
目標識別(object detection)中的 IoU(Intersection over Union)
首先直觀上來看 IoU 的計算公式:
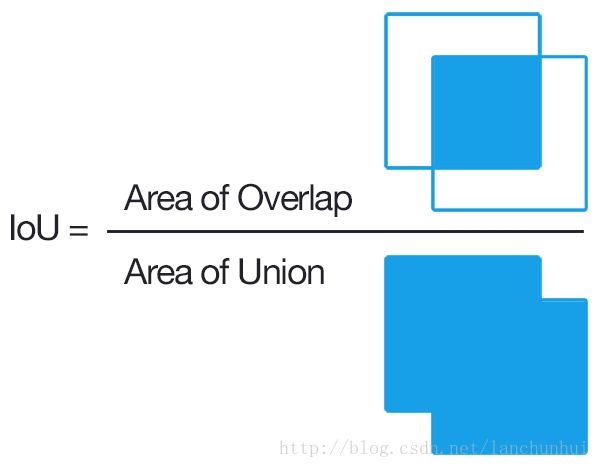
由上述圖示可知,IoU 的計算綜合考慮了交集和並集,如何使得 IoU 最大,需要滿足,更大的重疊區域,更小的不重疊的區域。
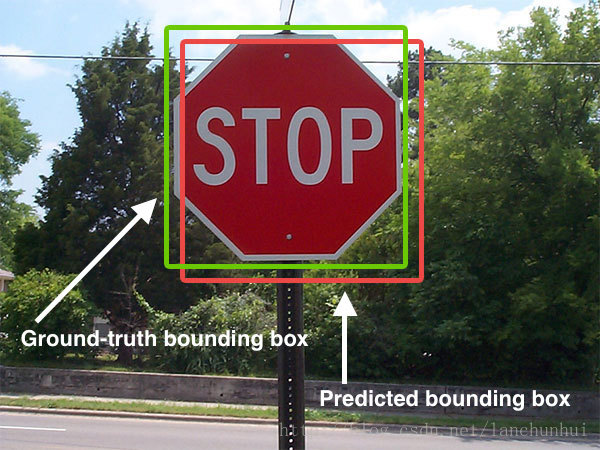
兩個矩形窗格分別表示:
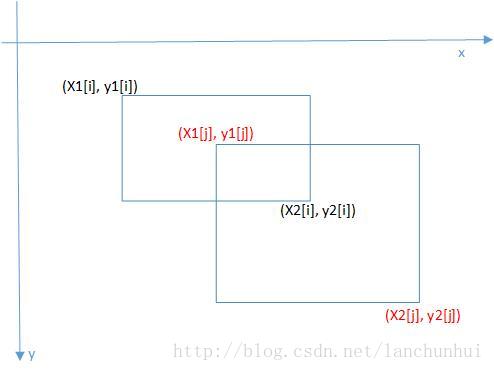
左上點、右下點的座標聯合標識了一塊矩形區域(bounding box),因此計算兩塊 Overlapping 的 bounding boxes 的 IoU 如下:
# ((x1[i], y1[i]), (x2[i], y2[i]))
areai = (x2[i]-x1[i]+1)*(y2[i]-y1[i]+1)
areaj = (x2[j]-x1[j]+1)*(y2[j]-y1[j]+1)
xx1 相關推薦
目標識別(object detection)中的 IoU(Intersection over Union)
首先直觀上來看 IoU 的計算公式: 由上述圖示可知,IoU 的計算綜合考慮了交集和並集,如何使得 IoU 最大,需要滿足,更大的重疊區域,更小的不重疊的區域。 兩個矩形窗格分別表示: 左上點、右下點的座標聯合標識了一塊
目標檢測中IOU的介紹(Intersection over Union)
IOU的輸入 1 ground-truth的bounding box 2 預測的bounding box IOU的輸出 輸出為值在[0,1]之間的數字 IOU = 兩個矩形交集的面積/兩個矩形的並集面積 Reference: https://www.
