
機器學習總結2_感知機演算法(PLA)
1.正式開始之前的描述
(1)
PLA:Perceptron Learning Algorithm。
在正式開始之前,我想先說一下,PLA到底是幹嘛的。大部分機器學習的書以及視訊都是以感知機演算法作為開頭的。既然放在最前面,它應該就是一個很簡單的機器學習演算法。事實上,它確實很簡單。
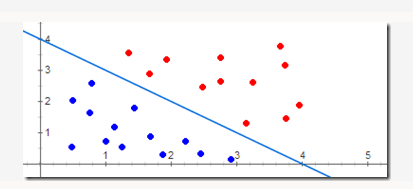
如下圖所示: 紅色和藍色的點分別表示訓練集中的正樣本和負樣本,PLA的任務就是尋找下面那條能將訓練集完全分開的藍色直線。(一般簡單的認為,這個樣本的類別是-1,那它就是負樣本;反之,它就是正樣本。正負樣本共同構成訓練集。)
注:圖片是從這篇部落格盜的,(:|。
http://blog.sina.com.cn/s/blog_59fabe030101ji4r.html
注意:這裡只是為了方便理解,我們才用二維座標系下的點表示樣本。事實上,樣本的特徵的維度往往要比2大的多,想象一下一個6維的點,我們很難去用圖形化的方式把它表示出來。
(2)
說了PLA是幹什麼的之後,我把正式開始PLA之前需要說清楚的一些概念先寫出來。
我們的訓練集裡面有N個樣本,
第i個樣本的特徵是:
第i個樣本的標籤(label)是:
!!!!一定要分清楚X 和x ,一定要分清楚上標和下標(上標表示第幾個樣本,下標表示這個樣本的第幾個特徵),一定要區分清楚樣本和特徵的概念,一定要分清楚N和n所表示的含義的不同(N表示樣本數量,n表示特徵的數量)!!!!
!!!!一定要分清楚X 和x ,一定要分清楚上標和下標(上標表示第幾個樣本,下標表示這個樣本的第幾個特徵),一定要區分清楚樣本和特徵的概念,一定要分清楚N和n所表示的含義的不同(N表示樣本數量,n表示特徵的數量)!!!!
!!!!一定要分清楚X 和x ,一定要分清楚上標和下標(上標表示第幾個樣本,下標表示這個樣本的第幾個特徵),一定要區分清楚樣本和特徵的概念,一定要分清楚N和n所表示的含義的不同(N表示樣本數量,n表示特徵的數量)!!!!
如果你對!!!!所說的內容有所疑惑的話,請暫停你前進的步伐,先百度把這幾個問題弄清楚,這個真的很重要。
(3)
PLA的輸出模型(也叫作目標函式):
注:W是一個n維的行向量,通常叫做權值向量,W=
X是一個n維的列向量,是樣本特徵,X=
sign函式:當k>0時,sign(k)=+1;當k<0時,sign(k)=-1。
(每次說到輸出模型,我總會想多叨嘮幾句,以確保看者能理解我想表達的意思。在PLA中輸出模型是h(X)函式,我們可以發現:只要我們知道了引數W和b,那麼h(X)也就可以確定了。所以可以說PLA演算法真正的輸出是W和b。能為了讓表述更系統化,我們通常都會說輸出模型是h(X)函式。)
W和X是兩個向量,我們做如下改寫:
W=
那麼原來的WX+b就可以直接寫成WX了。為了方便我們的描述,在本文如果沒有特別說明,都會沿用這種表達方式。
我們在(1)說了,PLA的任務是找到那條能把訓練樣本正確分類的直線(現在可以直觀的看出來,它不是一條直線那麼簡單了吧。在(1)中,只是為了方便描述,我們才把X的維度設定為2。當X的維度>2時,WX所表示的就是一個平面了,我們通常稱這個平面為分隔(分離)超平面)。
我覺得有必要先說一下,我們得到一個模型,這個模型怎麼用?
假設現在我們通過PLA演算法已經求得了一個模型。現在需要去預測一個不知道標籤的樣本的標籤是多少?
