
ORB-SLAM2 執行 —— ROS + Android 手機攝像頭
轉載請註明出處,謝謝
原創作者:Mingrui
原創連結:https://www.cnblogs.com/MingruiYu/p/12404730.html
本文要點:
- ROS 配置安裝
- 解決
sudo rosdep init報錯Website may be down.
- 解決
- ORB-SLAM2 ROS 配置安裝
- 解決報錯
DSO missing from command line
- 解決報錯
- Android 手機攝像頭與 PC 進行基於 ROS 的通訊
- 手機攝像頭標定
- 採集標定影象
- OpenCV samples 相機標定例程
- 使用 Android 手機攝像頭,執行 ORB-SLAM2 ROS Mono
- 簡化啟動
- 使用 gnome-terminal,一個指令碼執行多個終端
寫在前面
最近研究 ORB-SLAM2,自然是想能自己實時跑一跑。但最近因為疫情只能待在家裡,身邊能當攝像頭的東西好像只有筆記本攝像頭和手機攝像頭。筆記本攝像頭不方便(特別是我的 matebook 14 這個在鍵盤上的彈出攝像頭,如想實現可參考),所以選擇使用手機攝像頭。ORB-SLAM2 官方提供了 ROS 的支援,再結合網上各路大佬提供的工具,最終實現了以 Android 手機攝像頭為輸入,基於 ROS 在 PC 上實時執行 ORB-SLAM2 Mono。本文將從零開始,介紹如何實現這一目標。
本文環境為:
- Ubuntu 18.04
- ROS Melodic
- Android 手機(MI 9 SE)
ROS 配置安裝
首先是 ROS 的配置安裝,參照 ROS 官方安裝教程,其中第一步使用國內映象:
sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.ustc.edu.cn/ros/ubuntu/ $DISTRIB_CODENAME main" > /etc/apt/sources.list.d/ros-latest.list'sudo rosdep init 出錯
安裝步驟中 sudo rosdep init 報錯:
ERROR: cannot download default sources list from: https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/sources.list.d/20-default.list Website may be down.
首先試一試在瀏覽器中能不能開啟,如果打不開的話,說明該網站需要翻。
因為在終端中安裝,所以光瀏覽器能翻不夠,還得配置終端翻。如果使用的是 ss 的話,終端還需要額外配置。配置方法可自行 google。
成功配置終端後,如果還報這個錯,則需要:
sudo c_rehash /etc/ssl/certs
sudo -E rosdep init之後再 rosdep update 就可以了。
學習教程
ROS-Tutorials
ORB-SLAM2 ROS 配置安裝
編譯
ORB-SLAM2 的配置安裝可見 raulmur/ORB_SLAM2。之前的博文 ORB-SLAM2 初體驗 —— 配置安裝 中介紹了不包括 ROS 支援的 ORB-SLAM2 配置安裝。包括 ROS 支援的配置安裝可見 raulmur/ORB_SLAM2#7-ros-examples:
在 ~/.bashrc 中新增 ORB-SLAM2 path 至 ROS_PACKAGE_PATH
# 開啟 ~/.bashrc
sudo gedit ~/.bashrc
# 新增
export ROS_PACKAGE_PATH=${ROS_PACKAGE_PATH}:PATH/ORB_SLAM2/Examples/ROS
# (注意修改 PATH 為自己 ORB-SLAM2 的目錄)NOTICE:
- ${ROS_PACKAGE_PATH}:和PATH之間不能有空格。
- 新增的位置要在之前新增的其它的 source 命令之後。
之後進行編譯:
cd PATH/ORB_SLAM2
chmod +x build_ros.sh
./build_ros.sh會報錯:DSO missing from command line
解決方法:ERROR while running ./build_ros.sh #535
執行
例如執行單目 ORB-SLAM2:
rosrun ORB_SLAM2 Mono PATH_TO_VOCABULARY PATH_TO_SETTINGS_FILE下文會詳細介紹如何執行。
Android 手機攝像頭與 PC 進行基於 ROS 的通訊
