
經典排序演算法分析及實現
一、排序概念
1. 排序:將一組雜亂無章的資料按照一定的規律組織起來,就稱為排序。
2. 資料表:待排序的資料元素的有限集合。
3. 排序碼:通常資料元素有多個屬性域,其中有一個屬性域可以用來區分元素,作為排序依據,該域即為排序碼。
* 若在資料表中各個元素的排序碼各不相同,這種排序碼稱為主排序碼。
* 按照主排序碼進行排序,排序的結果是唯一的。
* 按照次排序碼進行排序,排序結果不唯一。
二、排序演算法的穩定性
如果在元素序列中有兩個元素R[i]和R[j],他們的排序碼K[i]==K[j],且在排序之前,R[i]在R[j]前面。若在排序後,R[i]仍然在R[j]前面,則稱這個演算法是穩定的。否則,這個演算法是不穩定的。
三、經典排序演算法

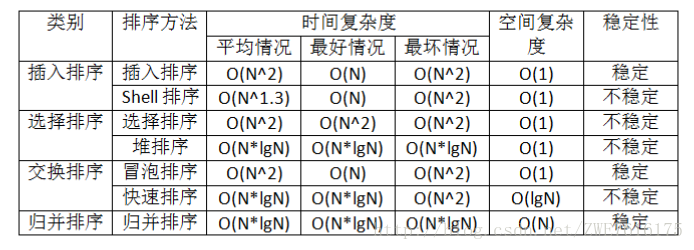
演算法總結
3.1.插入排序
3.1.1直接插入排序
基本思想:
當插入第i個元素時,前面的array[0]、array[1]、array[2]……array[i-1]已經排好序,此時用array[i]的排序碼與array[i-1]、array[i-2]……的排序碼進行比較,找到插入位置將array[i]插入,原來位置上的元素順序右移。
動畫演示:
程式碼實現:
////////////////////插入排序//////////////////////////
//插入排序
//時間複雜度:O(n^2)
//空間複雜度:O(1)
//穩定性:穩定
void InsertSort(int* array,int size)
{
//[0,end] end+1插入 改進:二分法插入排序
優點:查詢更快,減少比較操作的次數,效率更高。
//二分插入排序
void InsertSort_OP(int* array, size_t size)
{
for (int i = 1; i < size; i++)
{
//在已序序列中查詢待插入元素的位置
int left = 0;
int right = i - 1;
int key = array[i];
while (left <= right)
{
int mid = left + ((right - left) >> 1);
if (key < array[mid])
right = mid - 1;
else
left = mid + 1;
}
//搬移元素
int end = i - 1;
while (end >= left)
{
array[end + 1] = array[end];
end--;
}
//插入元素
array[left] = key;
}
}
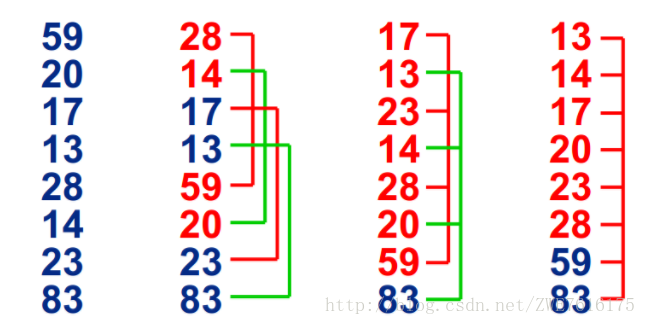
3.1.2 希爾排序
基本思想:
希爾排序(Shell’s Sort)是插入排序的一種又稱“縮小增量排序”(Diminishing Increment Sort),是直接插入排序演算法的一種更高效的改進版本。希爾排序是非穩定排序演算法。該方法因D.L.Shell於1959年提出而得名。
希爾排序是把記錄按下標的一定增量分組,對每組使用直接插入排序演算法排序;隨著增量逐漸減少,每組包含的關鍵詞越來越多,當增量減至1時,整個檔案恰被分成一組,演算法便終止。
動畫實現:
程式碼實現:
//希爾排序
//時間複雜度:O(n^1.25 ~ 1.6n^1.25)
//空間複雜度:O(1)
//穩定性:穩定
//適用場景:資料量大
/*
void ShellSort(int* array, size_t size)
{
int gap = 3;
while (gap)
{
for (size_t i = gap; i < size; ++i)
{
int key = array[i];
int end = i - gap;
//找到當前需要插入元素的位置
while (end >= 0 && array[end] > key)
{
array[end + gap] = array[end];
end -= gap;
}
//插入元素
array[end + gap] = key;
}
gap--;
}
}
*/
void ShellSort(int* array, size_t size)
{
int gap = size;
while (gap > 1)
{
gap = gap / 3 + 1;//經過大量計算得到此類方法時間複雜度較低
for (size_t i = gap; i < size; ++i)
{
int key = array[i];
int end = i - gap;
//找到當前需要插入元素的位置
while (end >= 0 && array[end] > key)
{
array[end + gap] = array[end];
end -= gap;
}
//插入元素
array[end + gap] = key;
}
}
}3.2 選擇排序
3.2.1 選擇排序
基本思想:
選擇排序(Selection sort)是一種簡單直觀的排序演算法。它的工作原理是每一次從待排序的資料元素中選出最小(或最大)的一個元素,存放在序列的起始位置,直到全部待排序的資料元素排完。 選擇排序是不穩定的排序方法(比如序列[5, 5, 3]第一次就將第一個[5]與[3]交換,導致第一個5挪動到第二個5後面)。
動畫實現:
程式碼實現:
//選擇排序
//時間複雜度:O(N^2)
//空間複雜度:O(1)
//穩定性:不穩定
void SelectSort(int* array, size_t size)
{
int begin = 0;
int end = size - 1;
while (begin < end)
{
int min = begin;
int max = end;
for (size_t i = begin; i < end; ++i)
{
if (array[i] < array[min])
