
imu標定 imu_tk
1. 首先標定加速度計,這是imu加速度計xyz三個軸在標定過程中的讀數:
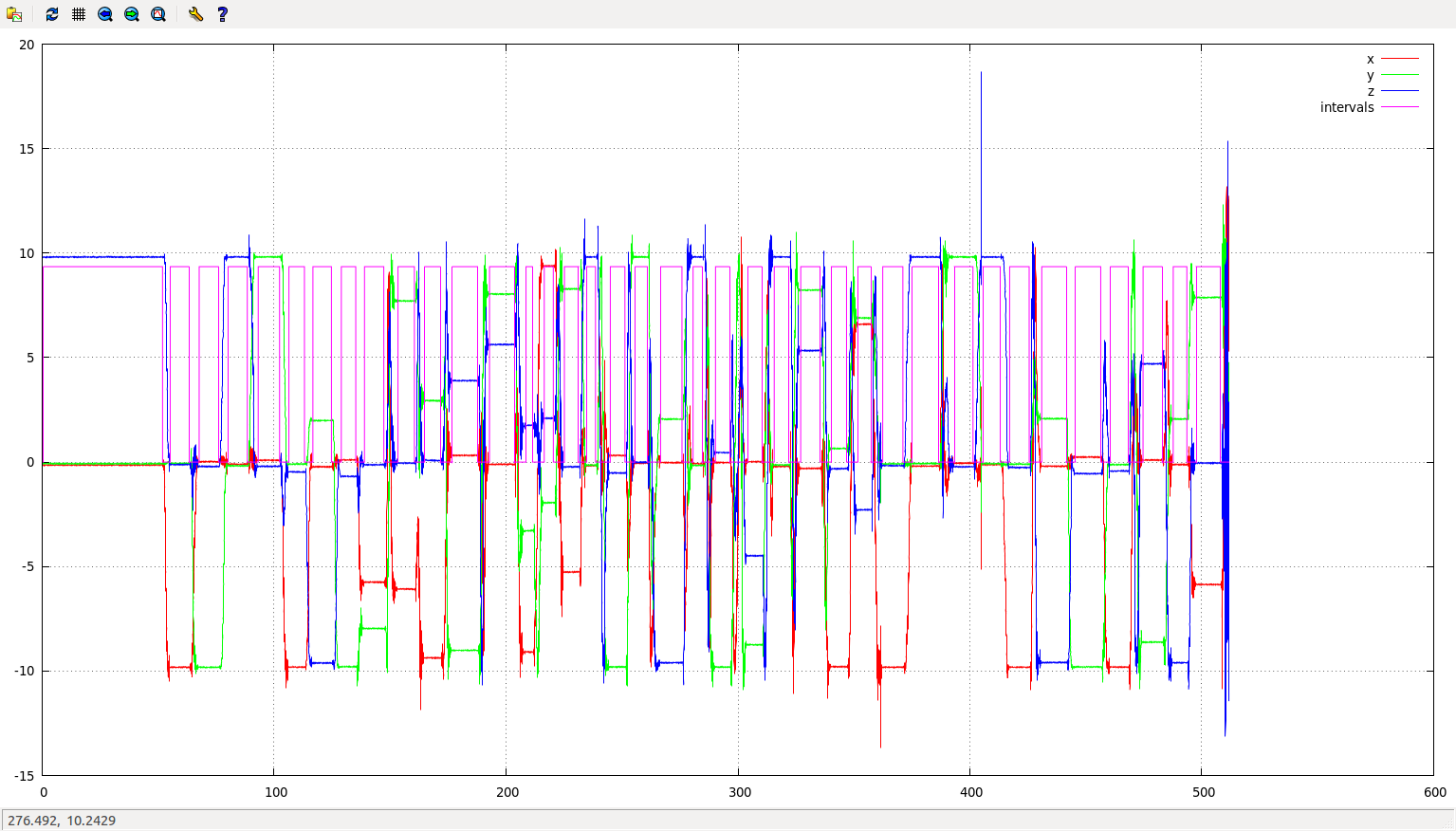
標定結果:

2. 利用加速度計的標定結果,標定陀螺儀,結果:

imu標定 imu_tk
相關推薦
imu標定 imu_tk
加速度 imu nbsp 標定 src 陀螺儀 讀數 加速度計 cnblogs 1. 首先標定加速度計,這是imu加速度計xyz三個軸在標定過程中的讀數: 標定結果: 2. 利用加速度計的標定結果,標定陀螺儀,結果: imu標定 imu_tk
利用kalibr工具進行camera-IMU標定
camera-IMU標定一camera-IMU標定簡述1標定目的:我們進行camera-IMU的目的是為了得到IMU和相機座標系的相對位姿矩陣T。2標定工具:3輸入檔案:以下內容預設為標定雙目相機。和靜態標定不同,本標定的輸入檔案包括1 用帶imu的相機拍攝的視訊2 視訊中i
基於matlab的雙目+IMU標定
上一次主要講了關於雙目標定過程中一些需要注意的問題,在視覺slam中,很重要的一個方向是視覺與IMU的融合,因此也就有了很多相機與IMU融合的硬體。這次就來講講VIO硬體的標定,和雙目類似的,在這個標定中我們最終需要得到IMU相對於相機的rotation和t
kalibr的相機和imu時延標定測試
kalibr提供了多個相機和IMU之間的空間和時間標定演算法,時間上可以標定出相機和IMU時間戳的延時,如果是rolling shutter的相機,還可以標定出相機每一行掃描和imu的時延。不過這篇文章研究的是global shutter,所以是相機和imu整體的時延。 kalibr計算相機IM
Kalibr 標定雙目內外引數以及 IMU 外引數
本文記錄使用 Kalibr 標定雙目相機內外引數以及和IMU之間外引數的標定過程. 採用的硬體裝置為小覓的雙目VIO裝置( MyntEYE), 並且預設你已經有了ROS的知識基礎. 標定 stereo-imu 之前, 需要知道雙目的內外引數, 所以先進行雙目內外
安裝kalibr標定IMU Ubuntu16.04
參考 building from source前提是安裝了ROS kinetic和catkin工作空間。 1.從原始碼安裝工具箱 安裝ROS indigo (see ros.org for more information) 在Ubuntu 16.04安裝RO
IMU與camera標定、Kalibr
https://github.com/ethz-asl/kalibr1.安裝Kalibr 提供兩種使用方式。第一種為CDE下直接使用,作者將所需的庫檔案打包好,省去了配置dependency的步驟,可以直接從https://github.com/ethz-asl/kalibr/wiki/downloads下載
學習Kalibr工具--Camera與IMU聯合標定過程
上一節介紹了,用kalibr工具對camera進行標定的操作流程,在camera標定之好之後,進行camera與IMU進行聯合標定的操作的學習,即求取相機和IMU 之間的轉換關係(座標系之間的相對位姿矩陣);需要先知道相機的內外引數(單目的內外引數和雙目的內外引數),用kalib
IMU-Camera 聯合標定資料總結
最近在研究imu和相機的聯合標定方法,根據網上查到的資料和github上的開源工具總結如下。1、聯合標定的工具Kalibrhttps://github.com/ethz-asl/kalibrwiki寫的很全了,總結以下要點:需要:1、內參:尺度,軸偏差、非線性(應用到raw
imu和canmera標定