該實現基於 GitHub 上的一個專案:hitcm/Android_Camera-IMU,作者實現了將手機的攝像頭資訊和 IMU 資訊傳給 PC(可參考作者博文 ROS實時採集Android的影象和IMU資料)。本文中,我們只需使用攝像頭資訊。
git clone https://github.com/hitcm/Android_Camera-IMU.git
sudo apt-get install ros-melodic-imu-tools # 修改對應自己的 ROS 版本(本文中其實不需要)將 clone 下來的資料夾中已經編譯好的 apk 拷到 Android 手機上,在手機上安裝。並將 PC 和 Android 手機 置於同一區域網下。
執行方式:
PC Terminal 1: roscore
Android: 開啟應用,在 在 IP Port 中修改 IP 地址為 PC的 IP地址,port不需要修改(PC 的 IP 可在 PC 終端輸入 ifconfig 檢視),之後點選 Connect,連線成功則進入相機介面。
PC Terminal 2:
cd Android_Camera-IMU
roslaunch android_cam-imu.launch之後會彈出一個 Rviz 介面:
- 如果要實時顯示 image,需要 Add - By topic - 新增/camera/image_raw/image。
- 如果要顯示 imu,則需要 Add - By topic - 新增 imu,且在 Fix Frame 中 將 map 改為 imu。
手機攝像頭標定
為了 ORB-SLAM2 準確執行,需要對手機攝像頭進行標定。標定方式為:對棋盤格標定板進行各個方向的拍照,之後基於 OpenCV 進行標定。注意這裡採集的圖片需要和 ORB-SLAM2 程式讀取到的一致,所以不能直接使用手機自帶相機 app 拍照,因為手機會自動通過演算法進行校正,而上述通訊傳輸的是 raw images。因此,首先我們需要完成的任務是:採集並儲存攝像頭影象。
使用下圖作為標定板(參考資料),可直接在電腦螢幕上顯示,對其拍照即可。
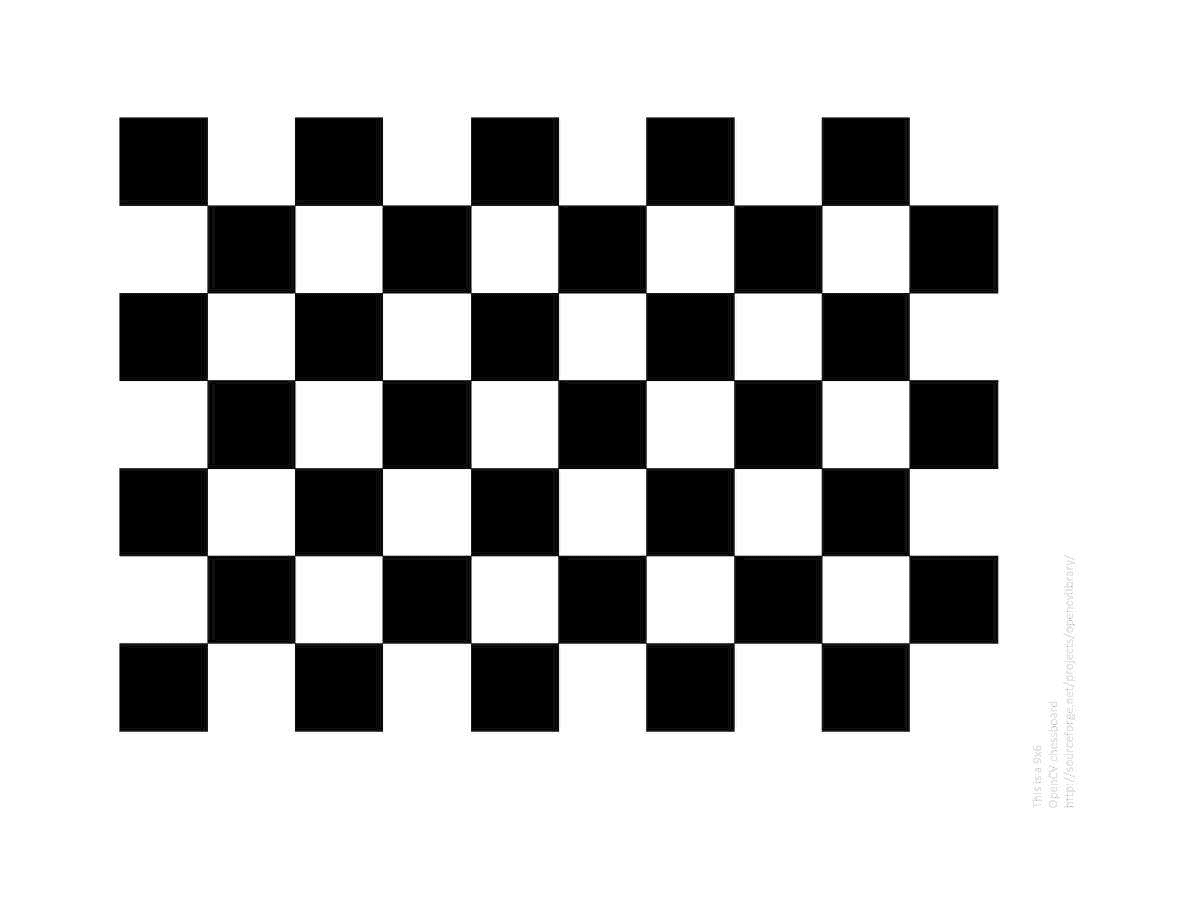
注意:
- 實驗發現,使用長寬格數不一樣的棋盤標定板效果更好。
- 實驗發現,標定板周圍要是白色的才行,黑色的提取不出角點來(在電腦螢幕上顯示標定板時尤其需要注意)。
- 攝像頭需要從不同方向拍攝棋盤格,可參考 OpenCV 安裝目錄下 samples/data 中的 left0x.jpg 系列標定圖片。
採集並儲存圖片
目前沒有找到直接儲存的方法,所以我們選擇寫一個 ROS node 來接收手機傳來的影象,再通過 OpenCV 進行顯示和儲存。
為了方便,我們選擇直接在 ORB-SLAM2 的 ros_mono.cc 的程式碼基礎上進行修改,在 ros_mono.cc 同一目錄下寫了個 ros_camera_capture.cc:
/**
* This file is to capture images from Android phone, for camera calibration
* This file is used with Android_Camera-IMU
*/
#include<iostream>
#include<algorithm>
#include<fstream>
#include<chrono>
#include<ros/ros.h>
#include <cv_bridge/cv_bridge.h>
#include<opencv2/core/core.hpp>
#include"../../../include/System.h"
using namespace std;
string save_dir = "PATH"; // 修改為自己儲存圖片的路徑
int imgId = 0;
void GrabImage(const sensor_msgs::ImageConstPtr& msg);
int main(int argc, char **argv)
{
std::cout << "To save the current frame, please press 'Q' or 'q' " << std::endl;
std::cout << "The images will be saved to " << save_dir << std::endl;
ros::init(argc, argv, "PClistener");
ros::start();
ros::NodeHandle nodeHandler;
ros::Subscriber sub = nodeHandler.subscribe("/camera/image_raw", 1, GrabImage);
ros::spin();
ros::shutdown();
return 0;
}
