
PID整定方法
![]()
知乎使用者
17 人贊同了該回答
個人總結的,希望有所幫助,都是平時搜尋到的,然後整理的乾貨
1.在不發生震盪時,增大比例係數,減小積分時間(增大積分系數)。
超調過大,則增大積分時間(減小積分系數)。若想加快響應速度則可減小積分時間(增大積分系數)。
2.確定PI係數
確定比例係數Kp,令積分時間為0,輸入設定為系統最大值的60%-70%,比例係數逐漸增大,直至出現震盪,而後減小比例係數,直至震盪消失,記錄此時的值,則設定值為該值的60%-70%。
確定積分系數Ki,設定一個較大的積分時間(即較小的積分系數),而後逐漸減小直至系統出現震盪,而後再繼續逐漸增大積分時間(減小積分系數),直至震盪消失,設定積分時間為當前值的150%-180%。
(PS:積分系數和積分時間要注意,網上常見的位置式PID控制,積分量都是採用誤差累計,這個時候是經過簡化的PID,積分已經是積分系數不是積分時間,所以zaizh再整定時要注意積分系數從小往大調)
3.PID整定口訣
引數整定找最佳,從小到大順序查
先是比例後積分,最後再把微分加
曲線振盪很頻繁,比例度盤要放大
曲線漂浮繞大彎,比例度盤往小扳
曲線偏離回覆慢,積分時間要下降
曲線波動週期長,積分時間要加長
曲線震盪頻率快,先把微分降下來
動差大來波動慢,微分時間要加長
理想曲線兩個波,前高後低4比1
一看二調多分析,調節質量不會低。
(以上為網上新傳的口訣)
引數整定找最佳,從大到小順次查
先是比例後積分,最後再把微分加
曲線震盪很頻繁,比例度盤要放大
曲線漂浮繞大彎,比例度盤往小扳
曲線偏離回覆慢,積分時間往下降
曲線波動週期長,積分時間要加長
理想曲線兩個波,調節過程高質量
解釋:
控制系統在設計、正定和執行中,衡量系統質量的依據就是系統的過渡過程。當系統的輸入為階躍變化時,系統的過渡過程表現為:發散震盪,燈幅震盪,衰減震盪,單調過程等形式,多數情況下,人們都希望看到衰減震盪過程,且認為下圖所示的過渡過程最好,並將其作為衡量控制系統質量的依據。
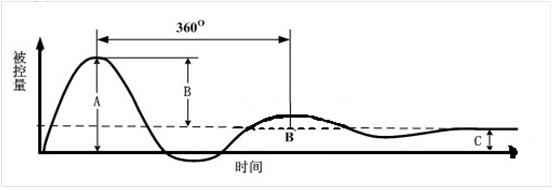
圖 1 最佳衰減震盪
如圖 1,其可作為控制系統質量指標的理由是:其第一次恢復到給定值時較快,而後雖然又偏離了,但是偏離不大,且只有極少數幾次震盪就能穩定下來。量上分析,第一個波峰B的高度為第二個波峰B
*
的4倍,故而這種曲線又稱為4:1衰減曲線,在控制器工程整定時,以能得到4:1的衰減過程為最好,這是的調節器引數可稱為最佳引數。
“引數整定找最佳,從小到大順序查”
在現場偵錯程式工程引數整定中,如果只按4:1衰減比進行整定,那麼可以有很多對的比例度和積分時間同樣滿足4:1的衰減比,但是這些對的數值並不是任意的組合,而是成對的,一定的比例度必須與一定的積分時間組成一對,才能滿足衰減比的條件,改變其中之一,另一個也要隨之改變。因為是成對出現的,所以才有調節器引數的“匹配”問題。而在實際應用中只有附加一個條件,才能從多對數值中選出一對適合的數值。這一對適合的數值通常稱為滿足該新增條件的“最佳整定值”。“從大到小順次查”中的“查”的意思就是找到調節器引數的最佳匹配值。而“從大到小順次查”是說在具體操作時,先把比例度、積分時間防至最大位置,把微分時間調至為零。因為我們需要的是衰減震盪的過渡過程,並避免出現其他的震盪過程,在整定初期,把比例度放至最大位置,目的是減小調節器的放大倍數。而積分放至最大位置,目的是先把積分作用取消。把微分時間調至零也是把微分作用取消。“從大到小……”就是從大到小改變比例度或積分時間刻度,實質是慢慢的增加比例作用或積分作用的放大倍數。也就是慢慢的增加比例或積分作用的影響,避免系統出現大的震盪。最後再根據系統實際情況決定是否使用微分作用。
“先是比例後積分,最後再把微分加”
