
壓縮感知重構演算法之CoSaMP演算法python實現
阿新 • • 發佈:2019-02-19
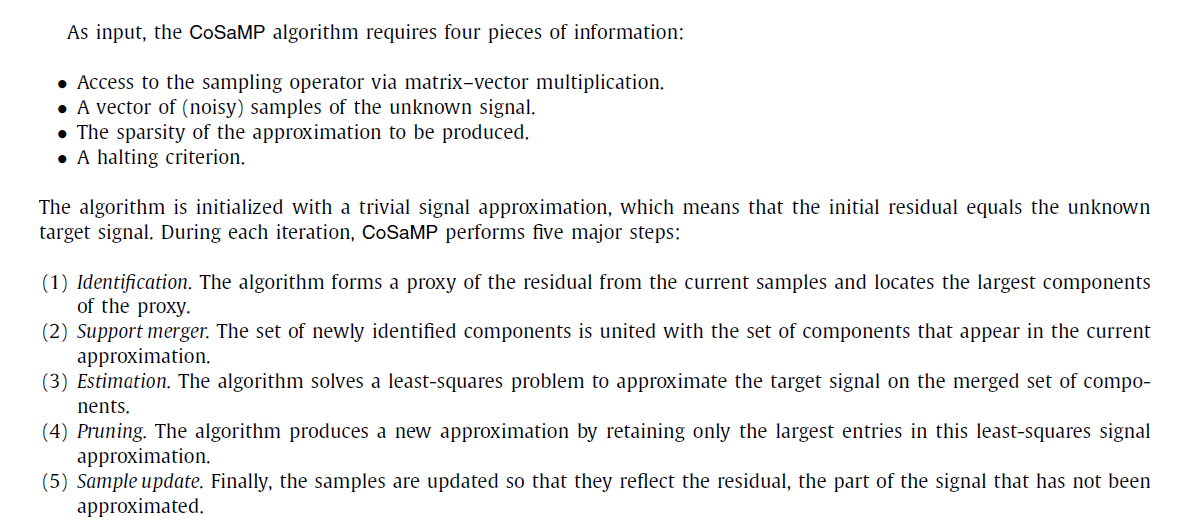
演算法流程
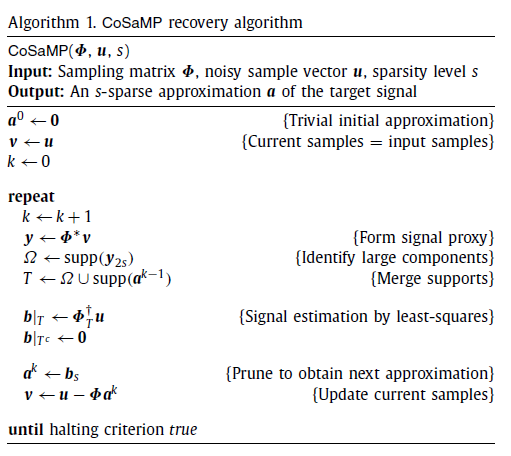
演算法分析
python程式碼
要利用python實現,電腦必須安裝以下程式
- python (本文用的python版本為3.5.1)
- numpy python包(本文用的版本為1.10.4)
- scipy python包(本文用的版本為0.17.0)
- pillow python包(本文用的版本為3.1.1)
#coding:utf-8
#%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
# DCT基作為稀疏基,重建演算法為CoSaMP演算法,影象按列進行處理
# 參考文獻: D. Deedell andJ. Tropp, “COSAMP: Iterative Signal Recovery from
#Incomplete and Inaccurate Samples,” 2008. matlab程式碼
function Demo_CS_CoSaMP()
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
% the DCT basis is selected as the sparse representation dictionary
% instead of seting the whole image as a vector, I process the image in the
% fashion of column-by-column, so as to reduce the complexity.
% Author: Chengfu Huo, roy@mail.ustc.edu.cn, http://home.ustc.edu.cn/~roy
% Reference: D. Deedell andJ. Tropp, “COSAMP: Iterative Signal Recovery from
% Incomplete and Inaccurate Samples,” 2008.
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
%------------ read in the image --------------
img=imread('lena.bmp'); % testing image
img=double(img);
[height,width]=size(img);
%------------ form the measurement matrix and base matrix ---------------
Phi=randn(floor(height/2),width); % only keep one third of the original data
Phi = Phi./repmat(sqrt(sum(Phi.^2,1)),[floor(height/2),1]); % normalize each column
mat_dct_1d=zeros(256,256); % building the DCT basis (corresponding to each column)
for k=0:1:255
dct_1d=cos([0:1:255]'*k*pi/256);
if k>0
dct_1d=dct_1d-mean(dct_1d);
end;
mat_dct_1d(:,k+1)=dct_1d/norm(dct_1d);
end
%--------- projection ---------
img_cs_1d=Phi*img; % treat each column as a independent signal
%-------- recover using omp ------------
sparse_rec_1d=zeros(height,width);
Theta_1d=Phi*mat_dct_1d;
for i=1:width
column_rec=cs_cosamp(img_cs_1d(:,i),Theta_1d,height);
sparse_rec_1d(:,i)=column_rec'; % sparse representation
end
img_rec_1d=mat_dct_1d*sparse_rec_1d; % inverse transform
%------------ show the results --------------------
figure(1)
subplot(2,2,1),imagesc(img),title('original image')
subplot(2,2,2),imagesc(Phi),title('measurement mat')
subplot(2,2,3),imagesc(mat_dct_1d),title('1d dct mat')
psnr = 20*log10(255/sqrt(mean((img(:)-img_rec_1d(:)).^2)));
subplot(2,2,4),imshow(uint8(img_rec_1d));
title(strcat('PSNR=',num2str(psnr),'dB'));
disp('over')
%************************************************************************%
function hat_x=cs_cosamp(y,T_Mat,m)
% y=T_Mat*x, T_Mat is n-by-m
% y - measurements
% T_Mat - combination of random matrix and sparse representation basis
% m - size of the original signal
% the sparsity is length(y)/4
n=length(y); % length of measurements
s=floor(n/4); % sparsity
r_n=y; % initial residuals
sig_pos_lt=[]; % significant pos for last time iteration
for times=1:s % number of iterations
product=abs(T_Mat'*r_n);
[val,pos]=sort(product,'descend');
sig_pos_cr=pos(1:2*s); % significant pos for curretn iteration
sig_pos=union(sig_pos_cr,sig_pos_lt);
Aug_t=T_Mat(:,sig_pos); % current selected entries of T_Mat
aug_x_cr=zeros(m,1);
aug_x_cr(sig_pos)=(Aug_t'*Aug_t)^(-1)*Aug_t'*y; % temp recovered x (sparse)
[val,pos]=sort(abs(aug_x_cr),'descend');
hat_x=zeros(1,m);
hat_x(pos(1:s))=aug_x_cr(pos(1:s));% recovered x with s sparsity
sig_pos_lt=pos(1:s); % refresh the significant positions
r_n=y-T_Mat*hat_x';
end
參考文獻
1、D. Deedell andJ. Tropp, “COSAMP: Iterative Signal Recovery from Incomplete and Inaccurate Samples,” 2008.
歡迎python愛好者加入:學習交流群 667279387