
淺談網路最大流
阿新 • • 發佈:2020-07-09
# 網路最大流
#### 目錄
- 前言
- 雙倍經驗
- 網路流初步
- 網路最大流
- $EK$增廣路演算法
- $Dinic$演算法
------------
#### 前言
這篇題解是當做學習記錄寫的,所以會對網路最大流這個概念進行講解($dalao$們可以忽略蒟蒻$orz$)
#### 雙倍經驗$Time$
1. [洛谷P3376 【模板】](https://www.luogu.com.cn/problem/P3376) ($Ek$演算法 / $Dinic$演算法)
2. [洛谷P2740 [USACO4.2]草地排水Drainage Ditches](https://www.luogu.com.cn/problem/P2740)
------------
#### 網路流初步
這裡主要討論一下網路流演算法可能會涉及到的一些概念性問題
- 定義
對於任意一張**有向圖**(也就是**網路**),其中有$N$個點、$M$條邊以及源點$S$和匯點$T$
然後我們把$c(x,y)$稱為邊的**容量**
- 轉換
為了通俗易懂,我們來結合生活實際理解上面網路的定義:
將有向圖理解為我們城市的**水網**,有$N$戶家庭、$M$條管道以及供水點$S$和匯合點$T$
是不是好理解一點?現在給出一張網路(圖醜勿怪啊QAQ):
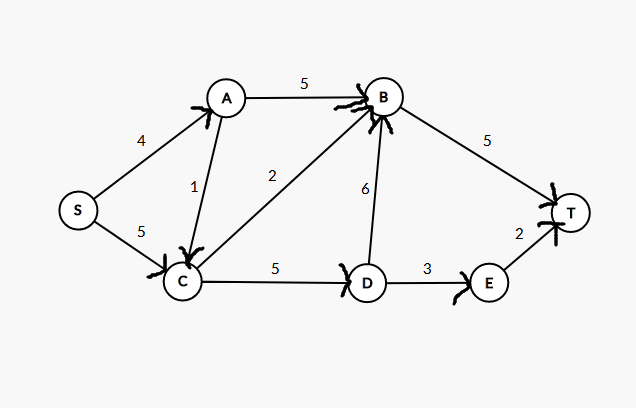
$S->C->D->E->T$就是該網路的一個流,$2$這個流的流量
- 流函式
和上面的$c$差不多,我們把$f(x,y)$稱為邊的**流量**,則$f$稱為網路的流函式,它滿足三個條件:
1. $s(x,y)≤c(x,y)$
2. $f(x,y)=-f(y,x)$
3. $\forall$ $x$≠$S$,$x≠T$, $\sum_{(u,x)∈E }f(u,x)=\sum_{(x,v)∈E }f(x,v)$
這三個條件其實也是流函式的三大性質:
1. 容量限制:每條邊的流量總不可能大於該邊的容量的(不然水管就爆了)
2. 斜對稱:正向邊的流量=反向邊的流量(反向邊後面會具體講)
3. 流量守恆:正向的所有流量和=反向的所有流量和(就是總量始終不變)
- 殘量網路
在任意時刻,網路中所有節點以及剩餘容量大於$0$的邊構成的子圖被稱為**殘量網路**
------------
#### 最大流
對於上面的網路,合法的流函式有很多,其中使得整個網路流量之和最大的流函式稱為網路的**最大流**,此時的流量和被稱為網路的**最大流量**
最大流能解決許多實際問題,比如:一條完整運輸道路(含多條管道)的一次最大運輸流量,還有**二分圖**(蒟蒻還沒學二分圖,學了之後會更新的qwq)
下面就來介紹計算最大流的兩種演算法:$EK$增廣路演算法和$Dinic$演算法
------------
#### $Edmonds-Karp$增廣路演算法
(為了簡便,習慣稱為$EK$演算法)
- 首先來講增廣路是什麼:
若一條從$S$到$T$的路徑上所有邊的剩餘容量都大於0,則稱這樣的路徑為一條**增廣路**(剩餘流量:$c(x,y)-f(x,y)$)
- 然後就是$EK$演算法的核心思想啦:
如上,顯然我們可以讓一股流沿著增廣路從$S$流到$T$,然後使網路的流量增大
$EK$演算法的思想就是**不斷用**BFS**尋找增廣路並不斷更新最大流量值,直到網路上不存在增廣路為止**
- 再來講理論實現過程:
在$BFS$尋找一條增廣路時,我們只需要考慮**剩餘流量不為$0$的邊**,然後找到一條從$S$到$T$的路徑,同時計算出路徑上**各邊剩餘容量值的最小值$dis$**,則網路的最大流量就可以增加$dis$(**經過的正向邊容量值全部減去$dis$,反向邊全部加上$dis$**)
- **反向邊**
插入講解一下反向邊這個概念,這是網路流中的一個重點
為什麼要建反向邊?
