
STM32控制3路超聲波感測器
阿新 • • 發佈:2019-02-08
使用STM32定時器輸入捕獲模組控制3路超聲波感測器
本次使用的超聲波感測器是常見HC-SR04,該感測器常常使用在小型機器人和智慧小車的避障系統中。
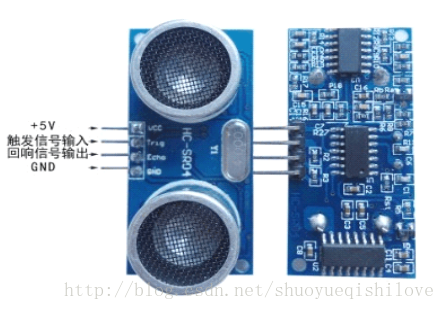
在上圖中,5v和GND為模組提供電能,Trig用於觸發模組測距,Echo用於接受返回電平訊號。
其操作時序圖如下:
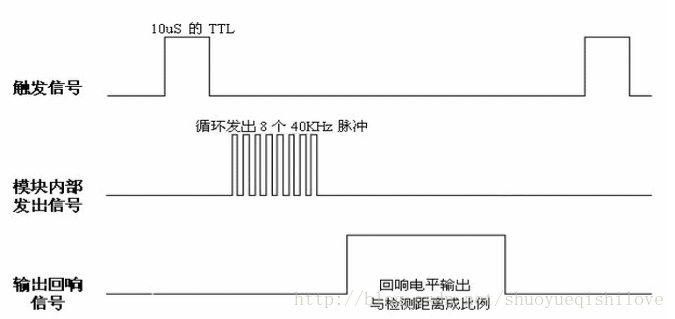
如上圖所示,STM32給Trig引腳一個超過10us的高電平,就可以使能模組內部的測距電路,模組會迴圈發出8個40kHz脈衝,發射出超聲波,然後通過檢測Echo引腳的高電平時間就可以測量出模組與障礙物之間的距離。其計算公式可表示如下:
模組驅動程式如下:
void HC_SR04_Init(void)
{
/*初始化GPIO*/
GPIO_InitTypeDef GPIO_InitStructure;
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
NVIC_InitTypeDef NVIC_InitStructure;
TIM_ICInitTypeDef TIM_ICInitStructure;
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOA, ENABLE);//使能GPIOA時鐘 值得注意的是,這裡的輸入捕獲的邊緣極性設定為上升和下降沿都捕獲,效率比較高,也有大神開始使用上升沿捕獲,然後在中斷中將捕獲記性設定為下降沿捕獲,我試過這種辦法,程式容易卡死,所以沒有采用。
中斷程式可以這樣編寫:
void TIM2_IRQHandler(void)
{
static uint16_t cnt_f,cnt_l,cnt_r;
if(TIM_GetITStatus(TIM2,TIM_IT_Update)!=RESET)
{
dist.overflow++;
TIM_ClearITPendingBit(TIM2, TIM_IT_Update);
// printf("overflow\n");
}
if(TIM_GetITStatus(TIM2, TIM_IT_CC2)!=RESET)
{
cnt_f++;
if(cnt_f%2==1)//檢測到了上升電平
{
TIM2->CNT=0;//計數器清零
}
else//檢測到了下降沿電平,讀取距離值
{
dist.cnt=TIM2->CNT;
TIM2->CNT=0;
dist.f_distance=(dist.overflow*0xffffffff+dist.cnt)*0.17f;
printf("F_dis=%.2fmm\n",dist.f_distance);
dist.overflow=0;
}
if(cnt_f>65535)cnt_f=0;
TIM_ClearITPendingBit(TIM2, TIM_IT_CC2);
}
if(TIM_GetITStatus(TIM2, TIM_IT_CC3)!=RESET)
{
cnt_l++;
if(cnt_l%2==1)//檢測到了上升電平
{
TIM2->CNT=0;
}
else
{
dist.cnt=TIM2->CNT;
TIM2->CNT=0;
dist.l_distance=(dist.overflow*0xffffffff+dist.cnt)*0.17f;
printf("L_dis=%.2fmm\n",dist.l_distance);
dist.overflow=0;
}
if(cnt_l>65535)cnt_l=0;
TIM_ClearITPendingBit(TIM2, TIM_IT_CC3);
}
if(TIM_GetITStatus(TIM2, TIM_IT_CC4)!=RESET)
{
cnt_r++;
if(cnt_r%2==1)
{
TIM2->CNT=0;
}
else
{
dist.cnt=TIM2->CNT;
TIM2->CNT=0;
dist.r_distance=(dist.overflow*0xffffffff+dist.cnt)*0.17f;
printf("R_dis=%.2fmm\n",dist.r_distance);
dist.overflow=0;
}
if(cnt_r>65535)cnt_r=0;
TIM_ClearITPendingBit(TIM2, TIM_IT_CC4);
}
}這樣設計的好處是中斷程式設計簡單,可以保證實時性。
觸發模組進行測量,通過給模組的Trig引腳一個超過10us高電平訊號就可以觸發模組進行距離測量,程式程式碼如下:
/*
function:啟動距離測量
choice: 0:左邊超聲波模組
1:中間超聲波模組
2:右邊超聲波模組
*/
void Get_Distance(uint8_t choice)
{
switch(choice)
{
case 0:
GPIO_ResetBits(GPIOA,GPIO_Pin_4);
GPIO_SetBits(GPIOA,GPIO_Pin_4);
Delay_us(15);
GPIO_ResetBits(GPIOA,GPIO_Pin_4);
break;
case 1:
GPIO_ResetBits(GPIOA,GPIO_Pin_5);
GPIO_SetBits(GPIOA,GPIO_Pin_5);
Delay_us(15);
GPIO_ResetBits(GPIOA,GPIO_Pin_5);
break;
case 2:
GPIO_ResetBits(GPIOA,GPIO_Pin_6);
GPIO_SetBits(GPIOA,GPIO_Pin_6);
Delay_us(15);
GPIO_ResetBits(GPIOA,GPIO_Pin_6);
break;
}
}