min = i;
if (array[i] > array[max])
max = i;
}
swap(array[begin], array[min]);
//修正
if (min == end)
min = max;
swap(array[end], array[max]);
++begin;
--end;
}
}
3.2.2 堆排序
基本思想:
將待排序序列構造成一個大頂堆,此時,整個序列的最大值就是堆頂的根節點。將其與末尾元素進行交換,此時末尾就為最大值。然後將剩餘n-1個元素重新構造成一個堆,這樣會得到n個元素的次小值。如此反覆執行,便能得到一個有序序列了
動畫實現:
程式碼實現:
//堆排序之向下調整
void AdjustDown(int* array, size_t size, int root)
{
int parent = root;
int child = parent * 2 + 1;
while (child < size)
{
if (child + 1 < size && array[child + 1] > array[child])
{
child++;
}
if (array[child] > array[parent])
{
swap(array[child], array[parent]);
parent = child;
child = child * 2 + 1;
}
else
{
break;
}
}
}
//堆排序
//時間複雜度:O(n*lgN)
//空間複雜度:O(1)
//穩定性:不穩定
void HeapSort(int* array, size_t size)
{
//調整堆
for (int i = (size - 2) / 2; i >= 0; --i)
{
AdjustDown(array, size, i);//向下調整
}
//排序
int end = size - 1;
while (end >= 0)
{
swap(array[end], array[0]);
AdjustDown(array, end, 0);
end--;
}
}
3.3 交換排序
3.3.1 氣泡排序
基本思想:
設序列中有n個數據元素,迴圈進行n-1趟如下排序:
第1趟:依次比較相鄰兩個資料元素(i = 0,1,2,…, n-2),若array[i]>array[i+1],則交換兩個元
素,否則不交換,這樣數值最大的資料元素將被防止在a[n-1]中;
第2趟:資料個數減1,即資料元素個數為n-1,操作方式和1類似,排完之後資料序列中的次大元素
儲存在array[n-2]中;
當n-1趟結束時,排序結束。
動畫實現:

程式碼實現:
//氣泡排序
//時間複雜度:O(N^2)
//空間複雜度:O(1)
//穩定性:穩定
void BubbleSort(int* array, size_t size)
{
for (size_t end = size; end > 0; --end)
{
bool exchange = false;
for (size_t i = 1; i < end; i++)
{
if (array[i - 1]>array[i])
{
swap(array[i - 1], array[i]);
exchange = true;
}
}
if (exchange == false)
break;
}
}氣泡排序與插入排序的區別:插入排序更優
1 2 3 5 4
氣泡排序:(n-1)+(n-2)
插入排序:n
3.3.2 快速排序
基本思想:
通過一趟排序將待排記錄分隔成獨立的兩部分,其中一部分記錄的關鍵字均比另一部分的關鍵字小,則可分別對這兩部分記錄繼續進行排序,以達到整個序列有序。
遞迴實現:
//遞迴實現
void QuickSort(int* array, int left, int right)
{
if (left >= right)
return;
/*
//小區間優化
if (right - left + 1 < 5)//16
{
InsertSort(array + left, right - left + 1);
return;
}
*/
int div = PartSort1/PartSort2/PartSort3/PartSort4(array, left, right);//快排分開的位置
QuickSort(array, left, div - 1);//[left,div-1]
QuickSort(array, div + 1, right);//[div+1,right]
}非遞迴實現:
#include <stack>
//非遞迴
void QuickSortNor(int* array, int left, int right)
{
stack<int> s;
s.push(right);
s.push(left);
while (!s.empty())
{
int begin = s.top();
s.pop();
int end = s.top();
s.pop();
int div = PartSort1/PartSort2/PartSort3/PartSort4(array, begin, end);
if (begin < div - 1)
{
s.push(div - 1);
s.push(begin);
}
if (div + 1 < end)
{
s.push(end);
s.push(div + 1);
}
}
}快排分開位置的幾種方法:
1.begin找大,end找小
int PartSort1(int* array, int begin, int end)
{
int& key = array[end];//將最後一個元素作為中間元素
while (begin < end)
{
while (begin < end && array[begin] <= key)//注意:等號的情況得考慮進去,防止第一個元素與最後一個元素相等