因為可能**一條邊可以被包含於多條增廣路徑**,所以為了尋找所有的增廣路經我們就要讓這一條邊有**多次被選擇的機會**
而構建反向邊則是這樣一個機會,相當於給程式一個**反悔**的機會!
為什麼是反悔?
因為我們在找到一個$dis$後,就會對每條邊的容量進行減法操作,而**直接更改值就會影響到之後尋找另外的增廣路**!
還不好理解?那我們舉個~~通俗易懂的~~例子吧:
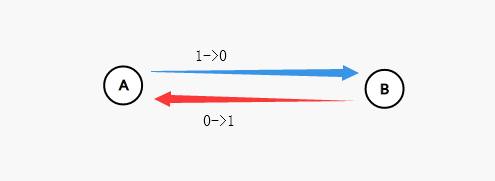
原本$A$到$B$的正邊權是1、反邊權是0,在第一次經過該邊後(假設$dis$值為1),則正邊權變為0,反邊權變為1
當我們需要第二次經過該邊時,我們就能夠通過走反向邊恢復這條邊的原樣(可能有點繞,大家好好理解一下)
以上都是我個人的理解,現在給出《演算法競賽進階指南》上關於反向邊的證明:
“**當一條邊的流量$f(x,y)>0$時,根據斜對稱性質,它的反向邊流量$f(y,x)<0$,此時必定有$f(y,x) q;
q.push(s);
vis[s]=1;
dis[s]=2005020600;
while(!q.empty()) {
int x=q.front();
q.pop();
for(register int i=head[x];i;i=e[i].net) {
if(e[i].val==0) continue; //我們只關心剩餘流量>0的邊
int v=e[i].to;
if(vis[v]==1) continue; //這一條增廣路沒有訪問過
dis[v]=min(dis[x],e[i].val);
pre[v]=i; //記錄前驅,方便修改邊權
q.push(v);
vis[v]=1;
if(v==t) return 1; //找到了一條增廣路
}
}
return 0;
}
inline void update() { //更新所經過邊的正向邊權以及反向邊權
int x=t;
while(x!=s) {
int v=pre[x];
e[v].val-=dis[t];
e[v^1].val+=dis[t];
x=e[v^1].to;
}
ans+=dis[t]; //累加每一條增廣路經的最小流量值
}
int main() {
scanf("%d%d%d%d",&n,&m,&s,&t);
for(register int i=1;i<=m;i++) {
scanf("%d%d%lld",&u,&v,&w);
if(flag[u][v]==0) { //處理重邊的操作(加上這個模板題就可以用Ek演算法過了)
add(u,v,w);
flag[u][v]=tot;
}
else {
e[flag[u][v]-1].val+=w;
}
}
while(bfs()!=0) { //直到網路中不存在增廣路
update();
}
printf("%lld",ans);
return 0;
}
```
------------
#### $Dinic$演算法
$EK$演算法每次都可能會遍歷整個殘量網路,但只找出一條增廣路
是不是有點不划算?能不能一次找多條增廣路呢?
