[計算機圖形學經典演算法] Cohen-Sutherland 演算法 (附Matlab程式碼)
阿新 • • 發佈:2019-02-14
剛學習了計算機圖形學這門課程,為奠定根基的演算法所傾倒,特此記錄一二。
Cohen-Sutherland 演算法
編碼
- Cohen-Sutherland 演算法是早期圖形學演算法中的一顆明珠,這種演算法使用了一種較少使用的編碼方法,較好地解決了直線段的剪裁問題,在效率和簡便性上均表現良好。
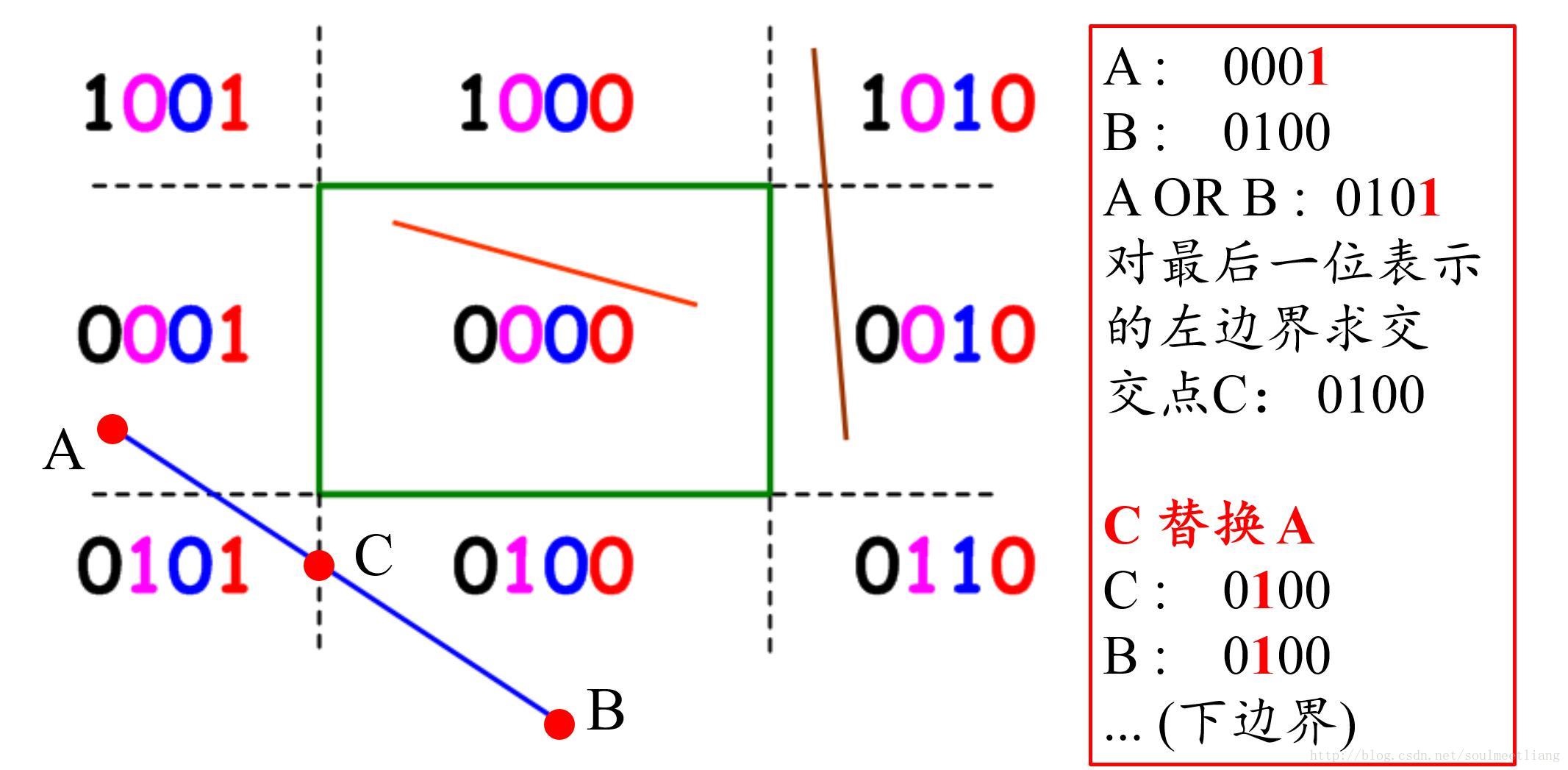
- 為介紹 Cohen-Sutherland 演算法,我們先描述對窗體所在平面的編碼。
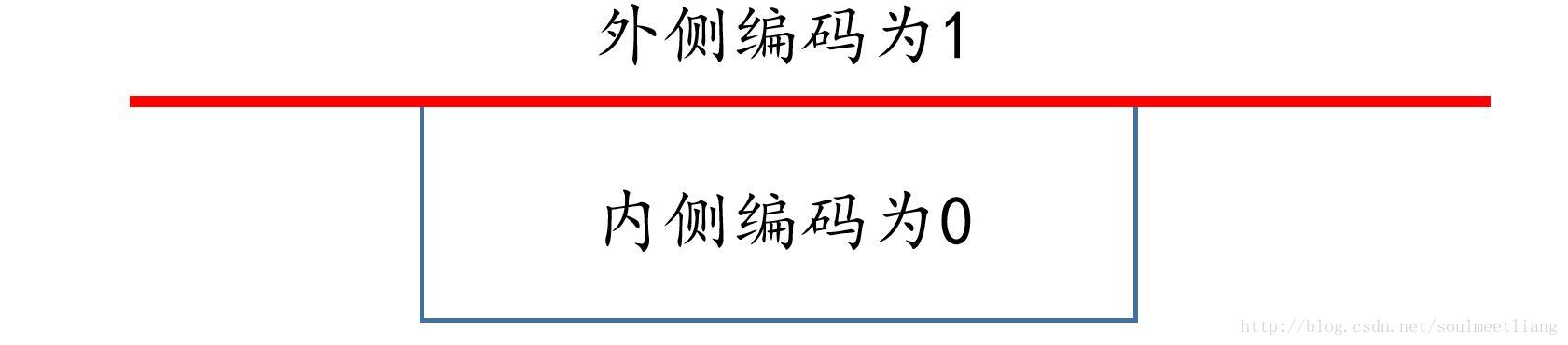
與或
- Cohen-Sutherland 演算法的優點在於,可根據簡單的直線端點間的“與”、“或”操作,排除大量無需剪裁的直線段。對這些直線段,因無需進行與邊界間的交點計算以及相應的實、虛交點判別,所以大大提高了檢測與計算效率。
