
程式碼解讀 | VINS 視覺前端
本文作者是計算機視覺life公眾號成員蔡量力,由於格式問題部分內容顯示可能有問題,更好的閱讀體驗,請檢視原文連結:程式碼解讀 | VINS 視覺前端
vins前端概述
在搞清楚VINS前端之前,首先要搞清楚什麼是SLAM前端?
SLAM的前端、後端系統本身沒有特別明確的劃分,但是在實際研究中根據處理的先後順序一般認為特徵點提取和跟蹤為前端部分,然後利用前端獲取的資料進行優化、迴環檢測等操作,從而將優化、迴環檢測等作為後端。
而在VINS_MONO中將視覺跟蹤模組(feature_trackers)為其前端。在視覺跟蹤模組中,首先,對於每一幅新影象,KLT稀疏光流演算法對現有特徵進行跟蹤。然後,檢測新的角點特徵以保證每個影象特徵的最小數目,並設定兩個相鄰特徵之間畫素的最小間隔來執行均勻的特徵分佈。接著,將二維特徵點去畸變,然後在通過外點剔除後投影到一個單位球面上。最後,利用基本矩陣模型的RANSAC演算法進行外點剔除。
VINS_MONO原文中還將關鍵幀的選取作為前端分,本文暫不討論, 後續文章會詳細介紹。
VINS-Mono將前端封裝為一個ROS節點,該節點的實現在feature_tracker目錄下的src中,src裡共有3個頭檔案和3個原始檔:
feature_tracker_node.cpp構造了一個ROS節點feature_tracker_node,該節點訂閱相機影象話題資料後,提取特徵點,然後用KLT光流進行特徵點跟蹤。feature_tracker節點將跟蹤的特徵點作為話題進行釋出,供後端ROS節點使用。同時feature_tracker_node還會發布標記了特徵點的圖片,可供Rviz顯示以供除錯。如下表所示:
操作 話題 訊息型別 功能 Subscribe image sensor_msgs::ImageConstPtr 訂閱原始影象,傳給回撥函式 Publish feature sensor_msgs::PointCloud 跟蹤的特徵點,供後端優化使用 Publish feature_img sensor_msgs::Image 跟蹤特徵點圖片,輸出給RVIZ,除錯用 feature_tracker.h和feature_tracker.cpp實現了一個類FeatureTracker,用來完成特徵點提取和特徵點跟蹤等主要功能,該類中主要函式和實現的功能如下:
函式 功能 bool inBorder() 判斷跟蹤的特徵點是否在影象邊界內 void reduceVector() 去除無法跟蹤的特徵點 void FeatureTracker::setMask() 對跟蹤點進行排序並去除密集點 void FeatureTracker::addPoints() 添將新檢測到的特徵點n_pts void FeatureTracker::readImage() 對影象使用光流法進行特徵點跟蹤 void FeatureTracker::rejectWithF() 利用F矩陣剔除外點 bool FeatureTracker::updateID() 更新特徵點id void FeatureTracker::readIntrinsicParameter() 讀取相機內參 void FeatureTracker::showUndistortion() 顯示去畸變矯正後的特徵點 void FeatureTracker::undistortedPoints() 對角點進行去畸變矯正,並計算每個角點的速度 tic_toc.h中是作者自己封裝的一個類TIC_TOC,用來計時;
parameters.h和parameters.cpp處理前端中需要用到的一些引數;
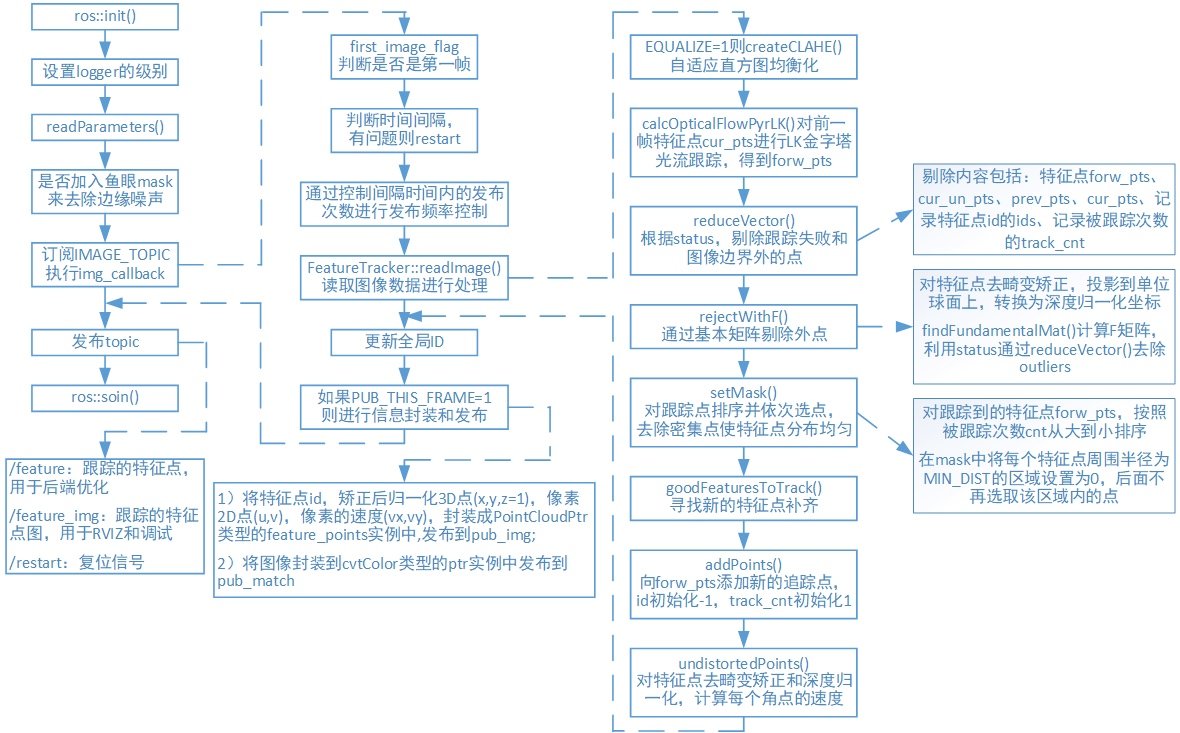
流程圖
程式碼解讀
feature_tracker_node系統入口main() 函式:
ROS初始化和輸出除錯資訊:
//ros初始化和設定控制代碼 ros::init(argc, argv, "feature_tracker"); ros::NodeHandle n("~"); //設定logger的級別。 只有級別大於或等於level的日誌記錄訊息才會得到處理。 ros::console::set_logger_level(ROSCONSOLE_DEFAULT_NAME, ros::console::levels::Info);讀取配置引數:
