
光流(七)--Brox演算法(DeepFlow)
原文:
http://www.cnblogs.com/dzyBK/p/5096860.html
參考論文:
1. High Accuracy Optical Flow Estimation Based on a Theory for Warping, Thomas Box, ECCV2004
2. Beyond Pixels Exploring New Representations and pplications for Motion Analysis, Ce Liu, MIT2009
3. Lucas/Kanade meets Horn/Schunck: Combining local and global optic flow methods, Andres Bruhn, IJCV2005
閱讀基礎:
1.瞭解變分法,這項可選。
2.熟悉HS光流演算法,這項必選。
基於能量最小化的光流演算法都比較複雜,這裡分成以下幾部分來闡述
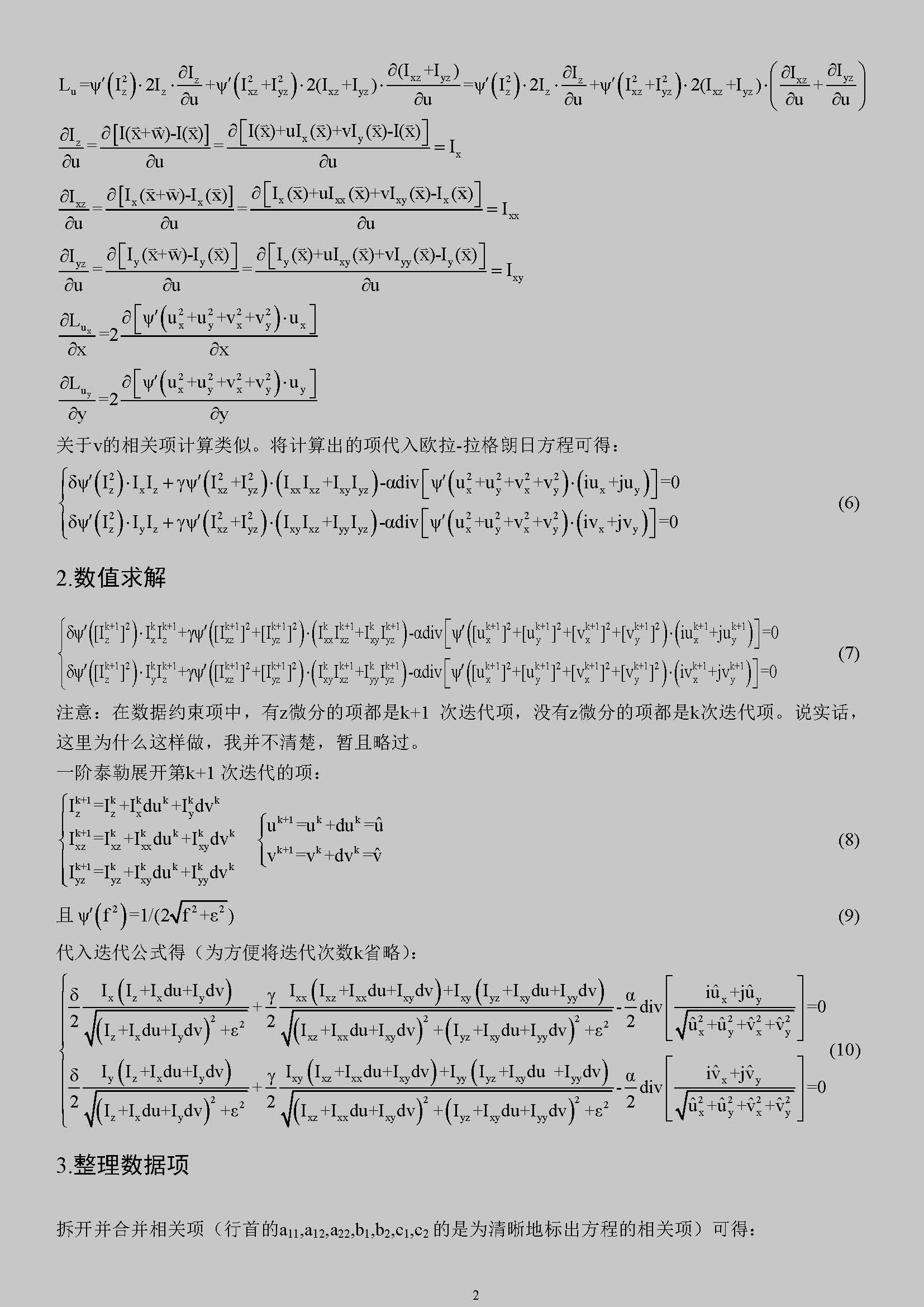
(1)尤拉-拉格朗日方程的推導
(2)數值求解
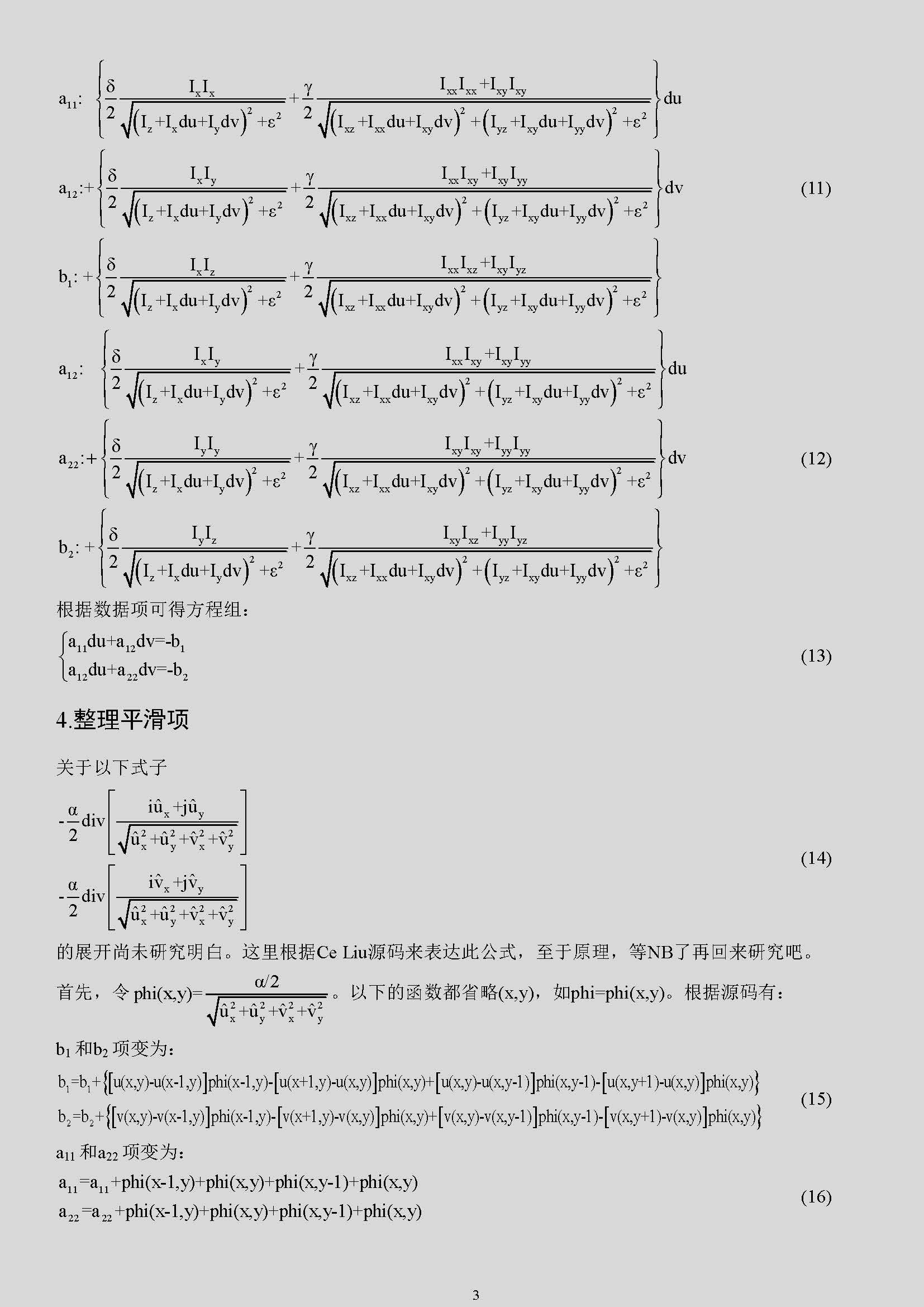
(3)整理資料項
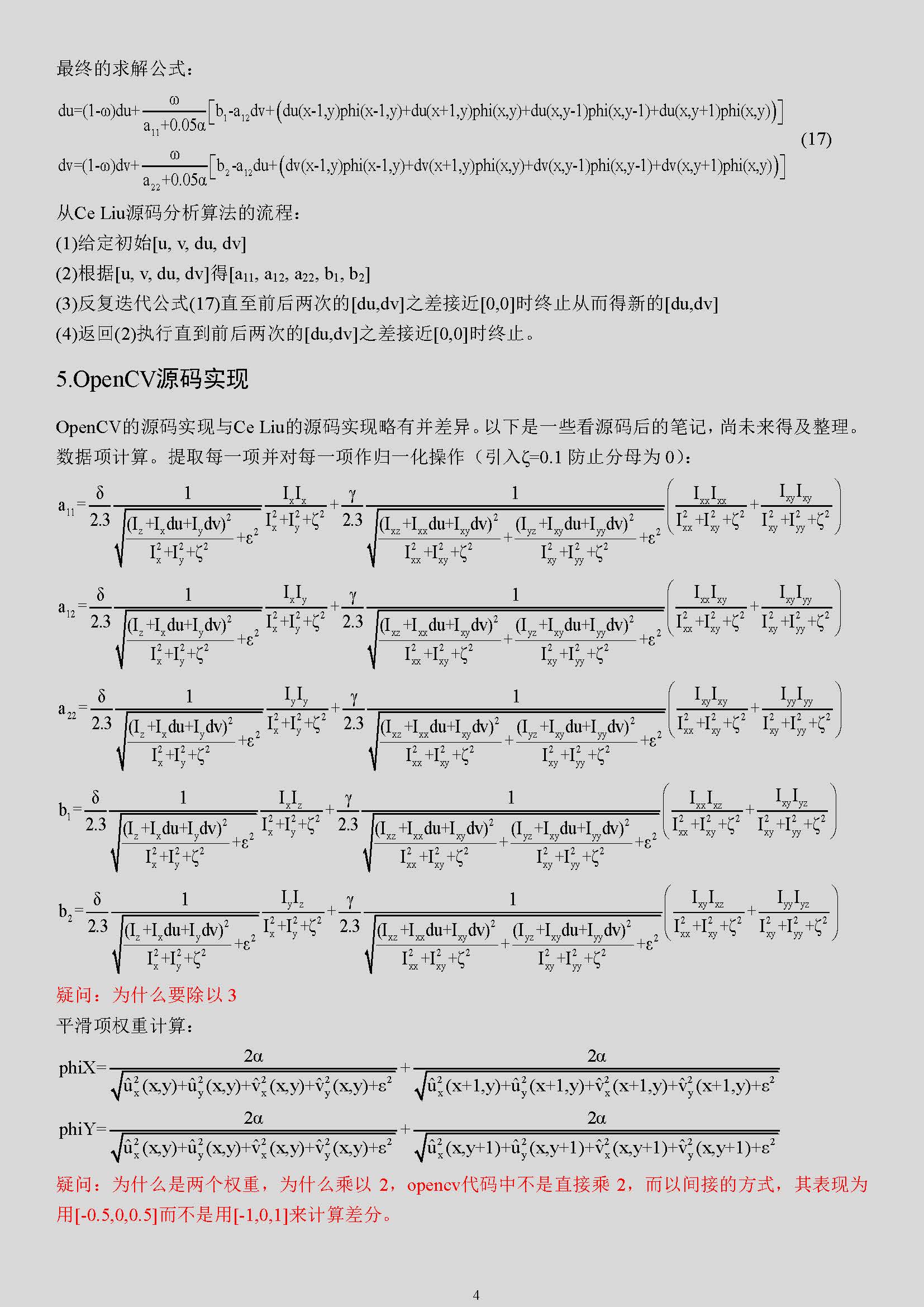
(4)整理平滑項
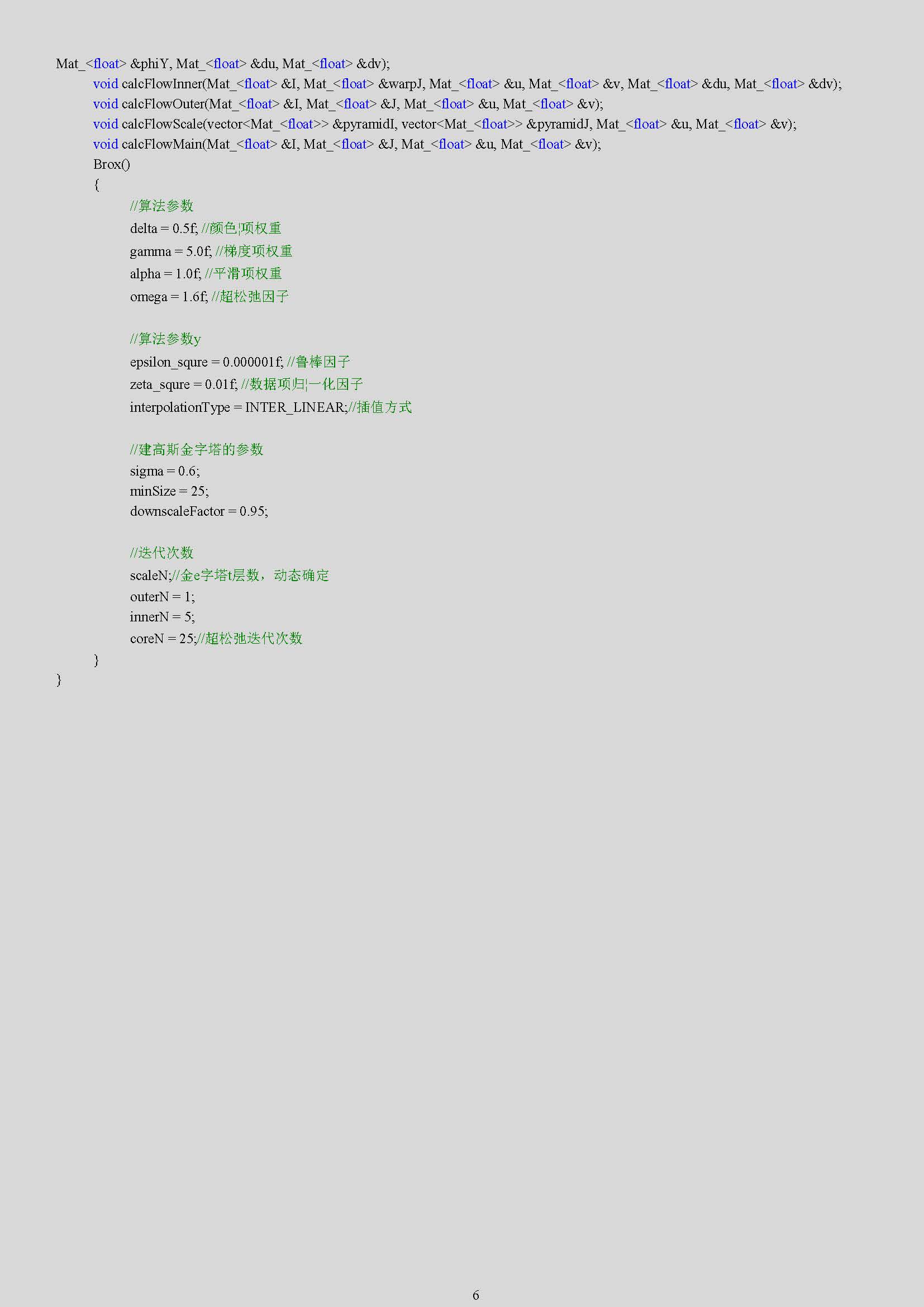
懶得再寫一遍啦,還是上傳影象吧。


相關推薦
光流(七)--Brox演算法(DeepFlow)
原文: http://www.cnblogs.com/dzyBK/p/5096860.html 參考論文: 1. High Accuracy Optical Flow Estimation Based on a Theory for Warping, Thomas Box