答案是可以的:$Dinic$演算法
- 分層圖&$DFS$
根據$BFS$寬度優先搜尋,我們知道對於一個節點$x$,我們用$d[x]$來表示它的**層次**,即$S$到$x$最少需要經過的邊數。在殘量網路中,滿足$d[y]=d[x]+1$的邊$(x,y)$構成的子圖被稱為**分層圖**(相信大家已經接觸過了吧),而分層圖很明顯是一張有向無環圖
為什麼要建分層圖?
講這個原因之前, 我們還要知道一點:**$Dinic$演算法還需要$DFS$**
現在再放上第一張圖,我們來理解

根據層次的定義,我們可以得出:
```
第0層:S
第1層:A、C
第2層:B、D
第3層:E、T
```
在$DFS$中,從$S$開始,每次我們向下一層次隨便找一個點,直到到達$T$,然後再一層一層回溯回去,繼續找這一層的另外的點再往下搜尋
這樣就滿足了我們同時求出多條增廣路的需求!
- $Dinic$演算法框架
1. 在殘量網路上$BFS$求出節點的層次,構造分層圖
2. 在分層圖上$DFS$尋找增廣路,在回溯時同時更新邊權
- 適用範圍
時間複雜度:$O(n^2m)$,一般能夠處理$10^4$~$10^5$規模的網路
相較於$EK$演算法,顯然$Dinic$演算法的效率更優也更快:雖然在稀疏圖中區別不明顯,但在稠密圖中$Dinic$的優勢便凸顯出來了(所以$Dinic$演算法用的更多)
此外,$Dinic$演算法求解二分圖最大匹配的時間複雜度為$O(m\sqrt{n})$
- 程式碼$Code$
這份程式碼是本模板題的AC程式碼,但是使用到了$Dinic$演算法的兩個優化:**當前弧優化+剪枝**
```cpp
#include q;
q.push(s);
dis[s]=0;
now[s]=head[s];
while(!q.empty()) {
int x=q.front();
q.pop();
for(register int i=head[x];i;i=e[i].net) {
int v=e[i].to;
if(e[i].val>0&&dis[v]==inf) {
q.push(v);
now[v]=head[v];
dis[v]=dis[x]+1;
if(v==t) return 1;
}
}
}
return 0;
}
inline int dfs(int x,long long sum) { //sum是整條增廣路對最大流的貢獻
if(x==t) return sum;
long long k,res=0; //k是當前最小的剩餘容量
for(register int i=now[x];i&∑i=e[i].net) {
now[x]=i; //當前弧優化
int v=e[i].to;
if(e[i].val>0&&(dis[v]==dis[x]+1)) {
k=dfs(v,min(sum,e[i].val));
if(k==0) dis[v]=inf; //剪枝,去掉增廣完畢的點
e[i].val-=k;
e[i^1].val+=k;
res+=k; //res表示經過該點的所有流量和(相當於流出的總量)
sum-=k; //sum表示經過該點的剩餘流量
}
}
return res;
}
int main() {
scanf("%d%d%d%d",&n,&m,&s,&t);
for(register int i=1;i<=m;i++) {
scanf("%d%d%lld",&u,&v,&w);
add(u,v,w);
}
while(bfs()) {
ans+=dfs(s,inf); //流量守恆(流入=流出)
}
printf("%lld",ans);
return 0;
}
```
- **當前弧優化**
對於一個節點$x$,當它在$DFS$中走到了第$i$條弧時,前$i-1$條弧到匯點的流一定已經被流滿而沒有可行的路線了
那麼當下一次再訪問$x$節點時,前$i-1$條弧就沒有任何意義了
所以我們可以在每次列舉節點$x$所連的弧時,改變列舉的起點,這樣就可以刪除起點以前的所有弧,來達到優化剪枝的效果
對應到程式碼中,就是$now$陣列
------------
#### 後序
終於寫完了....現在來特別感謝一些:@那一條變阻器 對於使用$EK$演算法過掉本題的幫助 以及 @取什麼名字 講解$Dinic$演算法的$DFS$部分內容
如果本篇題解有任何錯誤或您有任何不懂的地方,歡迎留言區評論,我會及時回覆、更正,謝謝大家orz!
-----