//讀取config->euroc->euroc_config.yaml中的一些配置引數 readParameters(n);讀取相機內參讀取每個相機對應內參,單目時NUM_OF_CAM=1:
for (int i = 0; i < NUM_OF_CAM; i++) trackerData[i].readIntrinsicParameter(CAM_NAMES[i]);判斷是否加入魚眼mask來去除邊緣噪聲
訂閱話題IMAGE_TOPIC,當有影象進來的時候執行回撥函式:
ros::Subscriber sub_img = n.subscribe(IMAGE_TOPIC, 100, img_callback);將處理完的影象資訊用PointCloud例項feature_points和Image的例項ptr訊息型別,釋出到"feature"和"feature_img"的topic
pub_img = n.advertise<sensor_msgs::PointCloud>("feature", 1000); pub_match = n.advertise<sensor_msgs::Image>("feature_img",1000); pub_restart = n.advertise<std_msgs::Bool>("restart",1000);
回撥函式imf_callback
判斷是否為第一幀,若為第一幀,將該幀的時間賦給 first_image_time和last_image_time ,然後返回
if(first_image_flag) { first_image_flag = false; first_image_time = img_msg->header.stamp.toSec();//記錄影象幀的時間 last_image_time = img_msg->header.stamp.toSec(); return; }通過判斷時間間隔,有問題則restart
if (img_msg->header.stamp.toSec() - last_image_time > 1.0 || img_msg->header.stamp.toSec() < last_image_time)釋出頻率控制(不是每來一張影象都要釋出,但是都要傳入readImage()進行處理),保證每秒鐘處理的影象不超過FREQ,此處為每秒10幀
if (round(1.0 * pub_count / (img_msg->header.stamp.toSec() - first_image_time)) <= FREQ) { PUB_THIS_FRAME = true; // 時間間隔內的釋出頻率十分接近設定頻率時,更新時間間隔起始時刻,並將資料釋出次數置0 if (abs(1.0 * pub_count / (img_msg->header.stamp.toSec() - first_image_time) - FREQ) < 0.01 * FREQ) { first_image_time = img_msg->header.stamp.toSec(); pub_count = 0; } } else PUB_THIS_FRAME = false;將影象編碼8UC1轉換為mono8
處理圖片:readImage()
判斷是否顯示去畸變矯正後的特徵點
更新全域性ID,將新提取的特徵點賦予全域性id
for (unsigned int i = 0;; i++) { bool completed = false; for (int j = 0; j < NUM_OF_CAM; j++) if (j != 1 || !STEREO_TRACK) completed |= trackerData[j].updateID(i); if (!completed) break; }將特徵點id,矯正後歸一化平面的3D點(x,y,z=1),畫素2D點(u,v),畫素的速度(vx,vy),封裝成sensor_msgs::PointCloudPtr型別的feature_points例項中,釋出到pub_img,將影象封裝到cv_bridge::cvtColor型別的ptr例項中釋出到pub_match
釋出訊息的資料:
pub_img.publish(feature_points)