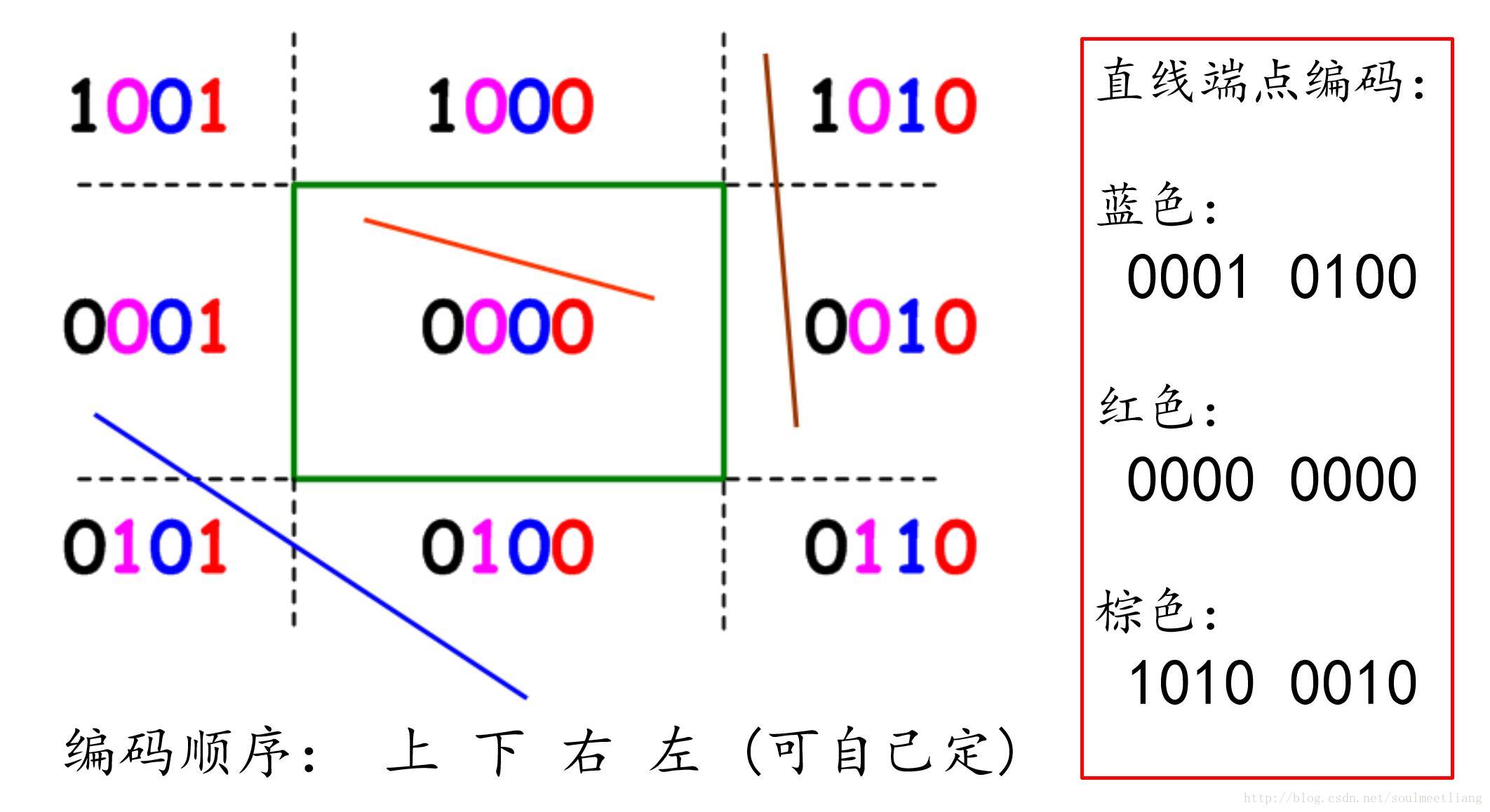
- 視窗內部的點根據兩端點編碼的“或”運算直接判定:
- 0000 0000 -> 0000 邏輯或
- 大部分視窗外側的直線段可以根據兩端點編碼的“與”運算直接判定:
- 1010 0010 -> 0010 邏輯與
求交
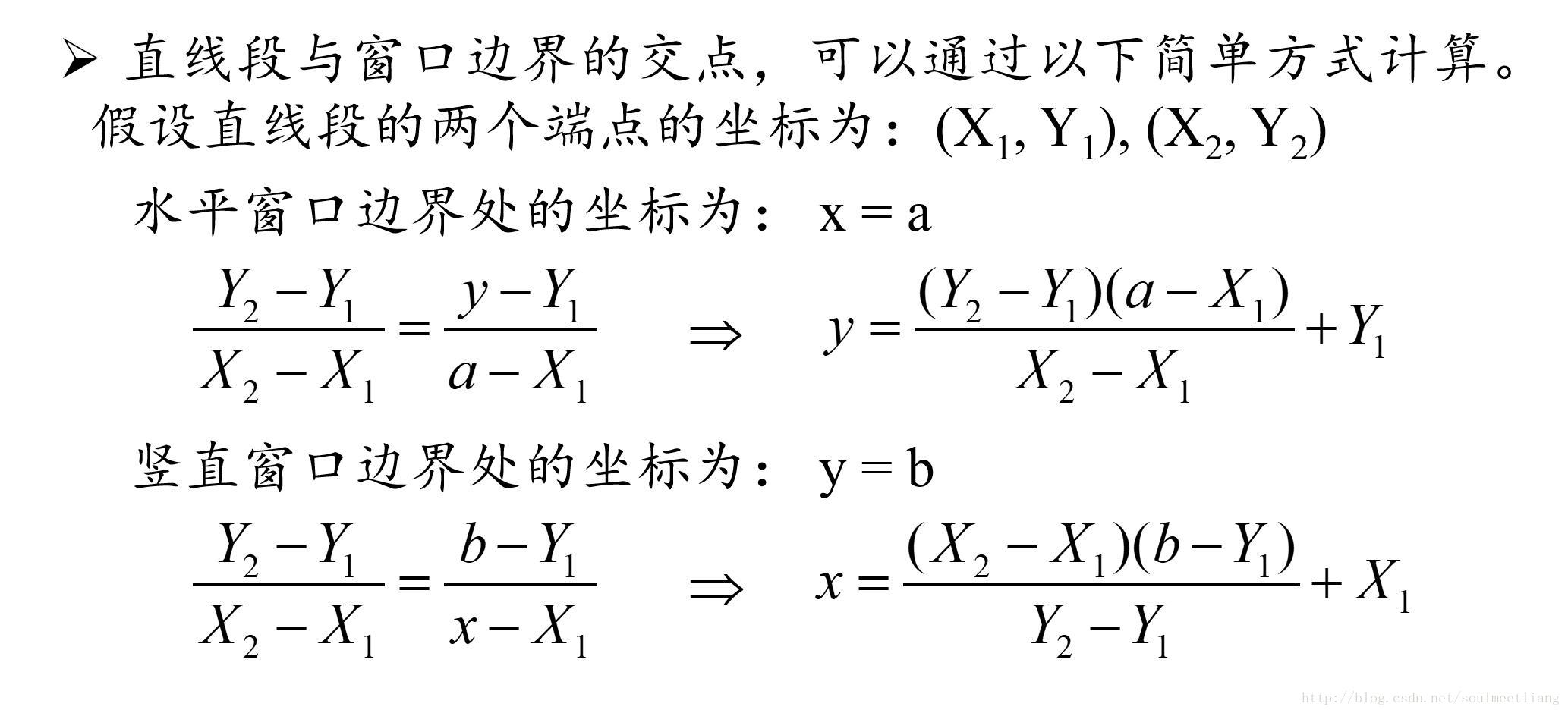