void GrabImage(const sensor_msgs::ImageConstPtr& msg)
{
string imgname;
cv_bridge::CvImageConstPtr cv_ptr;
try
{
cv_ptr = cv_bridge::toCvShare(msg);
cv::Mat img = cv_ptr->image;
cv::imshow("img_name", img);
char key = cv::waitKey(1);
// press "q" to save the image
if(key == 'q' || key == 'Q'){
imgId++;
imgname = "img_" + to_string(imgId) + ".jpg";
cv::imwrite(save_dir + imgname, img);
std::cout << "has saved image "<< imgId << " to " << save_dir << std::endl;
}
}
catch (cv_bridge::Exception& e)
{
ROS_ERROR("cv_bridge exception: %s", e.what());
return;
}
}注意修改其中儲存影象的目錄。
另外,在 ORB_SLAM2/Examples/ROS/ORB_SLAM2 目錄中的 CMakeLists.txt 中新增如下內容(新增在 # Node for monocular camera 上方即可):
# Node for capture images for camera calibration
rosbuild_add_executable(CameraCapture
src/ros_camera_capture.cc
)
target_link_libraries(CameraCapture
${LIBS}
)之後重新編譯 ORB_SLAM2 專案。
cd PATH/ORB_SLAM2
./build_ros.sh使用方法:
Terminal 1:
roscore手機進入 app 執行
Terminal 2: 在 Android_Camera-IMU 目錄
roslaunch android_cam-imu.launch(可以關掉 Rviz)
Terminal 3:
rosrun ORB_SLAM2 CameraCapture滑鼠選中影象框,按下 q 鍵儲存影象。
進行標定
使用 OpenCV samples 中的程式碼實現。參考資料
標定例程
新建一個工作目錄(資料夾)camera_calibration_opencv,將 OpenCV 安裝目錄中的 samples/cpp/tutorial_code/calib3d/camera_calibration 資料夾內的內容拷貝至該目錄。
修改 VID5.xml
VID5.xml 中儲存著標定影象的路徑,所以要在 VID.xml 中新增所有標定影象的路徑,eg:
<?xml version="1.0"?>
<opencv_storage>
<images>
PATH/img_1.jpg
PATH/img_2.jpg
PATH/img_3.jpg
</images>
</opencv_storage>修改 in_VID5.xml
<BoardSize_Width> 9</BoardSize_Width>
<BoardSize_Height>6</BoardSize_Height>表示棋盤格的寬和高,注意,這裡的寬度和高度是指內部交叉點的個數,而不是方形格的個數。如上圖棋盤的資料就是9和6。
<Square_Size>20</Square_Size>修改為每格的邊長 (mm),拿尺子量。
<Input>"VID5.xml"</Input>修改 VID5.xml 的路徑。
<Calibrate_FixPrincipalPointAtTheCenter> 1 </Calibrate_FixPrincipalPointAtTheCenter>此處原來是0,需要改為1,表示引入切向畸變引數(因為 ORB-SLAM2 中也引入了切向畸變引數),否則只有徑向畸變引數。
其它地方應該不需要改動,想進一步瞭解可看其中的註釋。
編譯
在工作目錄 camera_calibration_opencv 中新建 CMakeLists.txt:
project(Camera_Calibration)
set(CMAKE_CXX_STANDARD 11)
find_package(OpenCV 3.0 QUIET)
if(NOT OpenCV_FOUND)
find_package(OpenCV 2.4.3 QUIET)
if(NOT OpenCV_FOUND)
message(FATAL_ERROR "OpenCV > 2.4.3 not found.")