我們把這個樣本的特徵X帶入到h(X)中,h(X)就會等於+1或者-1(這個模型判斷的這個樣本最有可能屬於哪個類別),我們就預測出來這個樣本的標籤了。
2.正式的描述PLA演算法
假設訓練資料集是線性可分的(可以通過一條直線或者一個平面將訓練集完全分類正確)。
PLA演算法流程:
輸入:訓練資料集
輸出:W
(1)選取初值
(2)從訓練集中選取樣本
(3)更新。如果
(4)轉至(2),直至訓練集中的所有樣本被完全正確分類。
注:
1.正式開始之前的描述
(1)
PLA:Perceptron Learning Algorithm。
在正式開始之前,我想先說一下,PLA到底是幹嘛的。大部分機器學習的書以及視訊都是以感知機演算法作為開頭的。既然放在最前面,它應該就是一個很簡單的機器學
感知機演算法實戰Iris資料集
關於感知機的相關理論知識請檢視:感知機
關於Iris資料集
Iris也稱鳶尾花卉資料集,是一類多重變數分析的資料集。資料集包含150個數據集,分為3類,每類50個數據,每個資料包含4個屬性。可通過花萼長度,花萼寬度,花
本來想說3分鐘可以讀完的,但是想到自己的表達水平。我覺得可能需要多出2分鐘來理解我說的話。
感知機演算法
一開始這個名字,不懂的人覺得這個逼格很高,感覺很厲害的樣子,其實這個演算法很水的….
對於這個演算法,我們只需要知道下面這幾樣東西:
1.
話不多說,先上圖:
看完這個圖相信大家對感知機會有一個比較感性的認識:可以根據不同點的顏色用一條線將整個圖形平面劃分為兩個區域。
這聽起來對我們來說是非常容易的(目測一下就大概知道該怎麼劃線),但對於一個機器或電腦呢,他們是怎麼知道這條線該劃在哪?怎麼保
一入ML深似海啊…
這裡主要是《神經網路與機器學習》(Neural Networks and Learning Machines,以下簡稱《神機》)的筆記,以及一些周志華的《機器學習》的內容,可能夾雜有自己的吐槽,以及自己用R語言隨便擼的實現。
話說這個《神
感知機模型
感知機是一個二類分類的線性分類模型。所謂二類分類就是它只能將例項分為正類和負類兩個類別。那麼為什麼是線性分類模型呢,我的理解是感知機學習旨在求出可以將資料進行劃分的分離超平面,而分離超平面的方程 w⋅x+b=0 為線性方程,所以感知機為線性分類模型
此例項是利用svm演算法預測乳腺癌腫瘤是良性還是惡性,資料格式如下圖所示:第一列表示編號,2到10列表示資料屬性,第11列表示腫瘤標籤2表示良性4表示惡性。
程式碼如下
from sklearn import svm
# x = [[2, 0], [1, 1], [ 一、問題引入
支援向量機(SVM,Support Vector Machine)在2012年前還是很牛逼的,但是在12年之後神經網路更牛逼些,但是由於應用場景以及應用演算法的不同,我們還是很有必要了解SVM的,而且在面試的過程中SVM一般都會問到。支援向量機是一個非常經典且高效的分類模型。我們的目標:基 五、SVM求解例項
上面其實已經得出最終的表示式了,下面我們會根據一些具體的點來求解α的值。資料:3個點,其中正例 X1(3,3) ,X2(4,3) ,負例X3(1,1) 如下圖所示
我們需要求解下式的極小值
注意約束條件(在這裡不要忘記了yi代表的是資料
自己從頭寫一個演算法,不僅能給你帶來成就感,也能幫你真正理解演算法的原理。可能你之前用 Scikit-learn 實現過演算法,但是從零開始寫個演算法簡單嗎?絕對不簡單。
有些演算法要比其它演算法複雜的多,所以在寫演算法時可以先從簡單的開始,比如單層的感知機。
下面就介紹機器學家 John S
感知機
感知機是二分類的線性分類模型,輸入為例項的特徵向量,輸出為例項的類別(取+1和-1)。感知機對應於輸入空間中將例項劃分為兩類的分離超平面。感知機旨在求出該超平面,為求得超平面匯入了基於誤分類的損失函式,利用梯度下降法對損失函式進行最優化(最優 我們在上篇筆記中介紹了感知機的理論知識,討論了感知機的由來、工作原理、求解策略、收斂性。這篇筆記中,我們親自動手寫程式碼,使用感知機演算法解決實際問題。