- 對於不能直接排除的直線段,我們需要計算交點。
- 在 Cohen-Sutherland 演算法中,計算交點是根據編碼資訊確定的,只有當“或”運算結果為 1 的編碼位對應的視窗邊界才需要計算交點。
- 如前面的例子中,藍色直線段不能直接排除,需要計算交點。此時觀察其兩個端點的編碼:

計算
虛實
- 當計算出一個直線段與視窗邊界的交點後,我們需要將新計算出的交點替換掉原來此編碼位出現 1 的端點。然後與另一端點繼續進行“或”運算來判定是否需要計算交點。
- 需要進行上述替換並繼續計算交點的原因,是計算出的交點可能是虛交點。
- 只有當最後進行邏輯或判定的兩個交點(或端點)最後的或運算結果為 0000 時,整個過程結束。
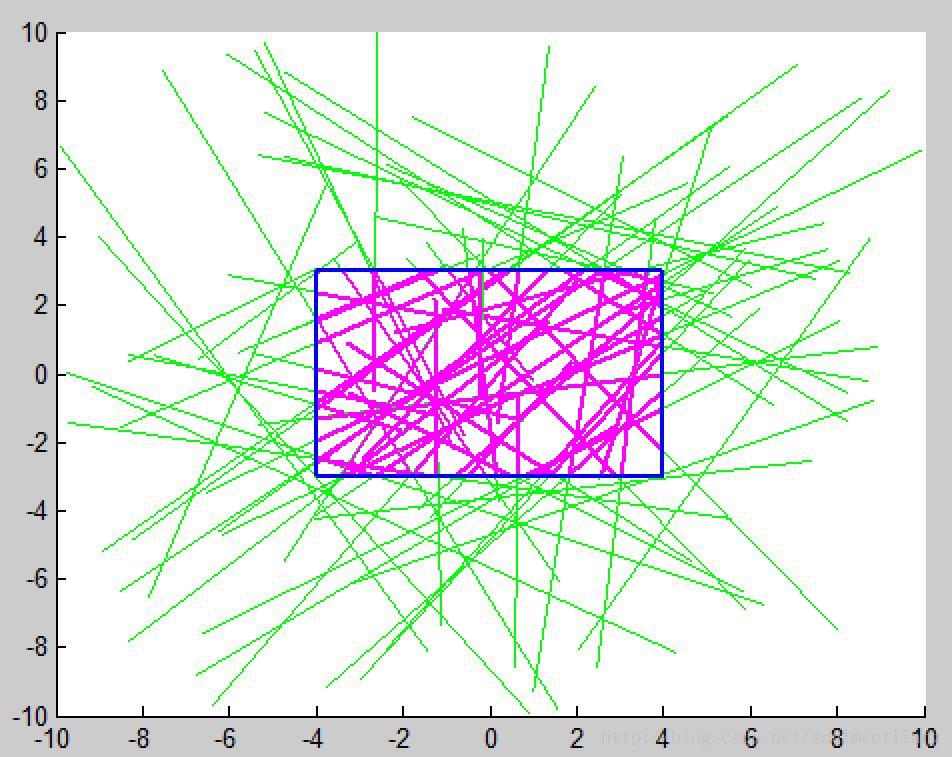
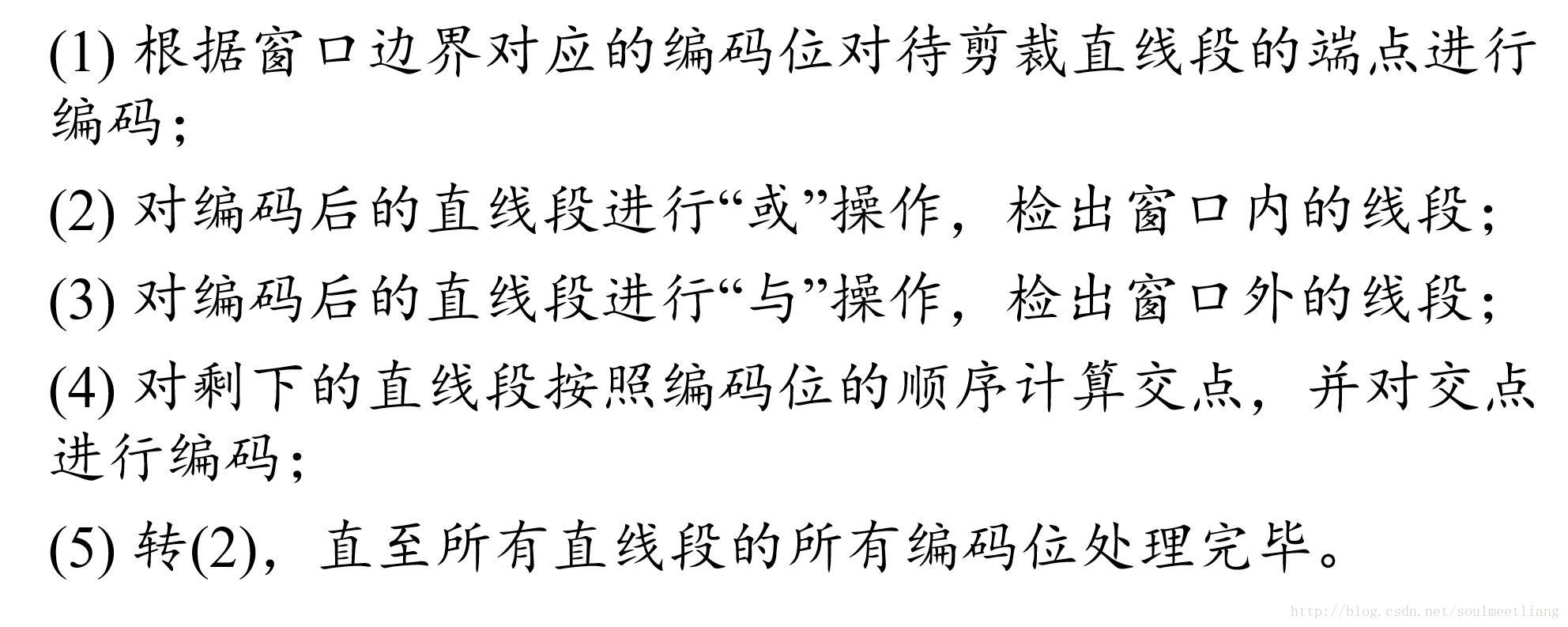
演算法
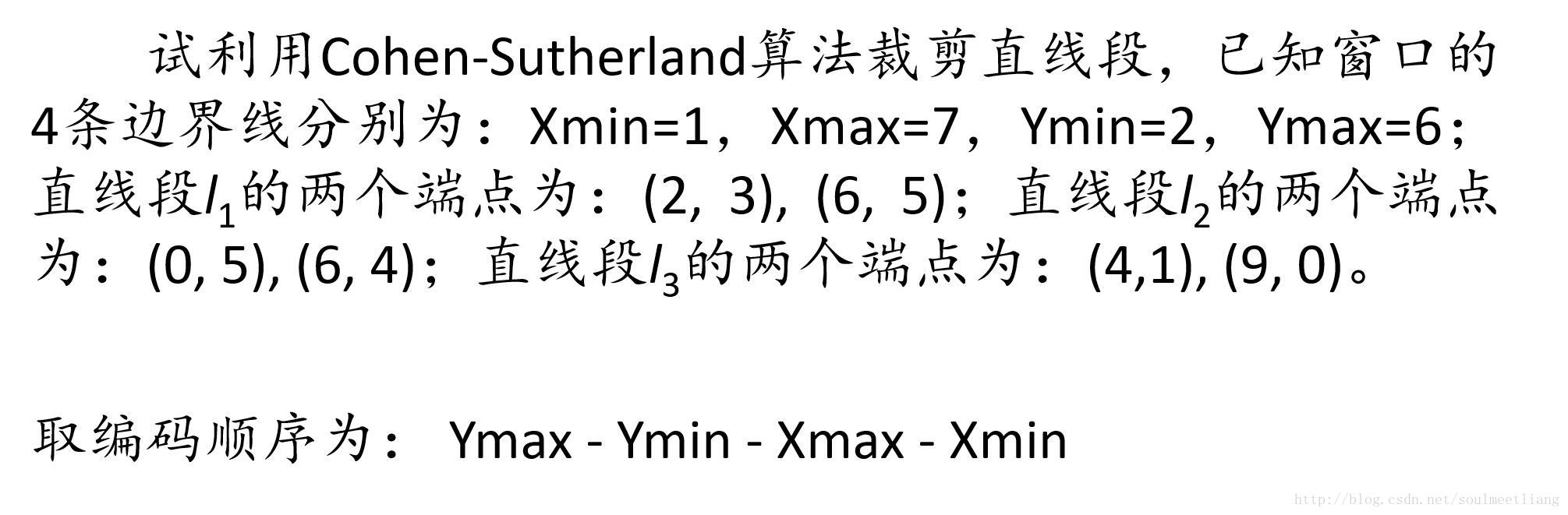
示例
Matlab程式碼
clear all;
n = 100;
Xmin = -4; Xmax = 4;
Ymin = -3; Ymax = 3;
figure; hold on;
P1x = rand(1,n)*20 - 10;
P2x = rand(1,n)*20 - 10;
P1y = rand(1,n)*20 - 10;
P2y = rand(1,n)*20 - 10;
P1code = zeros