
Dot 與 GraphViz 經驗總結
阿新 • • 發佈:2019-02-16
reference
ubuntu
注:本人僅在ubuntu上進行了測試
安裝
- sudo apt-get install graphviz
在ubuntu16.04上就這樣安裝好了,從原始碼上安裝失敗,少了scan.c,反正能用,所以不管了。
使用
- dot -Tjpg example.dot -oexample.jpg
- example.dot
graph graphname{
a--b;
b--c;
b--d;
d--a;
}- 指明輸出格式為jpg, -Tjpg, 所有輸出格式
- 指明輸出檔名為example.jpg -oexample.jpg
- example.jpg
An Ugly Tool and A nice Plugin
- DotEditor: 編輯功能極弱,用法是用別的編輯器進行dot檔案編輯,再複製到DotEditor中進行顯示。
- [gedit plugin external tool]:自定義功能極強,可結合gedit 的編輯能力,非常好用。在下面的指令碼和圖示配置下,按
F5即可顯示dot影象。
#!/bin/sh
format=jpg
fin=${GEDIT_CURRENT_DOCUMENT_NAME}
fout=${GEDIT_CURRENT_DOCUMENT_NAME}.${format}
touch ${fout}
echo 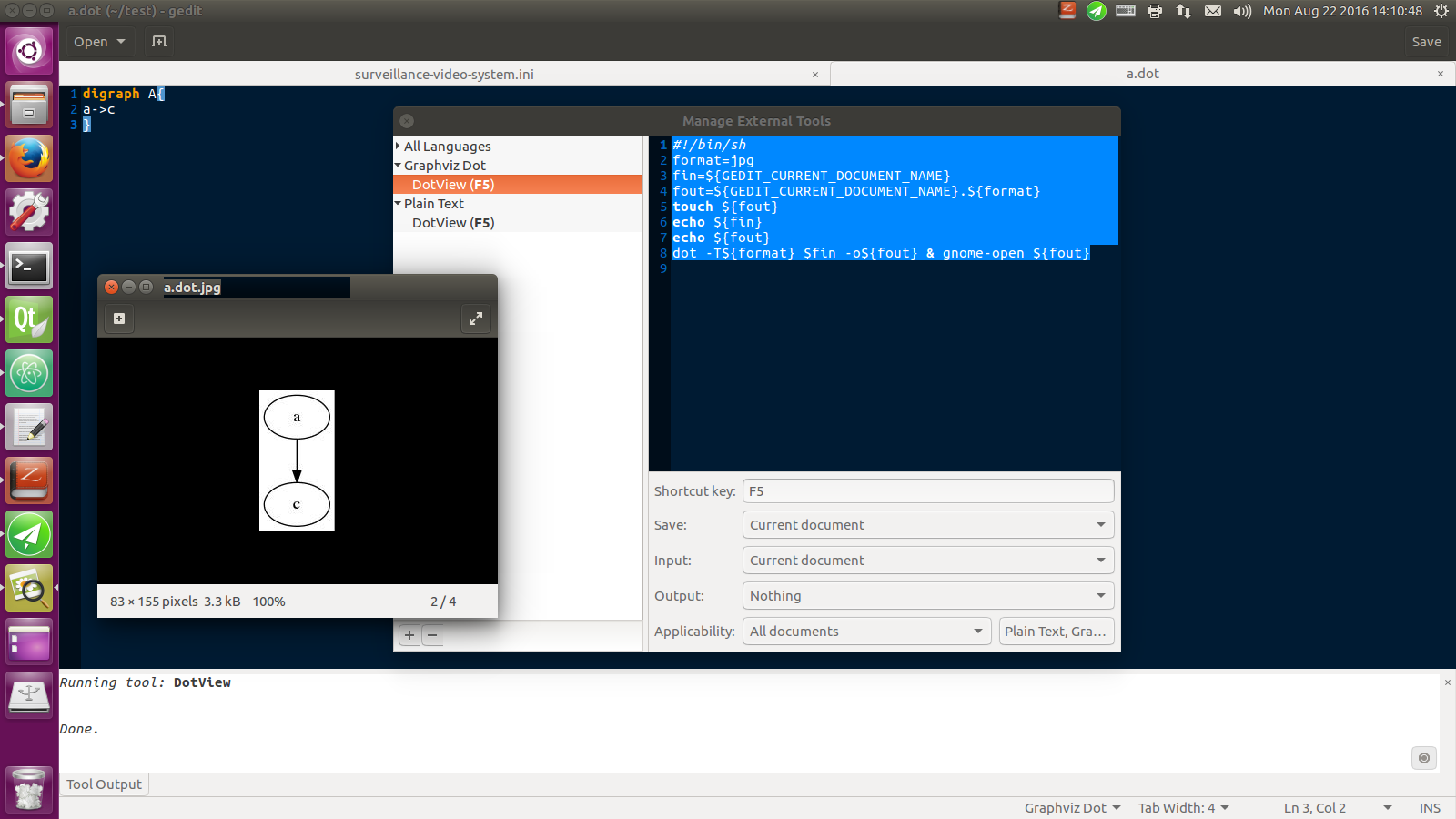
High Level Summary
- for subgraph, the
cluster_i(i=0,1,2,…) is special - we can use
{...}to set local environment - set node
node [style=filled,color=lightpink]; - set edge
a->b [label='...'] - use set
{a,b,c}->c; a->{b,c,d} - set edge direction
edge [dir=both/none/forward/back;penwidth=3],digraph,graph - set graph direction
rankdir="TB", "LR", "BT", "RL" - for color
node [style=filled,color=lightyellow];see color gallery
digraph G {
subgraph Ncluster_0 {
style=filled;
color=lightgrey;
node [style=filled,color=lightgray];
start -> "motion detection" -> "connected component analysis" -> "small area filter" -> "object feature extraction" -> "object association" -> "association graph" -> "find min tree";
class -> "IBGS.process()" -> "icvprCcaByTwoPass()" -> "QYzbxTrackingFeature.getObjectsFromMask()" -> "QYzbxTrackingFeature.getObjects()" -> "TrackingObjectAssociation.adjecentObjectAssociation()" -> "TrackingObjectAssociation.process()" -> "MotionBasedTracker.objectTracking()";
data -> "image:CV_8UC3" -> "mask:CV_8UC1" -> "vector<mask>" -> "vector<ObjectFeature>" -> "list<FrameFeature>" ->"DirectGraph"->"tracking record";
label="2016/08/20: Connected Component Analysis"
}
subgraph Ncluster_1 {
style=filled
color=blue
node [style=filled,color=lightpink];
