
作為無人機方面做嵌入式編寫的飛控總結6--IMU慣性系統和GPS導航系統融合小結2(組合導航演算法)
導:
3.基本理論:組合導航定義,想說的都在文獻之中...重點關注紅色下劃線處
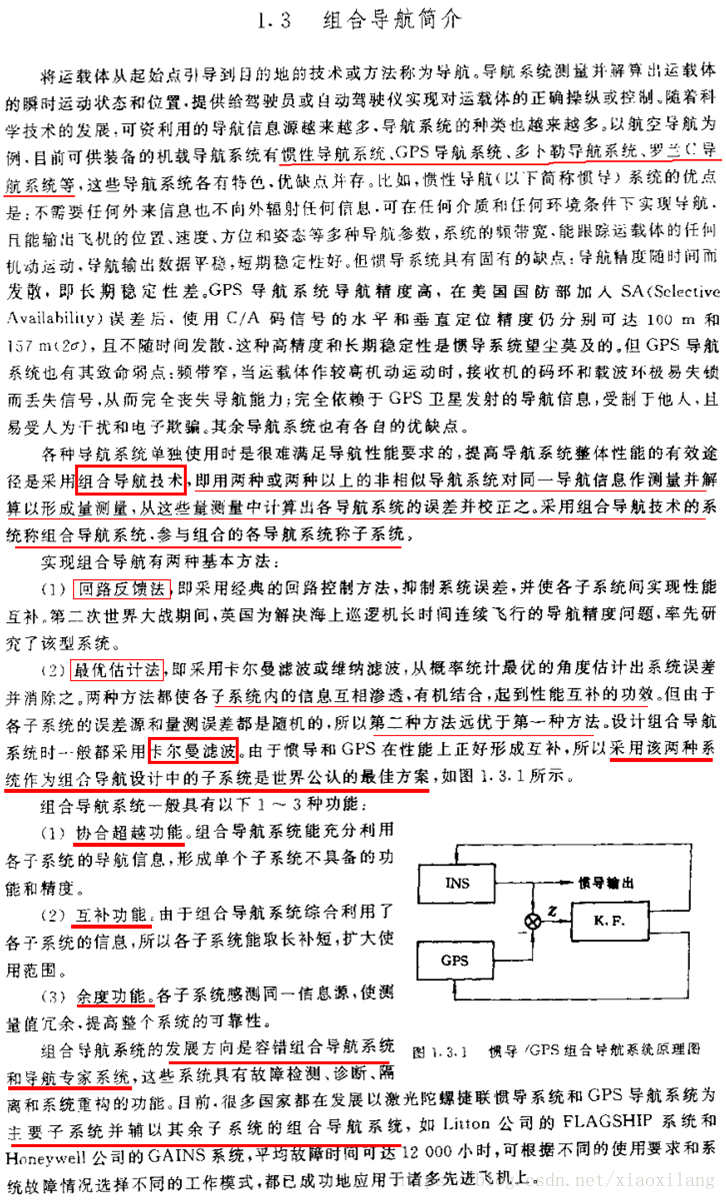
小結:慣性系統和GPS導航系統各有優缺點,但在誤差傳播效能上正好是互補的,前者長期穩定性差,但短期穩定性好,而後者正好相反;組合導航技術是指使用兩種或兩種以上的不同導航系統對同一資訊源作測量,從這些測量值的比較值中提取出各系統的誤差並校正之。採用組合導航技術的系統稱為組合導航系統。參與組合豹各導航系統稱為子系統。注意: 由於慣導系統具有自主性、隱蔽性、資訊的全面性和寬頻帶等特有優點,所以一般都以慣導系統作為組合導航系統的關鍵子系統;由於慣導系統和GPS導航系統效能互補,所以,以該兩子系統構造出組合導航系統是目前導航研究的熱點。
