
【CV】實驗二:特徵檢測與匹配
阿新 • • 發佈:2018-11-06
概述
特徵檢測與匹配的目標是識別一個影象中的關鍵點與另一個影象中的對應點之間的配對。在此實驗中,你將編寫程式碼以檢測影象中的特徵點(對於平移、旋轉和照明具有一定的不變性),並在另一個影象中找到最佳匹配特徵。
實施細節
特徵檢測
參考資料
sobell運算元水平和垂直方向導數問題——chaibubble
3×3sobel運算元

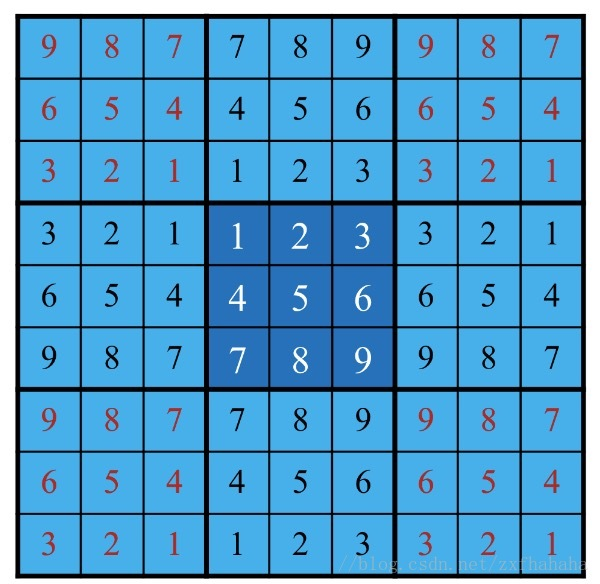
reflection模式(映象)
可以使用以下庫函式:
scipy.ndimage.sobel:使用 Sobel 運算元對輸入影象濾波。
scipy.ndimage.gaussian_filter:使用高斯卷積核對輸入影象濾波。
np.arctan2
scipy.ndimage.filters.maximum_filter:使用最大過濾器過濾輸入影象。
scipy.ndimage.filters.convolve:使用選定的濾波器對輸入影象濾波。
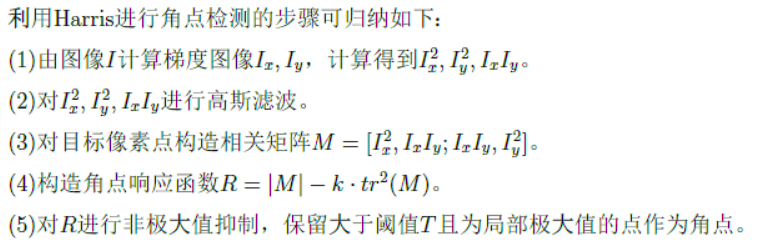
補充完成類 HarrisKeypointDetector 中的三個函式:
computeHarrisValues (TODO 1,為影象中每個畫素計算 Harris 強度函式與方向)
computeLocalMaxima (TODO 2,計算布林矩陣,指示每個畫素是否是區域性最大值)
detectKeypoints (TODO 3,根據畫素的 Harris 強度與是否區域性最大值生成特徵點集合)。