
Object Detection中的IOU
重疊度(IOU,intersection over union,邊框的交集):
目標檢測是定位出待檢測目標的邊界框bounding box,就像圖片中一樣,不僅需要定位出車輛的邊界框bounding box, 還要識別出邊界框bounding box 裡面的物體就是車輛。

對於邊界框bounding box的定位精度,有一個很重要的概念: 因為我們演算法不可能百分百跟人工標註的資料完全匹配,因此就存在一個定位精度評價公式:IOU,
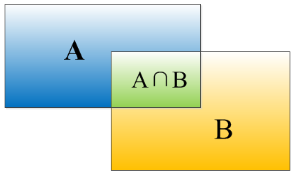
IOU 它定義了兩個邊界框bounding box的重疊度,即矩形框A、B的重疊面積佔A、B並集的面積比例。
(矩形框A可以看作人工標註的bounding box,矩形框B可以看作目標檢測演算法預測的bounding box)
相關推薦
Object Detection中的IOU
重疊度(IOU,intersection over union,邊框的交集): 目標檢測是定位出待檢測目標的邊界框bounding box,就像圖片中一樣,不僅需要定位出車輛的邊界框bounding box, 還要識別出邊界框bounding box 裡面的物體就是車輛。 對於邊界
目標識別(object detection)中的 IoU(Intersection over Union)
首先直觀上來看 IoU 的計算公式: 由上述圖示可知,IoU 的計算綜合考慮了交集和並集,如何使得 IoU 最大,需要滿足,更大的重疊區域,更小的不重疊的區域。 兩個矩形窗格分別表示: 左上點、右下點的座標聯合標識了一塊
tensorflow object detection faster r-cnn 中keep_aspect_ratio_resizer是什麽意思
ng- 最小 圖片 sta fault overflow cti hub .com 如果小夥伴的英語能力強可以直接閱讀這裏:https://stackoverflow.com/questions/45137835/what-the-impact-of-differe
[Object Detection]關於“在預訓練網路中增加捲積和全連線層可以改善效能”
Yolo論文裡提到"Ren et al. show that adding both convolutional and connected layers to pretrained networks can improve performance [28]." [28] S. Ren, K. He, R.
用 eval.py 跟蹤 object detection 過程中的 mAP 變化
衡量物體檢測的精度,指標之一是mAP(mean Average Pricision)。在tensorflow中有object detection的api,雖然操作起來很酸爽,表現了還在開發階段的api該有的不穩定性和繁雜性(等噴),但確實為物體檢測的進行提供了便
Object Detection.... (更新中....)
Cascade R-CNN: Delving into High Quality Object Detection:參考連結:知乎傳送門 paper亮點:設定不同的 IoU 閾值,bbox reg 的級聯。positive(pos) negative(neg)就是在得到proposals後,
利用Google Object Detection模組識別圖片中的物體
筆者環境win1064位 1.anaconda python 3.5 64為安裝包 2.安裝tensflow1.0 第一部分(圖片物體識別) 1.下載tensflow的原始碼包,並解壓 2.下載 Protoc protoc-3.4.0-win32.
ImageAI (三) 使用Python快速簡單實現視訊中物體檢測 Video Object Detection and Tracking
前兩篇已經講解了ImageAI實現圖片預測以及圖片物體檢測的方法,現在再來講解一下ImageAI的第三個功能視訊中的物體檢測。 準備工作以及ImageAI的安裝可以詳見上一篇 Image Prediction: ImageAI (一) Object Dete
TensorFlow Object Detection API中的Faster R-CNN /SSD模型引數調整
關於TensorFlow Object Detection API配置,可以參考之前的文章https://becominghuman.ai/tensorflow-object-detection-api-tutorial-training-and-evaluating-custom-object-detec
【轉】論文閱讀(Chenyi Chen——【ACCV2016】R-CNN for Small Object Detection)
數據 大小 table 使用 con 改進 包括 end 修改 Chenyi Chen——【ACCV2016】R-CNN for Small Object Detection 目錄 作者和相關鏈接 方法概括 創新點和貢獻 方法細節 實驗結果 總結與收獲點 參考文獻
YOLO(You Only Look Once):Real-Time Object Detection
path nor bat pen 2-0 object network file with caffe-yolo:https://github.com/xingwangsfu/caffe-yolo YOLO in caffe Update 12-05-2016: Curre
object detection物體檢測基本概念
sta first 物體檢測 base npr poi cores out objects 1.precision-recall https://cn.mathworks.com/help/vision/ref/evaluatedetectionprecision.h
Focal Loss for Dense Object Detection 論文閱讀
因此 分類 技術分享 模型 出發點 oss oca 圖片 同時 何凱明大佬 ICCV 2017 best student paper 作者提出focal loss的出發點也是希望one-stage detector可以達到two-stage detector的準確率,同時
Object類中的方法
保持 rup clas throw second 我們 space hexstring sco 方法一 Object() 即Object的構造方法 Java中規定,每個類都有一個默認的無參構造器,此方法也就是用來體現這一特性方法二 registerNatives
TensorFlow使用object detection訓練並識別自己的模型
point name mode 添加 asr with pipeline stderr powers 使用object detection訓練並識別自己的模型 1.安裝tensorflow(version>=1.4.0) 2.部署tensorflow models
課程四(Convolutional Neural Networks),第三 周(Object detection) —— 0.Learning Goals
member 數據 定位 finding dataset pre intersect sta nal Learning Goals: Understand the challenges of Object Localization, Object Detection a
課程四(Convolutional Neural Networks),第三 周(Object detection) —— 1.Practice questions:Detection algorithms
car mage 分享圖片 nbsp blog obj 分享 圖片 pos 【解釋】 tree的兩個bounding boxes 都要保留,因為交並比小於0.5;car 0.73保留;pedestrain 0.98保留;motor
讀論文系列:Object Detection SPP-net
多層 彌補 match rop lte 圖片 detection orien img 本文為您解讀SPP-net: Spatial Pyramid Pooling in Deep Convolutional Networks for Visual Recognition
配置tensorflow object detection api
could ror blog test creat not pre setup.py python 3:安裝tensorflow model 以及slim 版本號為1.4以上的,model和slim均在research 文件夾下 打開research文件目錄 python
谷歌開源的TensorFlow Object Detection API視頻物體識別系統實現教程
cti blog tail xiaoxiao pan clas post ont 谷歌 教程:http://blog.csdn.net/xiaoxiao123jun/article/details/76605928 全部代碼:https://github.com/lyj83