IoU(Intersection-over-Union)
交併比 (intersection over union) 即為兩個區域的交集與並集的比值。 例如有兩個區域 C 與 G,如下圖表示: 那麼 IoU 的值定義為: IoU=C∩GC∪GIoU=\fra
IoU:Intersection over Union
#傳入的是真值標籤和預測標籤 def bbox_iou(bbox_a, bbox_b): print bbox_a.shape print bbox_b.shape if bbox_a.shape[1] != 4 or bbox_b.shape
DeepLearning.ai作業:(4-3)-- 目標檢測(Object detection)
title: ‘DeepLearning.ai作業:(4-3)-- 目標檢測(Object detection)’ id: dl-ai-4-3h tags: dl.ai homework categories: AI Deep Learning date:
DeepLearning.ai筆記:(4-3)-- 目標檢測(Object detection)
title: ‘DeepLearning.ai筆記:(4-3)-- 目標檢測(Object detection)’ id: dl-ai-4-3 tags: dl.ai categories: AI Deep Learning date: 2018-10-11 1
【 專欄 】- 目標檢測實踐(object detection)
目標檢測實踐(object detection) 本專欄致力於實踐並總結目標檢測各種經典的模型,如:R-CNN,SPP-Net,Fast-RCNN,Faster-RCNN,YOLO,Mask-RCNN等。
目標檢測(Object Detection)原理與實現(一)
基於閾值影象處理的目標檢測 從今天起開始要寫一些關於目標檢測的文章,涵蓋從簡單的閾值影象處理檢測、霍夫變換(hough transform)檢測、模版匹配檢測(剛體匹配)、AAM+ASM+ACM(非剛體)匹配檢測到近代機器學習方法檢測,儘量貼一些程式碼,
CVPR2018 目標檢測(object detection)演算法總覽
CVPR2018上關於目標檢測(object detection)的論文比去年要多很多,而且大部分都有亮點。從其中挑了幾篇非常有意思的文章,特來分享,每篇文章都有詳細的部落格筆記,可以點選連結閱讀。 Cascaded RCNN這篇文章的出發點非常有意思,是
目標檢測(Object Detection)原理與實現(六)
基於形變部件模型(Deformable Part Models)的目標檢測 上節說了基於cascade的目標檢測,cascade的級聯思想可以快速拋棄沒有目標的平滑窗(sliding window),因而大大提高了檢測效率,但也不是沒缺點,缺點就是它僅僅
ECCV2018目標檢測(object detection)演算法總覽
這篇部落格記錄我個人比較感興趣的ECCV2018關於目標檢測(object detection)的一些文章。 1、IOU-Net 論文:Acquisition of Localization Confidence for Accurate Object Dete
目標檢測(Object Detection)原理與實現(五)
基於Cascade分類器的目標檢測 從今天開始進入基於機器學習的目標檢測,前幾節雖然也接觸了一些機器學習的方法,但它主要是做輔助工作,機器學習的方法和非機器學習的方法結合在一起使用,說到這想起來前幾天看到一位博士師兄發的笑話,說的是百度實驗室:
目標檢測(Object Detection)原理與實現
基於形變部件模型(Deformable Part Models)的目標檢測 上節說了基於cascade的目標檢測,cascade的級聯思想可以快速拋棄沒有目標的平滑窗(sliding window),因而大大提高了檢測效率,但也不是沒缺點,缺點就是它僅僅是
影象目標檢測(Object Detection)原理與實現(三)
基於霍夫森林的目標檢測 上節說了霍夫變換(HT)和廣義霍夫變換(GHT),今天就接著廣義霍夫變換說下去,在廣義霍夫變換中,每個投票元素(比如邊緣畫素中的點)在霍夫空間中累加投票的權重是相等的,每個元素投票的權重互不影響,這其實是假設了影象空間中的每個畫
CVPR2018 目標檢測(object detection)演算法總覽(關於2018年最新的目標檢測文章分析)
CVPR2018上關於目標檢測(object detection)的論文比去年要多很多,而且大部分都有亮點。從其中挑了幾篇非常有意思的文章,特來分享,每篇文章都有詳細的部落格筆記,可以點選連結閱讀。Cascaded RCNN這篇文章的出發點非常有意思,是通過分析輸入propo
影象目標檢測(Object Detection)原理與實現(一)
基於閾值影象處理的目標檢測 從今天起開始要寫一些關於目標檢測的文章,涵蓋從簡單的閾值影象處理檢測、霍夫變換(hough transform)檢測、模版匹配檢測(剛體匹配)、AAM+ASM+ACM(非剛體)匹配檢測到近代機器學習方法檢測,儘量貼一些程式
課程四(Convolutional Neural Networks),第三 周(Object detection) —— 0.Learning Goals
member 數據 定位 finding dataset pre intersect sta nal Learning Goals: Understand the challenges of Object Localization, Object Detection a
課程四(Convolutional Neural Networks),第三 周(Object detection) —— 1.Practice questions:Detection algorithms
car mage 分享圖片 nbsp blog obj 分享 圖片 pos 【解釋】 tree的兩個bounding boxes 都要保留,因為交並比小於0.5;car 0.73保留;pedestrain 0.98保留;motor
Rich feature hierarchies for accurate object detection and semantic segmentation(理解)
0 - 背景 該論文是2014年CVPR的經典論文,其提出的模型稱為R-CNN(Regions with Convolutional Neural Network Features),曾經是物體檢測領域的state-of-art模型。 1 - 相關知識補充 1.1 - Selective Searc
【Network Architecture】Feature Pyramid Networks for Object Detection(FPN)論文解析(轉)
目錄 0. 前言 1. 部落格一 2.。 部落格二 0. 前言 這篇論文提出了一種新的特徵融合方式來解決多尺度問題, 感覺挺有創新性的, 如果需要與其他網路進行拼接,還是需要再回到原文看一下細節。這裡轉了兩篇比較好的部落格作為備忘。 1. 部落格一 這篇論文是CVPR20