"motion detection" -> "contour analysis" -> "kalman filter" -> "hungrian algorithm" -> "trakcking result"
data -> "image:CV_8UC3" -> "mask:CV_8UC1" -> "contour:vector<Point>" -> "vector<trackingObjectFeature>" -> "MultiObjectTracker:vector<singleObjectTracker>"
label="2016/08/22: findContour"
}
subgraph Ncluster_2 {
style=filled
color=red
node [style=filled,color=lightyellow];
"motion detection" -> "blob detection" -> "kalman filter" -> "hungrian algorithm" -> "trakcking result"
data -> "image:CV_8UC3" -> "mask:CV_8UC1" -> "blob feature" -> "vector<trackingObjectFeature>" -> "MultiObjectTracker:vector<singleObjectTracker>"
label="2016/08/23: blob detector"
}
}
digraph G{
{node[style=filled,color=lightyellow]
input
"QString:configFile"
"QString:videoFile"
"TrackingStatus*:status"
}
{node[style=filled,color=lightpink]
function
"void:process()"
"void:processOne()"
"vector<trackingObjectFeature>:getObjects()"
"void:Tracking()"
"void:run()"
"void:stop()"
}
{node[style=filled,color=lightblue]
explain
"show tracking result"
"init singleObjectTracker"
"update singleObjectTracker"
}
{"QString:configFile","QString:videoFile"}->"void:process()"
"void:process()"->{"Mat:img_input","Mat:img_foreground","Mat:img_background"}
"void:process()"->"void:processOne()"->"vector<trackingObjectFeature>:getObjects()"->"vector<trackingObjectFeature>"->"void:Tracking()"
"void:Tracking()"->"init singleObjectTracker"->"update singleObjectTracker"[label="kalman and hungrian"]
"void:processOne()"->"show tracking result"
"void:process()"->"void:run()"
{"Mat:img_input","Mat:img_foreground","Mat:img_background","TrackingStatus*:status"}->"void:processOne()"
{edge [dir=both;penwidth=3]
"TrackingStatus*:status"->"TrackingStatus*:globalTrackingStatus"[label="always equal to"]
{"TrackingStatus*:globalTrackingStatus","bool:globalStop"}->"void:run()"
"void:process()"->"TrackingStatus*:status"
}
"void:stop()"->"bool:globalStop"
}