光流法-運動目標的檢測(opencv學習)
cvCalcOpticalFlowPyrLK 函式在使用時,首先要確定特徵點,也就是目標舊的位置。 本程式通過使用cvGoodFeaturesToTrack 函式選擇角點作為特徵點。 本程式只是一個簡單的運動檢測,在具體應用過程中,可以根據自己的需要修正 #i
機器學習筆記(七)Boost演算法(GDBT,AdaBoost,XGBoost)原理及實踐
在上一篇部落格裡,我們討論了關於Bagging的內容,其原理是從現有資料中有放回抽取若干個樣本構建分類器,重複若干次建立若干個分類器進行投票,今天我們來討論另一種演算法:提升(Boost)。 簡單地來
機器學習實戰(十)Apriori演算法(關聯分析)
目錄 0. 前言 1. Apriori 演算法尋找頻繁項集 2. 從頻繁項集中挖掘關聯規則 3. 實戰案例 3.1. apriori演算法發現頻繁項集和關聯規則 學習完機器學習實戰的Apriori,簡單的做個筆記。文中部分描述屬於
機器學習-4(k-進鄰演算法簡介中)
既然要介紹該演算法,我們就簡單介紹一下歐式距離 這個應該是我們初中就學過的了,2點之間的距離就是它的多維空間裡面每個維度的座標的差的平方之和,再開方 公式就是 OK,我們現在按照分類的基本原則,把所有的樣本集都放進我們的座標系裡面來,有多少特徵,我們就建立幾維的空間座標系。
資料結構一(資料結構與演算法基本含義)
1.1 基礎概念 ● 資料元素 ● 是組成資料的,有一定意義的單位 ● 在計算機中通常作為整體處理 ● 也叫做結點或記
JVM GC調優(3)-----GC演算法(部分摘自深入理解Java虛擬機器)
介紹幾種GC演算法的思想及其發展過程: 標記-清除 複製 標記-壓縮 分代收集演算法 GC演算法主要是用於堆死亡物件的清理的集中方式,他們各有優缺點,下面我們開始做介紹 標記清除演算法 原理解析 -最基礎的收集演算法是“標記-清除”( Mark-Swe
最短尋道時間優先演算法(SSTF)&&掃描演算法(SCAN)
最短尋道時間優先演算法(SSTF) SSTF問題描述:SSTF演算法選擇排程處理的磁軌是與當前磁頭所在磁軌距離最近的磁軌,以使每次的尋找時間最短。當然,總是選擇最小尋找時間並不能保證平均尋找時間最小,但是能提供比FCFS演算法更好的效能。這種演算法會產生“飢餓”現象。
C# Winform 窗體美化(七、Win7 Aero 毛玻璃效果)
七、Win7 Aero 毛玻璃效果 在 Win7 上有一種 Aero 效果,毛玻璃透明效果,搭配不同風格的顏色,效果很好。在學習 Winform 美化的時候順便看到的這種效果,也整理進來了。 注意:Win7 上想看到這種效果需要開啟並使用 Aero 效果的主
資料結構--二叉樹--輸出樹中從根到每個葉子節點的路徑(樹遍歷演算法的應用) .