++begin;
while (begin < end && array[end] >= key)
--end;
swap(array[begin], array[end]);
}
swap(array[begin], key);
return begin;
}//優化
//三數取中---獲取中間元素的下標
int GetMidIndex(int* array, int begin, int end)
{
int mid = begin + ((end - begin) >> 1);
//begin mid
if (array[mid] > array[begin])
{
if (array[end] > array[mid])//begin mid end
return mid;
else if (array[end] > array[begin])//begin end mid
return end;
else
return begin;
}
//mid begin
else
{
if (array[end] < array[mid])//end mid begin
return mid;
else if (array[end] >array[begin])//mid begin end
return begin;
else
return end;
}
}
2.左右指標法
int PartSort2(int* array, int begin, int end)
{
int mid = GetMidIndex(array, begin, end);
swap(array[mid], array[end]);
int& key = array[end];//將最後一個元素作為中間元素
while (begin < end)
{
while (begin < end && array[begin] <= key)//注意:等號的情況得考慮進去,防止第一個元素與最後一個元素相等
++begin;
while (begin < end && array[end] >= key)
--end;
swap(array[begin], array[end]);
}
swap(array[begin], key);
return begin;
}
3.挖坑法
int PartSort3(int* array, int begin, int end)
{
int& key = array[end];
while (begin < end)
{
while (array[begin] < key)
{
++begin;
}
array[end] = array[begin];//填坑
while (array[end] > key)
{
--end;
}
array[begin] = array[end];//填坑
}
array[begin] = key;
return begin;
}4.前後指標法
int PartSort4(int* array, int begin, int end)
{
int prev = begin - 1;
int cur = begin;
int key = array[end];
while (cur < end)
{
if (array[cur] < key&&++prev != cur)//cur找小
swap(array[cur], array[prev]);//交換,小的放左,大的放右
++cur;
}
swap(array[++prev], array[end]);
return prev;
}3.4 歸併排序
基本思想:
基本思想:將待排序的元素序列分成兩個長度相等的子序列,為每一個子序列排序,然後將他們合併成一個序列。合併兩個子序列的過程稱為兩路歸併。
動畫實現:
程式碼實現:
//時間複雜度:O(N*logN)
//空間複雜度:O(N)
//穩定性:穩定
#include <assert.h>
//[left,right]
void _MergeSort(int* array, int left, int right, int* tmp)
{
if (left >= right)
return;
int mid = left + ((right - left) >> 1);
//[left,mid] [mid+1,right] 均為有序區間
_MergeSort(array, left, mid, tmp);
_MergeSort(array, mid + 1, right, tmp);
int begin1 = left;
int end1 = mid;
int begin2 = mid + 1;
int end2 = right;
int index = left;
//從頭開始比較大小,小的放在新空間中,繼續往後走
while (begin1 <= end1 && begin2 <= end2)
{
if (array[begin1] < array[begin2])
tmp[index++] = array[begin1++];
else
tmp[index++] = array[begin2++];
}
//[begin2,end2]走完,將[begin1,end1]剩下的元素放入新空間中
while (begin1 <= end1)
{
tmp[index++] = array[begin1++];
}
while (begin2 <= end2)
{
tmp[index++] = array[begin2++];
}
memcpy(array + left, tmp + left, (right - left + 1)*sizeof(int));
}
void MergeSort(int* array, size_t size)
{
assert(array);
//開闢一個新空間
int* tmp = new int[size];