這句話是經驗的整定步驟,比例作用的最基本的調節作用,口訣說的“先是比例後積分”,目的是簡化調節器的引數整定,即先把積分作用取消和弱化,待系統較穩定後再投運積分作用,尤其是新安裝的控制系統,對系統特性不瞭解時,我們要做的是先把積分作用取消,待調整好比例度,使控制系統大致穩定以後,再加入積分作用。對於比例控制系統,如果規定4:1的衰減過渡過程,則只有一個比例度能夠滿足這一規定,而其他的任何比例度都不可能使過渡過程的衰減比為4:1。因此,對比例控制系統只要找到能滿足4:1衰減比時的比例度就行了。
在調好比例控制的基礎上再加入積分作用,但積分會降低過渡過程的衰減比,則系統的穩定程度也會降低。為了保持系統的穩定程度,可增大調節器的比例度,即減小調節器的放大倍數。在實際工程中往往在整定中投入積分作用後,要把比例度增大約20%。其實質就是個比例度和積分時間數值的匹配問題,在一定範圍內比例度的減小,是可以用增加積分時間的方法來補償的,但是也要看到比例作用和積分作用是互為影響的,如果設定的比例度過大,即便積分時間恰當,系統控制效果仍然會不佳。
“曲線震盪很頻繁,比例度盤要放大”
說的是比例度過小時,會產生週期較短的激烈震盪,且震盪衰減很慢,嚴重時甚至會成為發散震盪,如圖 2所示,這是就要調大比例度,使曲線平緩下來。
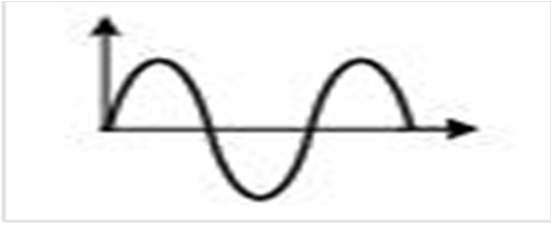
圖 2 曲線震盪頻繁
“曲線篇幅繞大彎,比例度盤往小扳”
比例度過大時會使過渡時間過大,使被調引數變化緩慢,即記錄曲線偏離給定幅值較大,時間較長,這時曲線波動較大且變換無規則,形狀像繞大彎式的變化,如圖所示,此時就要減小比例度,使餘差儘量小。
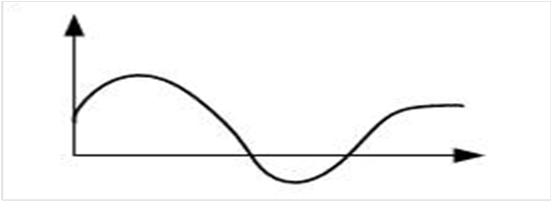
圖 3 比例度過大時的過渡過程曲線
“曲線偏離回覆慢,積分時間往下降。曲線波動週期長,積分時間再加長”
當積分時間太長時,會使曲線非週期地慢慢地回覆到給定值,即“曲線偏離回覆慢”,則應減小積分時間,如圖 4所示。當積分時間太短時,會使曲線震盪週期較長,且衰減很慢,即“曲線波動週期長”,如圖 5所示,則應加長積分時間。
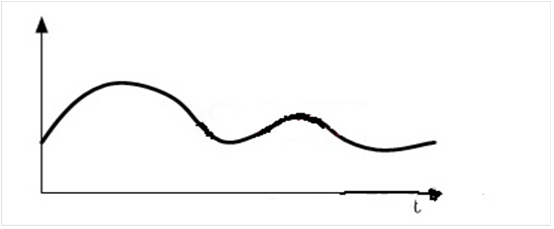
圖 4 積分時間過程的過渡過程曲線
圖 5 積分時間過短
調節器的引數按照比例積分作用整定好後,可在積分時間的0.2-0.5倍範圍內調整微分時間。即“最後再把微分加”由於微分作用會增強系統的穩定性,故採用微分作用後,調節器的比例度可以適當地增大一些,一般以增大0.2為宜。微分作用主要用於滯後和慣性較大的場合,由於微分作用具有超前調解的功能,當系統有較大滯後和較大慣性的情況下,才應啟用微分作用。
注意:
有幾個地方需要注意:
Ø 口訣是儀表實際工作的總結,但由於歷史的原因,當時儀表工所接觸的大多是氣動調節儀表,最早的是04型基地式氣動調節儀表,後來是氣動單元組合儀表,七十年代初期電動儀表在工廠的應用也是很有限的。氣動儀表調比例度就是改變一個針型閥門的開度,為便於觀察閥門的開度,閥門手柄上有個等分刻度盤;電動儀表調的是電位器,同樣也有一個等分刻度盤;這就是口訣中的“比例刻度盤”,但是實際工程中採用比例Kp和積分Ki係數較多,該比例度同Kp成反比,前文所述的積分時間同Ki成反比。
3.摘自《自動控制的故事》
連續控制和PID
無級可調或連續可調的空調機可以精確控制溫度,但開關控制不能再用了。家用空調機中,連續可調的不佔多數,但衝熱水淋浴是一個典型的連續控制問題,因為水龍頭可以連續調節水的流量。沖淋浴時,假定冷水龍頭不變,只調節熱水。那溫度高了,熱水關小一點;溫度低了,熱水開打一點。換句話說,控制作用應該向減少控制偏差的方向變化,也就是所謂負反饋。控制方向對了,還有一個控制量的問題。溫度高了1度,熱水該關小多少呢?