endif()
endif()
include_directories(${OpenCV_INCLUDE_DIR})
add_executable(Camera_Calibration camera_calibration.cpp)
target_link_libraries(Camera_Calibration ${OpenCV_LIBS})之後編譯:
cd camera_calibration_opencv
mkdir build
cd build
cmake ..
make執行,標定
cd camera_calibration_opencv
./Camera_Calibration in_VID5.xml程式啟動後會顯示標定影象的角點提取情況,之後會顯示校正後影象,一個一個全部關閉後才會儲存標定引數至 out_camera_data.xml。
引數填入 ORB-SLAM2 的配置檔案
引數輸出在 out_camera_data.xml 中:
<camera_matrix type_id="opencv-matrix">是相機內參矩陣,順序為 fx, 0, cx; 0, fy, cy; 0, 0, 1。<distortion_coefficients type_id="opencv-matrix">是畸變引數,其順序為 k1, k2, p1, p2, k3。
之後在 ORB_SLAM2 中新建一個配置檔案 AndroidPhone.yaml(建哪兒都行,我為了方便就和 TUM1.yaml 放在了一個目錄下),將 TUM1.yaml 的內容拷貝過來,並把其中的 Camera 引數進行修改。
注意: 相機引數對 ORB-SLAM2 的執行效果有極大影響(尤其是初始化),所以標定過程須認真完成。
執行 ORB-SLAM2 Mono
Terminal 1:
roscore手機進入 app 執行
Terminal 2: 在 Android_Camera-IMU 目錄
roslaunch android_cam-imu.launch(可以關掉 rvis)
Terminal 3:
rosrun ORB_SLAM2 Mono PATH_TO_VOCABULARY PATH_TO_SETTINGS_FILE執行效果展示:
注意: ORB-SLAM2 Mono 還是比較難以初始化的(其設定的初始化條件相對苛刻),在開始時,選擇特徵紋理豐富的區域,多上下左右平移相機,有利於初始化。
簡化啟動
上述啟動步驟需要啟動3個終端,挺麻煩的,所以可以選擇寫一個指令碼來自動啟動這3個終端。參考資料
新建 ORB_SLAM2_with_AndroidPhone.sh,在其中填入:
gnome-terminal --title="roscore" -x bash -c "roscore"
# 暫停 2s,保證幾個不同終端的啟動順序
sleep 2s;
gnome-terminal --title="AndroidPhone" -x bash -c "cd PATH/Android_Camera-IMU; roslaunch android_cam-imu.launch"
sleep 2s;
gnome-terminal --title="ORB-SLAM2" -x bash -c "rosrun ORB_SLAM2 Mono PATH_TO_VOCABULARY PATH_TO_SETTINGS_FILE"之後賦予許可權(僅需一次):
chmod +x ORB_SLAM2_with_AndroidPhone.sh執行:
./ORB_SLAM2_with_AndroidPhone.sh即可一次性開啟3個終端,並執行相關命令。之後手機再開啟 app 就可以了。
注意: 此時終端執行結束後會自動退出,如果不想自動退出,可 在terminal點右鍵,選擇Profiles->Profile Preferences然後找到Title and Command,裡面有一項When command exits,後面選擇為Hold the terminal open。參考資料
參考資料
- 在Ubuntu 18.04 LTS安裝ROS Melodic
- sudo rosdep init出錯的解決方案
- sudo rosdep init 錯誤
- ERROR while running ./build_ros.sh #535
- ubuntu16.04下用筆記本攝像頭和ROS編譯執行ORB_SLAM2的單目AR例程
- ROS實時採集Android的影象和IMU資料
- OpenCV 相機引數標定(Camera Calibration
- 採集Android手機攝像頭執行ORB_SLAM2(ubuntu16.04+ROS kinetic
- ubuntu下通過命令開啟多個終端並在相應終端執指令
- gnome-terminal
ORB-SLAM2 系列博文
ORB-SLAM2 系列博