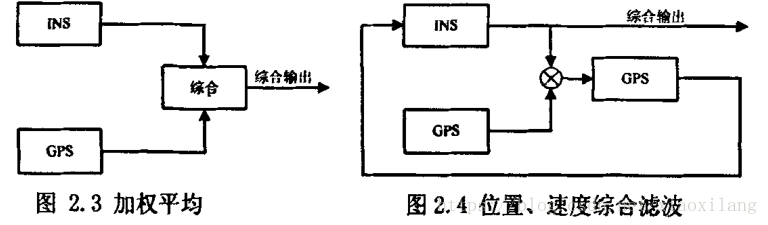
4.分類
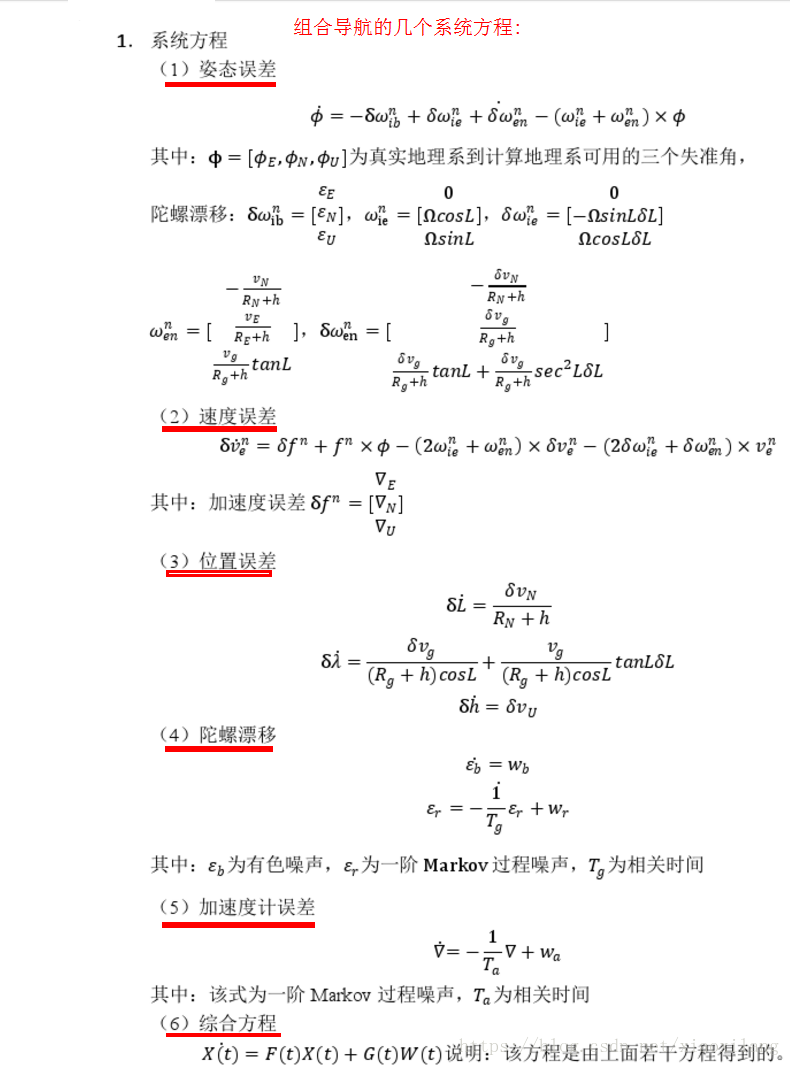
5 方程分析
(1)組合導航的系統建立
首先需建立以慣導系統誤差方程為基礎的組合導航系統狀態方程,並在組合導航系統誤差方程的基礎上建立組合導航系統的量測方程。採用卡爾曼濾波器為餒導系統誤差提供最小方差估計,然後利用這些誤差的估計值去修正慣導系統,以減少導航誤差.同時,經過校正後的慣導系統又可以提供導航資訊,以輔助GPS系統提高其效能和可靠性。
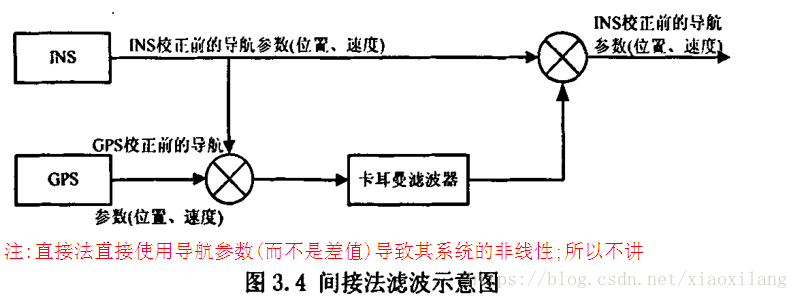
間接法,估計狀態的誤差,可以使濾波方程化為線性。其實,每個系統的真值在卡爾曼濾波器的觀測量中已經被對消,此時系統方程和量測方程一般都是線性的,採用線性卡爾曼濾波器即可。