經驗告訴我們,根據具體的龍頭和水壓,溫度高1度,熱水需要關小一定的量,比如說,關小一格。換句話說,控制量和控制偏差成比例關係,這就是經典的比例控制規律:控制量=比例控制增益*控制偏差,偏差越大,控制量越大。控制偏差就是實際測量值和設定值或目標值之差。在比例控制規律下,偏差反向,控制量也反向。也就是說,如果淋浴水溫要求為40度,實際水溫高於40度時,熱水龍頭向關閉的方向變化;實際水溫低於40度時,熱水龍頭向開啟的方向變化。
但是比例控制規律並不能保證水溫能夠精確達到40度。在實際生活中,人們這時對熱水龍頭作微調,只要水溫還不合適,就一點一點地調節,直到水溫合適為止。這種只要控制偏差不消失就漸進微調的控制規律,在控制裡叫積分控制規律,因為控制量和控制偏差在時間上的累積成正比,其比例因子就稱為積分控制增益。工業上常用積分控制增益的倒數,稱其為積分時間常數,其物理意義是偏差恆定時,控制量加倍所需的時間。這裡要注意的是,控制偏差有正有負,全看實際測量值是大於還是小於設定值,所以只要控制系統是穩定的,也就是實際測量值最終會穩定在設定值上,控制偏差的累積不會是無窮大的。這裡再囉嗦一遍,積分控制的基本作用是消除控制偏差的餘差(也叫殘差)。
比例和積分控制規律可以應付很大一類控制問題,但不是沒有改進餘地的。如果水管水溫快速變化,人們會根據水溫的變化調節熱水龍頭:水溫升高,熱水龍頭向關閉方向變化,升溫越快,開啟越多;水溫降低,熱水龍頭向開啟方向變化,降溫越快,關閉越多。這就是所謂的微分控制規律,因為控制量和實際測量值的變化率成正比,其比例因子就稱為比例控制增益,工業上也稱微分時間常數。微分時間常數沒有太特定的物理意義,只是積分叫時間常數,微分也跟著叫了。微分控制的重點不在實際測量值的具體數值,而在其變化方向和變化速度。微分控制在理論上和實用中有很多優越性,但侷限也是明顯的。如果測量訊號不是很“乾淨”,時不時有那麼一點不大不小的“毛刺”或擾動,微分控制就會被這些風吹草動搞得方寸大亂,產生很多不必要甚至錯誤的控制訊號。所以工業上對微分控制的使用是很謹慎的。
比例-積分-微分控制規律是工業上最常用的控制規律。人們一般根據比例-積分-微分的英文縮寫,將其簡稱為PID控制。即使在更為先進的控制規律廣泛應用的今天,各種形式的PID控制仍然在所有控制迴路中佔85%以上。
PID整定
在PID控制中,積分控制的特點是:只要還有餘差(即殘餘的控制偏差)存在,積分控制就按部就班地逐漸增加控制作用,直到餘差消失。所以積分的效果比較緩慢,除特殊情況外,作為基本控制作用,緩不救急。微分控制的特點是:儘管實際測量值還比設定值低,但其快速上揚的衝勢需要及早加以抑制,否則,等到實際值超過設定值再作反應就晚了,這就是微分控制施展身手的地方了。作為基本控制使用,微分控制只看趨勢,不看具體數值所在,所以最理想的情況也就是把實際值穩定下來,但穩定在什麼地方就要看你的運氣了,所以微分控制也不能作為基本控制作用。比例控制沒有這些問題,比例控制的反應快,穩定性好,是最基本的控制作用,是“皮”,積分、微分控制是對比例控制起增強作用的,極少單獨使用,所以是“毛”。在實際使用中比例和積分一般一起使用,比例承擔主要的控制作用,積分幫助消除餘差。微分只有在被控物件反應遲緩,需要在開始有所反應時,及早補償,才予以採用。只用比例和微分的情況很少見。