先從一個最簡單的問題開始,用感知機演算法解決OR邏輯的分類。
import numpy as np
import matplotlib.pyplot as 本文主要總結決策樹中的ID3,C4.5和CART演算法,各種演算法的特點,並對比了各種演算法的不同點。
決策樹:是一種基本的分類和迴歸方法。在分類問題中,是基於特徵對例項進行分類。既可以認為是if-then規則的集合,也可以認為是定義在特徵空間和類空間上的條件概率分佈。
決策樹模型:決策樹由結點和有向邊組
新手入門學習機器學習,根據ApacheCN的視訊學習程式碼,視訊可以在bilibili線上播放。 有需要資料的可以在GitHub下載:https://github.com/RedstoneWill/MachineLearning 本文最主要的是分析程式碼的功能與實現,相應的原理大家拿看就好了
一、損失函式
在邏輯迴歸中,我們的預測函式和損失函式為:
預測函式:
損失函式:
我們知道當y分別是1和0的時候,其cost函式如下黑色曲線部分:
不難看出,當 y=1時,隨著 z 取值變大,預測損失變小,因此,邏輯迴歸想要在面對正樣本 y=1時
程式碼如下:
def classify0(inX, dataSet, labels, k):
# inX是用於分類的輸入向量,dataSet是輸入的訓練樣本集,lebels是標籤向量,k是用於選擇最近鄰居的數目
dataSetSiz
任務:將資料集中的樣本劃分成若干個通常不相交的子集。
效能度量:類內相似度高,類間相似度低。兩大類:1.有參考標籤,外部指標;2.無參照,內部指標。
距離計算:非負性,同一性(與自身距離為0),對稱性
一、scikit-learn SVM演算法庫概述
scikit-learn中SVM的演算法庫分為兩類,一類是分類演算法庫,包括SVC、 NuSVC和LinearSVC三個類。另一類是迴歸演算法庫,包括SVR、NuSVR和LinearSVR三個類。相關的
演算法的分類
收集的一個很實用的思維導圖
SKlearn的演算法地圖
具體地址:http://scikit-learn.org/stable/tutorial/machine_learning_m
基本思想:試圖尋找一個超平面來對樣本分割,把樣本中的正例和反例用超平面分開,並儘可能的使正例和反例之間的間隔最大。
演算法推導過程:
(1)代價函式:假設正類樣本y =wTx+ b>=+1,負
1.在(1)中,我們總是喜歡令
2.在(3)中,如果
如果
相關推薦
機器學習總結2_感知機演算法(PLA)
機器學習入門實戰——感知機演算法實戰Iris資料集
機器學習演算法【感知機演算法PLA】【5分鐘讀完】
機器學習第一站——感知機
記一下機器學習筆記 Rosenblatt感知機
《李航:統計學習方法》--- 感知機演算法原理與實現
機器學習之支援向量機演算法例項
機器學習之支援向量機演算法(一)
機器學習之支援向量機演算法(二)
教你6步從頭寫機器學習演算法——以感知機演算法為例
機器學習演算法原理與實踐(六)、感知機演算法
機器學習筆記(1) 感知機演算法 之 實戰篇
機器學習總結(八)決策樹ID3,C4.5演算法,CART演算法
《機器學習實戰》學習總結1——K-近鄰演算法
NG機器學習總結-(七)SVM支援向量機
《機器學習實戰》學習總結1——K-近鄰演算法(程式清單2-1)
機器學習總結(十):常用聚類演算法(Kmeans、密度聚類、層次聚類)及常見問題
機器學習之支援向量機SVM Support Vector Machine (五) scikit-learn演算法庫
機器學習總結 選擇一個合適的演算法
機器學習總結(三):SVM支援向量機(面試必考)