因此,只需建立GPS誤差和慣導系統誤差模型就可以了.而且間接法估計過程是與原系統無關的獨立過程.對原系統來說,除了接受誤差估計的校正外,也保持工作的獨立性,這能發揮各個系統的特點。所以通常採用間接法方案。
誤差方程為變係數微分方程,一般包括速度誤差微分方程、經緯度誤差微分方程以及三個平臺誤差角微分方程等。本文采取問接法實現卡爾曼濾波處理,取系統的誤差作為狀態。
(2)狀態方程
1)INS的狀態方程
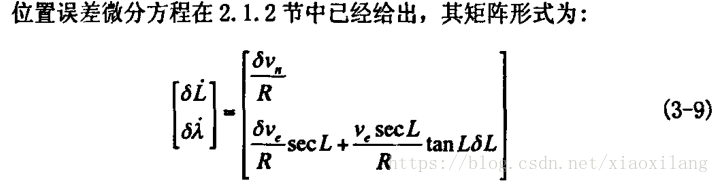
位置誤差方程
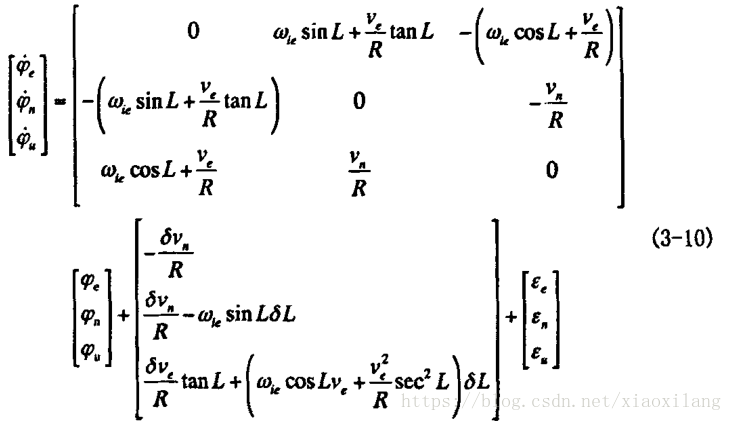
平臺誤差角方程
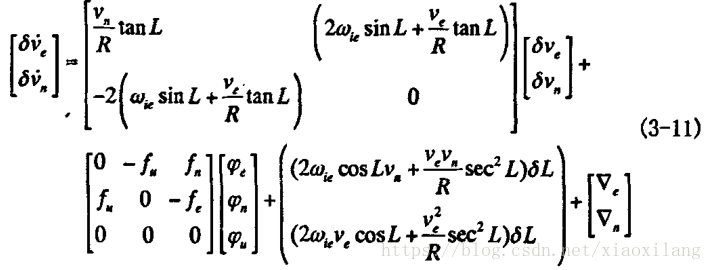
速度誤差方程
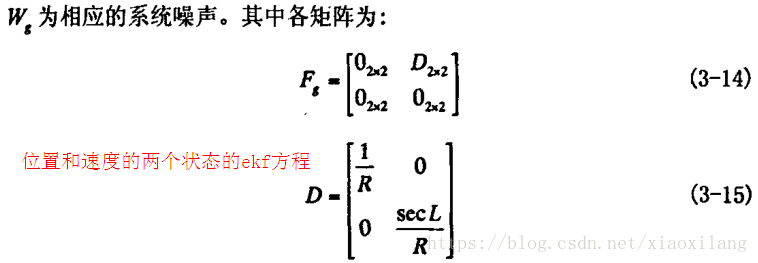
2).GPS的誤差狀態方程
定常速度情況下的系統模型。GPS的誤差狀態類似於INS系統,選位置誤差和速度誤差作為狀態變。