cnblogs 結果 csdn 操作 net 過程 標定 代碼 -- 最近在研究imu和相機的聯合標定方法,根據網上查到的資料和github上的開源工具總結如下。 1、聯合標定的工具Kalibrhttps://github.com/ethz-asl/kalibr wik
opencv標定程序(改動)
dsm camera boa center create auth src targe 照片 轉載請註明來自:http://blog.csdn.net/zhouyelihua/article/details/38421377 資源下載見:點擊打開鏈接 百度雲盤免
雙目相機標定以及立體測距原理及OpenCV實現
ada eps 左右 flag 並且 length turn iostream 中一 作者:dcrmg 單目相機標定的目標是獲取相機的內參和外參,內參(1/dx,1/dy,Cx,Cy,f)表征了相機的內部結構參數,外參是相機的旋轉矩陣R和平移向量t。內參中dx和d
標定Kinect v2彩色攝像頭:使用iai_kinect2,采用qhd(960*540)大小的彩色圖像
路徑 相同 release www 分享 程序 image string 步驟 開篇一作,這篇博文是純應用的,沒有任何理論說明,就當是一個實踐提醒啦。 安裝kinect v2相機驅動和標定程序得益於下面二位前輩的引薦工作: http://www.cnblogs.com/ga
matlab stereo_gui立體標定
命名 校正 tlab com rect 運行 matlab 技術 攝像頭 http://www.vision.caltech.edu/bouguetj/calib_doc/index.html#examples 文檔中舉了幾個例子,有關雙目的是第5個, 這個例子展示了如何使
Halcon學習筆記——機器視覺應用工程開發思路及相機標定
助手 創建模板 建模 visio open 這一 目的 傅裏葉變換 綁定 機器視覺應用工程開發思路 機器視覺應用工程主要可劃分為兩大部分,硬件部分和軟件部分。 1.硬件部分,硬件的選型至關重要,決定了後續工作是否可以正常開展,其中關鍵硬件部
項目總結(3.DIBR技術項目總結(1.TOF相機及標定相關))
wan html dib ges img 項目總結 csdn sdn bsp 1.定義: http://blog.csdn.net/lavendarwang/article/details/20729595 項目總結(3.DIBR技術項目總結(1.TOF相機及標定相關)
Matlab2015 雙目相機自動標定
匹配 鏡頭 過程 旋轉 單位 com 選擇 spa 使用 一、 標定步驟 1. 調出標定工具箱 在命令行輸入stereoCameraCalibrator,出現如下界面: 2. 勾選相應的選項 然後將上面的“Skew
相機標定過程
機器視覺1. 攝像機標定的數學過程如下: 這裏程序的實現是在opencv中,所以就用opencv的程序來說明具體的過程.註意各個版本的opencv之間的程序移植性並不好,以下程序是在opencv2.4.3下編制運行的,註意1.程序運行前需要插上攝像頭,否則程序有可能不能正常運行2.獲取棋盤格圖像張正友論文中建
IMU、INS、DGPS和POS
卡爾曼濾波器 mar 不同 clas 傳播 突出 相關 ron 平滑 慣性導航 通過測量飛行器的加速度,並自動進行積分運算獲得飛行器瞬時速度和瞬時位置數據的技術。組成慣性導航系統的設備都安裝在運載體內,工作時不依賴外界信息也不向外界輻射能量不易受到幹擾,是一種自主式導航系統
ROS中使用IMU傳感器發布消息
ret creat mean tac work pan stop 實現 ini 下面使用SYD Dynamics的9軸AHRS(Attitude and heading reference system),來發布sensor_msgs/Imu類型的消息。 將傳感