連續控制的精度是開關控制所不可比擬的,但連續控制的高精度也是有代價的,這就是穩定性問題。控制增益決定了控制作用對偏差的靈敏度。既然增益決定了控制的靈敏度,那麼越靈敏豈不越好?非也。還是用汽車的定速巡航控制做例子。速度低一點,油門加一點,速度低更多,油門加更多,速度高上去當然就反過來。但是如果速度低一點,油門就狂加,導致速度高一點,油門再狂減,這樣速度不但不能穩定在要求的設定值上,還可能失控。這就是不穩定。所以控制增益的設定是有講究的。在生活中也有類似的例子。國民經濟過熱,需要經濟調整,但調整過火,就要造成“硬著陸”,引起衰退;衰退時需要刺激,同樣,刺激過火,會造成過熱。要達成“軟著陸”,經濟調整的措施需要恰到好處。這也是一個經濟動態系統的穩定性問題。
實際中到底多少增益才是最合適的,理論上有很多計算方法,但實用中一般是靠經驗和除錯來摸索最佳增益,業內行話叫引數整定。如果系統響應在控制作用後面拖拖沓沓,大幅度振盪的話,那一般是積分太過;如果系統響應非常神經質,動不動就打擺子,呈現高頻小幅度振盪的話,那一般是微分有點過分。中頻振盪當然就是比例的問題了。不過各個系統的頻率都是不一樣的,到底什麼算高頻,什麼算低頻,這個幾句話說不清楚,應了毛主席那句話:“具體情況具體分析”,所以就打一個哈哈了。
再具體說起來,引數整定有兩個路子。一是首先除錯比例增益以保證基本的穩定性,然後加必要的積分以消除餘差,只有在最必要的情況下,比如反映遲緩的溫度過程或容量極大的液位過程,測量噪聲很低,才加一點微分。這是“學院派”的路子,在大部分情況下很有效。但是工業界有一個“歪路子”:用非常小的比例作用,但大大強化積分作用。這個方法是完全違背控制理論的分析的,但在實際中卻是行之有效,原因在於測量噪聲嚴重,或系統反應過敏時,積分為主的控制規律動作比較緩和,不易激勵出不穩定的因素,尤其是不確定性比較高的高頻部分,這也是鄧小平“穩定壓倒一切”的初衷吧。
在很多情況下,在初始PID引數整定之後,只要系統沒有出現不穩定或效能顯著退化,一般不會去重新整定。但是要是系統不穩定了怎麼辦呢?由於大部分實際系統都是開環穩定的,也就是說,只要控制作用恆定不變,系統響應最終應該穩定在一個數值,儘管可能不是設定值,所以對付不穩定的第一個動作都是把比例增益減小,根據實際情況,減小1/3、1/2甚至更多,同時加大積分時間常數,常常成倍地加,再就是減小甚至取消微分控制作用。如果有前饋控制,適當減小前饋增益也是有用的。在實際中,系統性能不會莫名其妙地突然變壞,上述“救火”式重新整定常常是臨時性的,等生產過程中的機械或原料問題消除後,引數還是要設回原來的數值,否則系統性能會太過“懶散”。
對於新工廠,系統還沒有投運,沒法根據實際響應來整定,一般先估計一個初始引數,在系統投運的過程中,對控制迴路逐個整定。我自己的經驗是,對於一般的流量回路,比例定在0.5左右,積分大約1分鐘,微分為0,這個組合一般不致於一上來就出大問題。溫度迴路可以從2、5、0.05開始,液位迴路從5、10、0開始,氣相壓力迴路從10、20、0開始。既然這些都是憑經驗的估計,那當然要具體情況具體分析,不可能“放之四海而皆準”。
微分一般用於反應遲緩的系統,但是事情總有一些例外。我就遇到過一個小小的冷凝液罐,直徑才兩英尺,長不過5英尺,但是流量倒要8-12噸/小時,一有風吹草動,液位變化非常迅速,不管比例、積分怎麼調,液位很難穩定下來,常常是控制閥剛開始反應,液位已經到頂或到底了。最後加了0.05的微分,液位一開始變化,控制閥就開始抑制,反而穩定下來了。這和常規的引數整定的路子背道而馳,但在這個情況下,反而是“唯一”的選擇,因為測量值和控制閥的飽和變成穩定性主要的問題了。