pub_match.publish(ptr->toImageMsg())
readimage()
判斷EQUALIZE的值,決定是否對影象進行直方圖均衡化處理:createCLAHE()
若為第一次讀入圖片,則:prev_img = cur_img = forw_img = img;若不是第一幀,則:forw_img = img,其中cur_img 和 forw_img 分別是光流跟蹤的前後兩幀,forw_img 才是真正的當前幀,cur_img 實際上是上一幀,prev_img 是上一次釋出的幀。
prev_img = cur_img = forw_img = img;//避免後面使用到這些資料時,它們是空的呼叫 cv::calcOpticalFlowPyrLK()進行光流跟蹤,跟蹤前一幀的特徵點 cur_pts 得到 forw_pts,根據 status 把跟蹤失敗的點剔除(注意 prev, cur, forw, ids, track_cnt都要剔除),而且還需要將跟蹤到影象邊界外的點剔除。
cv::calcOpticalFlowPyrLK(cur_img, forw_img, cur_pts, forw_pts, status, err, cv::Size(21, 21), 3);判斷是否需要釋出該幀影象:
否(PUB_THIS_FRAME=0):當前幀 forw 的資料賦給上一幀 cur,然後在這一步就結束了。
是(PUB_THIS_FRAME=0):
呼叫rejectWithF()對prev_pts和forw_pts做RANSAC剔除outlier,函式裡面主要是呼叫了cv::findFundamentalMat() 函式,然後將然後所有剩下的特徵點的 track_cnt 加1,track_cnt數值越大,說明被追蹤得越久。
void FeatureTracker::rejectWithF() { if (forw_pts.size() >= 8) { ROS_DEBUG("FM ransac begins"); TicToc t_f; vector<cv::Point2f> un_cur_pts(cur_pts.size()), un_forw_pts(forw_pts.size()); for (unsigned int i = 0; i < cur_pts.size(); i++) { Eigen::Vector3d tmp_p; //根據不同的相機模型將二維座標轉換到三維座標 m_camera->liftProjective(Eigen::Vector2d(cur_pts[i].x, cur_pts[i].y), tmp_p); //轉換為歸一化畫素座標 tmp_p.x() = FOCAL_LENGTH * tmp_p.x() / tmp_p.z() + COL / 2.0; tmp_p.y() = FOCAL_LENGTH * tmp_p.y() / tmp_p.z() + ROW / 2.0; un_cur_pts[i] = cv::Point2f(tmp_p.x(), tmp_p.y()); m_camera->liftProjective(Eigen::Vector2d(forw_pts[i].x, forw_pts[i].y), tmp_p); tmp_p.x() = FOCAL_LENGTH * tmp_p.x() / tmp_p.z() + COL / 2.0; tmp_p.y() = FOCAL_LENGTH * tmp_p.y() / tmp_p.z() + ROW / 2.0; un_forw_pts[i] = cv::Point2f(tmp_p.x(), tmp_p.y()); } vector<uchar> status; //呼叫cv::findFundamentalMat對un_cur_pts和un_forw_pts計算F矩陣 cv::findFundamentalMat(un_cur_pts, un_forw_pts, cv::FM_RANSAC, F_THRESHOLD, 0.99, status); int size_a = cur_pts.size(); reduceVector(prev_pts, status); reduceVector(cur_pts, status); reduceVector(forw_pts, status); reduceVector(cur_un_pts, status); reduceVector(ids, status); reduceVector(track_cnt, status); ROS_DEBUG("FM ransac: %d -> %lu: %f", size_a, forw_pts.size(), 1.0 * forw_pts.size() / size_a); ROS_DEBUG("FM ransac costs: %fms", t_f.toc()); } }呼叫setMask()函式,先對跟蹤到的特徵點 forw_pts 按照跟蹤次數降序排列(認為特徵點被跟蹤到的次數越多越好),然後遍歷這個降序排列,對於遍歷的每一個特徵點,在 mask中將該點周圍半徑為 MIN_DIST=30 的區域設定為 0,在後續的遍歷過程中,不再選擇該區域內的點。
在mask中不為0的區域,呼叫goodFeaturesToTrack提取新的角點n_pts,通過addPoints()函式push到forw_pts中,id初始化-1,track_cnt初始化為1(由於跟蹤過程中,上一幀特徵點由於各種原因無法被跟蹤,而且為了保證特徵點均勻分佈而剔除了一些特徵點,如果不補充新的特徵點,那麼每一幀中特徵點的數量會越來越少)。
cv::goodFeaturesToTrack(forw_img, n_pts, MAX_CNT - forw_pts.size(), 0.01, MIN_DIST, mask);
呼叫undistortedPoints() 函式根據不同的相機模型進行去畸變矯正和深度歸一化,計算速度。
reference
https://github.com/QingSimon/VINS-Mono-code-annotation/blob/master/VINS-Mono%E8%AF%A6%E8%A7%A3.pdf
https://blog.csdn.net/wangshuailpp/article/details/78461171
https://blog.csdn.net/qq_41839222/article/details/85797156
https://qingsimon.github.io/post/
關注公眾號,點選“學習圈子”,“SLAM入門“”,從零開始學習三維視覺核心技術SLAM,3天內無條件退款。早就是優勢,學習切忌單打獨鬥,這裡有教程資料、練習作業、答疑解惑等,優質學習圈幫你少走彎路,快速入門!

推薦閱讀
如何從零開始系統化學習視覺SLAM?
從零開始一起學習SLAM | 為什麼要學SLAM?
從零開始一起學習SLAM | 學習SLAM到底需要學什麼?
從零開始一起學習SLAM | SLAM有什麼用?
從零開始一起學習SLAM | C++新特性要不要學?
從零開始一起學習SLAM | 為什麼要用齊次座標?
從零開始一起學習SLAM | 三維空間剛體的旋轉
從零開始一起學習SLAM | 為啥需要李群與李代數?
從零開始一起學習SLAM | 相機成像模型
從零開始一起學習SLAM | 不推公式,如何真正理解對極約束?
從零開始一起學習SLAM | 神奇的單應矩陣
從零開始一起學習SLAM | 你好,點雲
從零開始一起學習SLAM | 給點雲加個濾網
從零開始一起學習SLAM | 點雲平滑法線估計
從零開始一起學習SLAM | 點雲到網格的進化
從零開始一起學習SLAM | 理解圖優化,一步步帶你看懂g2o程式碼
從零開始一起學習SLAM | 掌握g2o頂點程式設計套路
從零開始一起學習SLAM | 掌握g2o邊的程式碼套路
從零開始一起學習SLAM | 用四元數插值來對齊IMU和影象幀
零基礎小白,如何入門計算機視覺?
SLAM領域牛人、牛實驗室、牛研究成果梳理
我用MATLAB擼了一個2D LiDAR SLAM
視覺化理解四元數,願你不再掉頭髮
最近一年語義SLAM有哪些代表性工作?
視覺SLAM技術綜述
彙總 | VIO、鐳射SLAM相關論文分類集錦
研究SLAM,對程式設計的要求有多高?
2018年SLAM、三維視覺方向求職經驗分享
2018年SLAM、三維視覺方向求職經驗分享
深度學習遇到SLAM | 如何評價基於深度學習的DeepVO,VINet,VidLoc?
AI資源對接需求彙總:第1期
AI資源對接需求彙總:第2期
AI資源對接需求彙總:第3