void AllPath(Bitree T, Stack &S)//輸出二叉樹上從根到所有葉子結點的路徑 { if(T) { Push(S,T->data); if(!T->Left&&!T->Right)/
演算法(一)排序演算法(桶排序、氣泡排序、快速排序)
第一次排序:首先,找一個"基準數",比如5,然後,先從右到左,找到第一個小於基準數的數,4,再從左到右,找到第一個大於基準數的數,9將它們進行交換,5,1,4,26,2,9,5,7,52,21繼續從右到左,尋找小於基準數的數,從左到右,尋找大於基準數的數,並交換,直到兩個相遇,5,1,4,2,26,9,5,7
R語言︱機器學習模型評估方案(以隨機森林演算法為例)
筆者寄語:本文中大多內容來自《資料探勘之道》,本文為讀書筆記。在剛剛接觸機器學習的時候,覺得在監督學習之後,做一個混淆矩陣就已經足夠,但是完整的機器學習解決方案並不會如此草率。需要完整的評價模型的方式。 常見的應用在監督學習演算法中的是計算平均絕對誤差(
最短路徑(二)—Dijkstra演算法(通過邊實現鬆弛:鄰接矩陣)
上一節通過Floyd-Warshall演算法寫了多源節點最短路徑問題: 這一節來學習指定一個點(源點)到其餘各個頂點的最短路徑。也叫做“單源最短路徑”Dijkstra。 例如求下圖中1號頂點到2、3、4、5、6號頂點的最短路徑。 用二維陣列e儲存頂點之間邊的關係,初
GIF影象格式(二)——基礎演算法(下)
initialze_string_table(root_number); last_code = -1;
【機器學習】決策樹(三)——生成演算法(ID3、C4.5與CRAT)
回顧 前面我們介紹了決策樹的特徵選擇,以及根據資訊增益構建決策樹。 那麼決策樹的生成又有哪些經典演算法呢?本篇將主要介紹ID3的生成演算法,然後介紹C4.5中的生成演算法。最後簡單介紹CRAT演算法。 ID3演算法 前面我們提到,一般而言,資訊增
最小生成樹(Kruskal 演算法和 Prim 演算法)——貪心演算法(C語言)
本內容將介紹最小生成樹(MST:Minimum Cost Spanning Tree)的兩種解法,分別為 Kruskal 演算法(克魯斯卡爾演算法)和 Prim 演算法(普里姆演算法),並且它們都屬於貪心演算法。 問題描述: 產生最小生成樹(MS
加速度校準分析(Pixhawk加速度校準演算法簡析)
1. 加速度計上電校準零偏是否可行? 答案是否,以PX4飛控為例,在NED系下,水平放置時,機體測量加速度的資料應該是[0 0 -g],所以,除非你確定你的飛控校準加速度零偏的時候是絕對的水平,否則只會加大誤差,更別談每次上電自動校準,減零偏了,試想一下,如果我就是要飛
Java技術棧(2)排序演算法(冒泡,快速排序)
1.氣泡排序 氣泡排序是一種簡單的排序演算法。它重複地走訪過要排序的數列,一次比較兩個元素,如果他們的順序錯誤就把他們交換過來。走訪數列的工作是重複地進行直到沒有再需要交換,也就是說該數列已經排序完成。這個演算法的名字由來是因為越小的元素會經由交換慢慢“浮”到數列的頂端
GIF影象格式(一)——基礎演算法(上)
現在我們看看每一步是怎麼做的:第一步:初始化我們的編碼表。剛才說了,初始化編碼表只需要一個引數:root_number,也就是根項的數目。其實他就是我們要編碼的Char Stream中的字符集的數目。初始化也很簡單:根據一個事先的約定對所有的Char進行排序,然後從零開始對其編上一個index,形成一個ite
最短路徑演算法(一) Dijkstra演算法(貪心演算法)
Dijkstra演算法是由荷蘭電腦科學家狄克斯特拉(Dijkstra)於1959 年提出的,因此又叫狄克斯特拉演算法。是從一個頂點到其餘各頂點的最短路徑演算法,解決的是有向圖中最短路徑問題。其基本原理是:每次新擴充套件一個距離最短的點,更新與其相鄰的點的距離。當所有邊權都為正