
Arduino 和 TB6612FNG 驅動直流電機
TB6612FNG 電機驅動模組
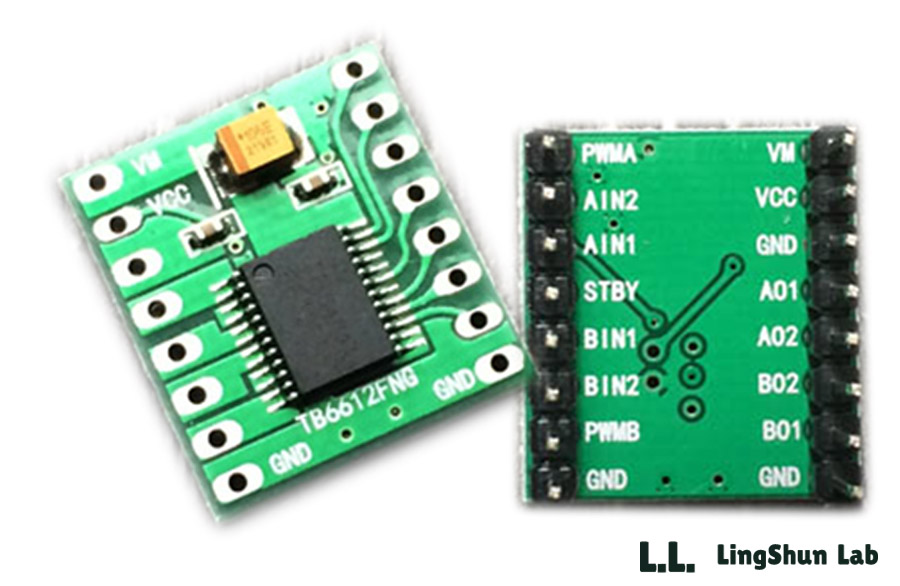
該模組相對於傳統的L298N效率上提高很多,體積上也大幅度減少,在額定範圍內,晶片基本不發熱。
TB6612FNG每通道輸出最高1.2 A的連續驅動電流,啟動峰值電流達2A/3.2 A(連續脈衝/單脈衝);
4種電機控制模式:正轉/反轉/制動/停止;
PWM支援頻率高達100 kHz;
待機狀態;
片內低壓檢測電路與熱停機保護電路;
工作溫度:-20~85℃;
SSOP24小型貼片封裝。
本篇文章參考任意門
引腳說明
A控制訊號輸入------PWMA VM ------電機驅動電壓輸入端(4.5V-15V)
A電機輸入端2 ------AIN2 VCC ------邏輯電平輸入端(2.7V-5.5V)
A電機輸入端1 ------AIN1 GND ------ 接地
正常工作/待機狀態控制端------STBY AO1 ------- A電機輸出端1
B電機輸入端1------BIN1 AO2 ------ A電機輸出端2
B電機輸入端2------BIN2 BO2 ------ B電機輸出端2
B控制訊號輸入端------PWMB BO1 ------ B電機輸出端1
接地------GND GND ------- 接地
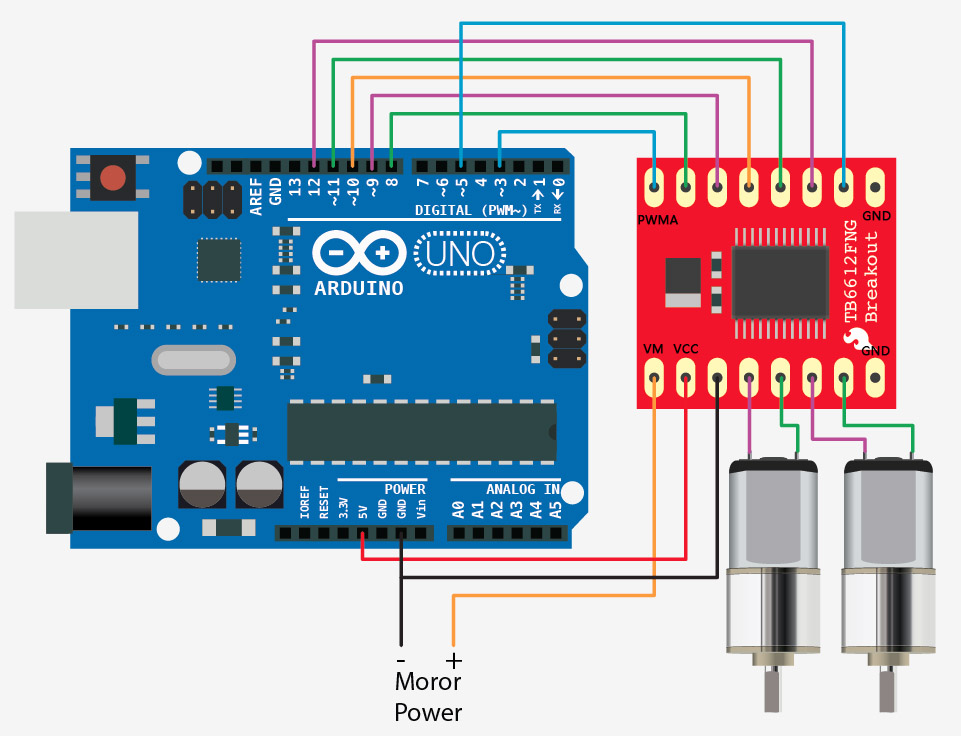
接線方式
程式實現

//motor A connected between A01 and A02 //motor B connected between B01 and B02 int STBY = 10; //standby //Motor A int PWMA = 3; //Speed control int AIN1 = 9; //Direction int AIN2 = 8; //Direction //Motor B int PWMB = 5; //Speed control int BIN1 = 11; //Direction int BIN2 = 12; //Direction void setup(){ pinMode(STBY, OUTPUT); pinMode(PWMA, OUTPUT); pinMode(AIN1, OUTPUT); pinMode(AIN2, OUTPUT); pinMode(PWMB, OUTPUT); pinMode(BIN1, OUTPUT); pinMode(BIN2, OUTPUT); } void loop(){ move(1, 255, 1); //motor 1, full speed, left move(2, 255, 1); //motor 2, full speed, left delay(1000); //go for 1 second stop(); //stop delay(250); //hold for 250ms until move again move(1, 128, 0); //motor 1, half speed, right move(2, 128, 0); //motor 2, half speed, right delay(1000); stop(); delay(250); } void move(int motor, int speed, int direction){ //Move specific motor at speed and direction //motor: 0 for B 1 for A //speed: 0 is off, and 255 is full speed //direction: 0 clockwise, 1 counter-clockwise digitalWrite(STBY, HIGH); //disable standby boolean inPin1 = LOW; boolean inPin2 = HIGH; if(direction == 1){ inPin1 = HIGH; inPin2 = LOW; } if(motor == 1){ digitalWrite(AIN1, inPin1); digitalWrite(AIN2, inPin2); analogWrite(PWMA, speed); }else{ digitalWrite(BIN1, inPin1); digitalWrite(BIN2, inPin2); analogWrite(PWMB, speed); } } void stop(){ //enable standby digitalWrite(STBY, LOW); }
例項效果
通電,並測量馬達A與B的輸出電壓,基本相同,電壓差在正負0.03V,輸出穩定。
想必能完美解決L9110S 和 L298N兩路電機輸出電壓誤差大導致的走不到直線。