對於分散式組合,有兩個卡爾曼濾波器分別處理INS和GPS的資料,兩個濾波器的誤差狀態方程單獨建立。對於全組合方式,只有一個卡爾曼濾波器,組合系統的誤差狀態方程除了有INS的15個狀態變數,是否需要增加有關的誤差狀態變數,‘要根據被觀測修正資訊的選擇來決定。
由於本文中選取位置、速度為觀測資訊,而GPS接收機的位置和速度誤差一般是時間相關的,所以是有色噪聲,建模困難,不能用狀態擴充法加以處理,只能增加迭代週期。
綜上所述組合導航系統中不增加GPS的狀態變數。
===============枯燥理論的結束分割線====================================
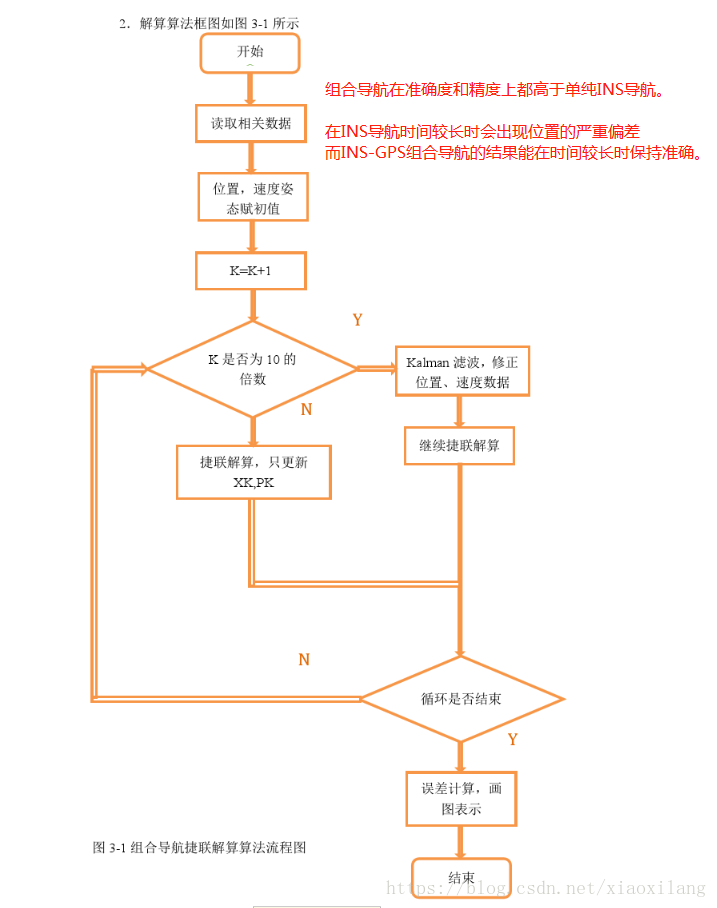
6.程式碼和流程分析
基本思路:用GP$和慣導輸出的位置和速度資訊的差值作為量測值,經卡爾曼濾波,估計慣導系統的誤差,然後對慣導系統進行校正。
1.擴充套件卡爾曼濾波 ~~~~