
使用stm32主從門控模式精確控制脈衝個數
阿新 • • 發佈:2019-02-07
1,主從門控模式的介紹
STM32的每個定時器都可以由另一個定時器觸發啟動定時器一般是通過軟體設定而啟動,STM32的每個定時器也可以通過外部訊號觸發而啟動,還可以通過另外一個定時器的某一個條件被觸發而啟動.這裡所謂某一個條件可以是定時到時、定時器超時、比較成功等許多條件.這種通過一個定時器觸發另一個定時器的工作方式稱為定時器的同步,發出觸發訊號的定時器工作於主模式,接受觸發訊號而啟動的定時器工作於從模式。
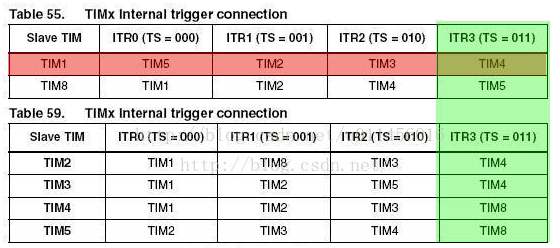
從這個圖中可以TIM3(master)控制TIM1(slave)需要將TIM1的ITR設定為ITR2
2,使用主從門控模式輸出如下要求的波形
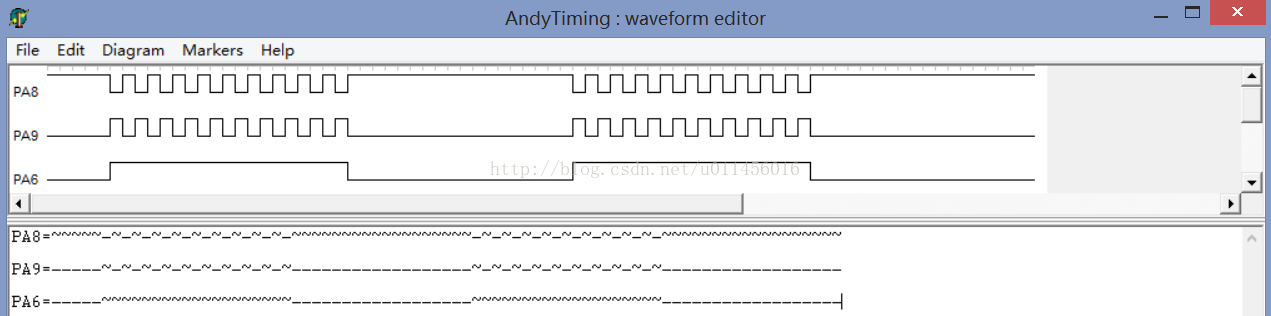
使用TIM3的CH1控制TIM1的CH1和CH2,每一個波的週期是25us,一組波的頻率是10HZ
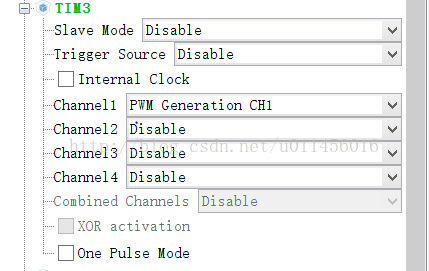
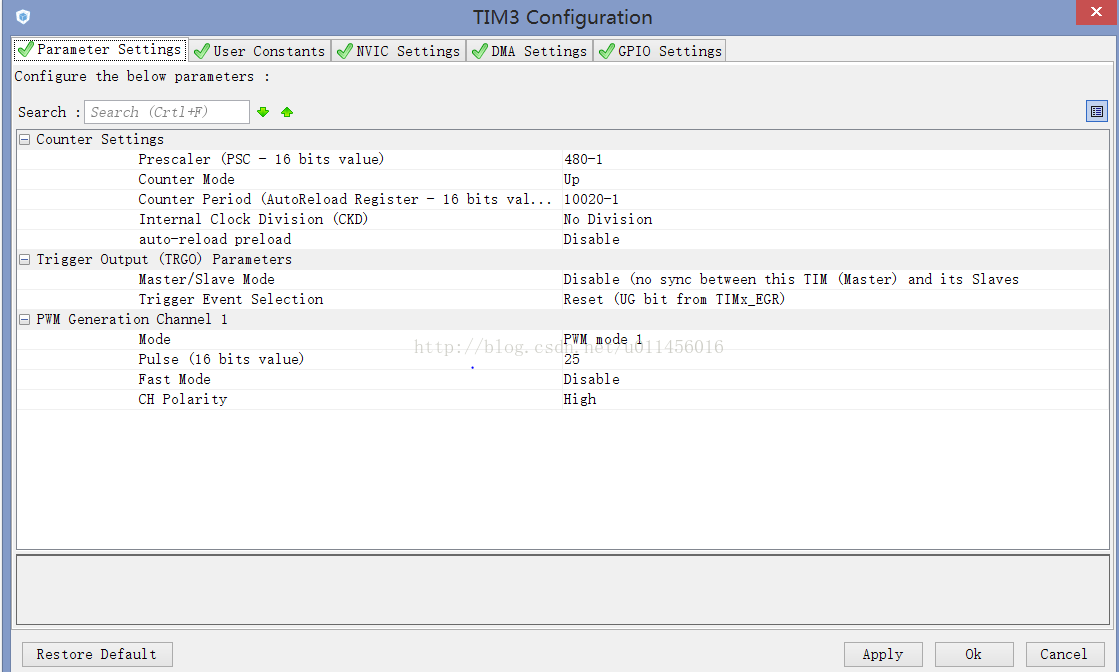
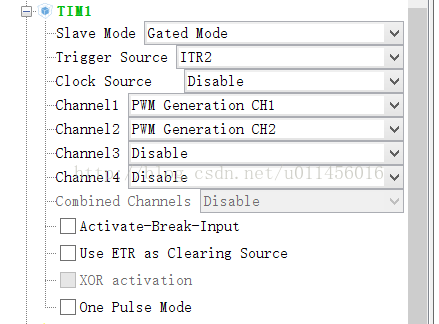
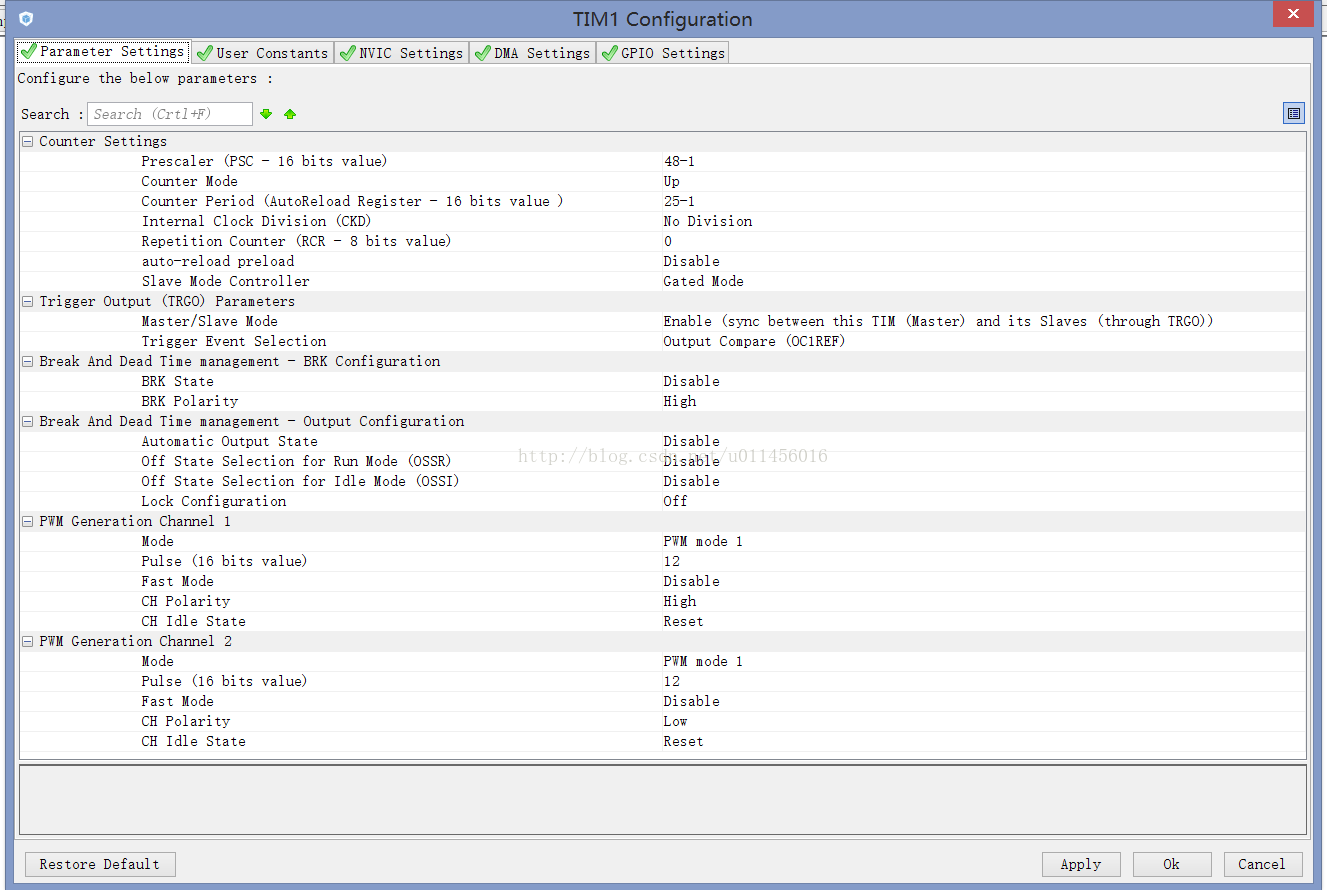
3,TIM的配置
TIM3:
從3,
4,程式碼實現
使用的晶片是stm32f051k6u6,HCLK= 48MHZ
/* TIM3 init function */ static void MX_TIM3_Init(void) { TIM_MasterConfigTypeDef sMasterConfig; TIM_OC_InitTypeDef sConfigOC; htim3.Instance = TIM3; htim3.Init.Prescaler = 480-1; htim3.Init.CounterMode = TIM_COUNTERMODE_UP; htim3.Init.Period = 10020-1; //100ms一組 htim3.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1; htim3.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_DISABLE; if (HAL_TIM_PWM_Init(&htim3) != HAL_OK) { Error_Handler(); } sMasterConfig.MasterOutputTrigger = TIM_TRGO_OC1REF; sMasterConfig.MasterSlaveMode = TIM_MASTERSLAVEMODE_DISABLE; if (HAL_TIMEx_MasterConfigSynchronization(&htim3, &sMasterConfig) != HAL_OK) { Error_Handler(); } sConfigOC.OCMode = TIM_OCMODE_PWM1; sConfigOC.Pulse = 25;//10個波 sConfigOC.OCPolarity = TIM_OCPOLARITY_HIGH; sConfigOC.OCFastMode = TIM_OCFAST_DISABLE; if (HAL_TIM_PWM_ConfigChannel(&htim3, &sConfigOC, TIM_CHANNEL_1) != HAL_OK) { Error_Handler(); } HAL_TIM_MspPostInit(&htim3); }
/* TIM1 init function */ static void MX_TIM1_Init(void) { TIM_SlaveConfigTypeDef sSlaveConfig; TIM_MasterConfigTypeDef sMasterConfig; TIM_OC_InitTypeDef sConfigOC; TIM_BreakDeadTimeConfigTypeDef sBreakDeadTimeConfig; htim1.Instance = TIM1; htim1.Init.Prescaler = 48-1; htim1.Init.CounterMode = TIM_COUNTERMODE_UP; htim1.Init.Period = 25-1; htim1.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1; htim1.Init.RepetitionCounter = 0; htim1.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_DISABLE; if (HAL_TIM_Base_Init(&htim1) != HAL_OK) { Error_Handler(); } if (HAL_TIM_PWM_Init(&htim1) != HAL_OK) { Error_Handler(); } sSlaveConfig.SlaveMode = TIM_SLAVEMODE_GATED; sSlaveConfig.InputTrigger = TIM_TS_ITR2; //TIM3 control TIM1 if (HAL_TIM_SlaveConfigSynchronization(&htim1, &sSlaveConfig) != HAL_OK) { Error_Handler(); } sMasterConfig.MasterOutputTrigger = TIM_TRGO_OC1REF; sMasterConfig.MasterSlaveMode = TIM_MASTERSLAVEMODE_ENABLE; if (HAL_TIMEx_MasterConfigSynchronization(&htim1, &sMasterConfig) != HAL_OK) { Error_Handler(); } sConfigOC.OCMode = TIM_OCMODE_PWM1; sConfigOC.Pulse = 12; sConfigOC.OCPolarity = TIM_OCPOLARITY_HIGH; sConfigOC.OCNPolarity = TIM_OCNPOLARITY_HIGH; sConfigOC.OCFastMode = TIM_OCFAST_DISABLE; sConfigOC.OCIdleState = TIM_OCIDLESTATE_RESET; sConfigOC.OCNIdleState = TIM_OCNIDLESTATE_RESET; if (HAL_TIM_PWM_ConfigChannel(&htim1, &sConfigOC, TIM_CHANNEL_1) != HAL_OK) { Error_Handler(); } sConfigOC.OCPolarity = TIM_OCPOLARITY_LOW; if (HAL_TIM_PWM_ConfigChannel(&htim1, &sConfigOC, TIM_CHANNEL_2) != HAL_OK) { Error_Handler(); } sBreakDeadTimeConfig.OffStateRunMode = TIM_OSSR_DISABLE; sBreakDeadTimeConfig.OffStateIDLEMode = TIM_OSSI_DISABLE; sBreakDeadTimeConfig.LockLevel = TIM_LOCKLEVEL_OFF; sBreakDeadTimeConfig.DeadTime = 0; sBreakDeadTimeConfig.BreakState = TIM_BREAK_DISABLE; sBreakDeadTimeConfig.BreakPolarity = TIM_BREAKPOLARITY_HIGH; sBreakDeadTimeConfig.AutomaticOutput = TIM_AUTOMATICOUTPUT_DISABLE; if (HAL_TIMEx_ConfigBreakDeadTime(&htim1, &sBreakDeadTimeConfig) != HAL_OK) { Error_Handler(); } HAL_TIM_MspPostInit(&htim1); }
在main函式中:
HAL_TIM_PWM_Start(&htim1,TIM_CHANNEL_1);
HAL_TIM_PWM_Start(&htim1,TIM_CHANNEL_2);
HAL_TIM_PWM_Start(&htim3,TIM_CHANNEL_1);
在剛上電的時候PIN腳的電平我們可以在初始的時候拉高或者拉低:
GPIO_InitStruct.Pull = GPIO_PULLDOWN;
但是PWM波輸出停止之後的PIN腳的電平我們不容易控制,他跟PWM波停止時的電平狀態相關,可以使用PIN重新初始化的方式,但是需要耗費較長的時間。