_MergeSort(array, 0, size - 1, tmp);
delete[] tmp;
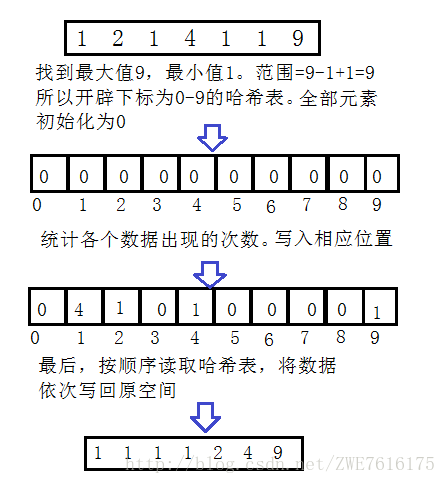
}3.5 計數排序
基本思想:
利用雜湊的方法,將每個資料出現的次數都統計下來。雜湊表是順序的,所以我們統計完後直接遍歷雜湊表,將資料再重寫回原資料空間就可以完成排序。
動畫實現:
程式碼實現:
//時間複雜度:O(N+資料範圍)
//空間複雜度:O(最大數-最小數)
//場景:正整數排序
void CountSort(int* array, size_t size)
{
//計算相對位置
int min = array[0];
int max = array[0];
for (size_t i = 0; i < size; ++i)
{
if (array[i] < min)
min = array[i];
if (array[i] > max)
max = array[i];
}
int range = max - min + 1;
int* counts = new int[range];
memset(counts, 0, range*sizeof(int));
for (size_t i = 0; i < size; ++i)
{
counts[array[i] - min]++;//相對位置
}
//藉助counts陣列將元素放入原空間中
int j = 0;
for (size_t i = 0; i < range; ++i)
{
while (counts[i]--)
{
array[j++] = i + min;
}
}
//釋放輔助空間
delete[] counts;
}3.6 基數排序
基本思想:
基數排序是按照低位先排序,然後收集;再按照高位排序,然後再收集;依次類推,直到最高位。有時候有些屬性是有優先順序順序的,先按低優先順序排序,再按高優先順序排序。最後的次序就是高優先順序高的在前,高優先順序相同的低優先順序高的在前。基數排序基於分別排序,分別收集,所以是穩定的。
①LSD–Least Significant Digit first 從低位(個位)向高位排。
②MSD– Most Significant Digit first 從高位向低位(個位)排。
動畫實現:

程式碼實現:
//LSD(先排低位) MSD(先排高位)
//時間複雜度:O(N*基數)
//空間複雜度:O(N)
//場景:正整數排序
void LSDSort(int* array, size_t size)
{
//統計資料中最大數的位數
int digits = 1;//至少是個位數
int base = 10;
for (size_t i = 0; i < size; ++i)
{
while (array[i] >= base)
{
++digits;
base *= 10;
}
}
int* buckets = new int[size];//開闢臨時空間
base = 1;
for (size_t i = 0; i < digits; ++i)
{
//0~9號桶中存放資料的個數
int counts[10] = { 0 };
for (size_t i = 0; i < size; ++i)
{
int num = (array[i]/base) % 10;
counts[num]++;
}
//0~9號桶第一個資料的起始位置
int starts[10] = { 0 };
for (size_t i = 1; i < 10; ++i)
{
starts[i] = starts[i - 1] + counts[i - 1];
}
for (size_t i = 0; i < size; ++i)
{
int num = (array[i] / base) % 10;//個位是幾,num表示幾號桶
int index = starts[num]++;//每放入一個數據在桶裡,就給起始位置++
buckets[index] = array[i];//將資料放入桶中
}
memcpy(array, buckets, sizeof(int)*size);
base *= 10;
}
delete[] buckets;
}測試程式碼:
void test()
{
int array[] = { 3, 4, 1, 5, 8, 6, 9, 0 };
//InsertSort(array, sizeof(array) / sizeof(array[0]));
//InsertSort_OP(array, sizeof(array) / sizeof(array[0]));
//ShellSort(array, sizeof(array) / sizeof(array[0]));
//SelectSort(array, sizeof(array) / sizeof(array[0]));
//HeapSort(array, sizeof(array) / sizeof(array[0]));
//BubbleSort(array, sizeof(array) / sizeof(array[0]));
//QuickSort(array, 0, sizeof(array) / sizeof(array[0]) - 1);
//QuickSortNor(array, 0, sizeof(array) / sizeof(array[0]) - 1);
//MergeSort(array, sizeof(array) / sizeof(array[0]));
//CountSort(array, sizeof(array) / sizeof(array[0]));
LSDSort(array, sizeof(array) / sizeof(array[0]));
Print(array, sizeof(array) / sizeof(array[0]));
}