
相機標定之4個座標系之間的變換關係
最近在進行相機標定和相機成像範圍計算時,需要用到相機座標轉換關係中的影象座標到世界座標的轉換,檢索到這篇博文【四個座標系之間的變換關係】,覺得講解簡練清晰易懂,故進行轉載分享如下,供更多人學習。
轉自:https://blog.csdn.net/lyl771857509/article/details/79633412
世界座標系,相機座標系,影象物理座標系,畫素座標系之間的關係:
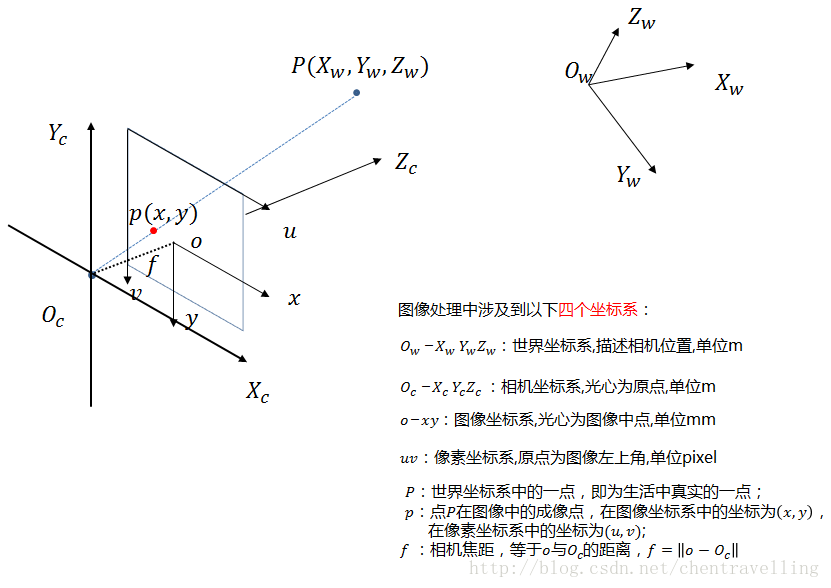
1:世界座標系:根據情況而定,可以表示任何物體,此時是由於相機而引入的。單位m。
2:相機座標系:以攝像機光心為原點(在針孔模型中也就是針孔為關心),z軸與光軸重合也就是z軸指向相機的前方(也就是與成像平面垂直),x軸與y軸的正方向與物體座標系平行,其中上圖中的f為攝像機的焦距。單位m
3:影象物理座標系
4:畫素座標系:以畫素為單位,座標原點在左上角。這也是一些opencv,OpenGL等庫的座標原點選在左上角的原因。當然明顯看出CCD感測器以mm單位到畫素中間有轉換的。舉個例子,CCD感測上上面的8mm x 6mm,轉換到畫素大小是640x480. 假如dx表示畫素座標系中每個畫素的物理大小就是1/80. 也就是說毫米與畫素點的之間關係是piexl/mm.
好了四個座標系都解釋完了,接下來就說下各個座標系中間的變換關係吧。
一、世界座標到相機座標系
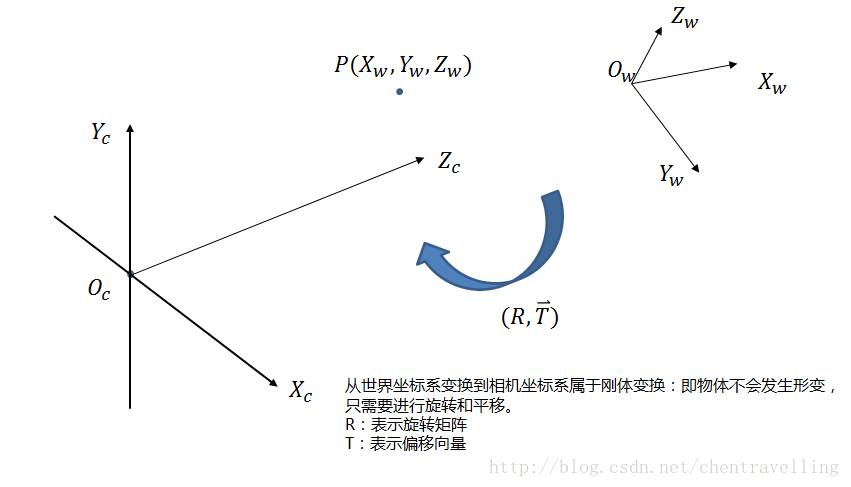
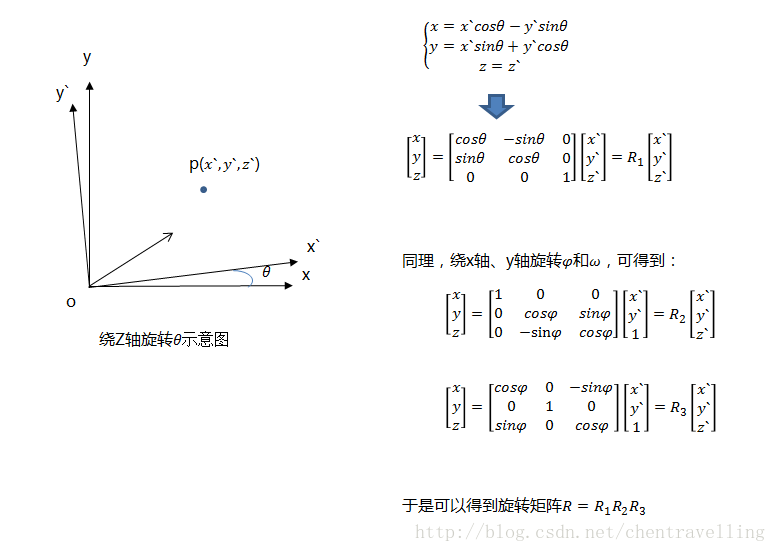
物體之間的座標系變換都可以表示座標系的旋轉變換加上平移變換,則世界座標系到相機座標系的轉換關係也是如此。繞著不同的軸旋轉不同的角度得到不同的旋轉矩陣。如下:
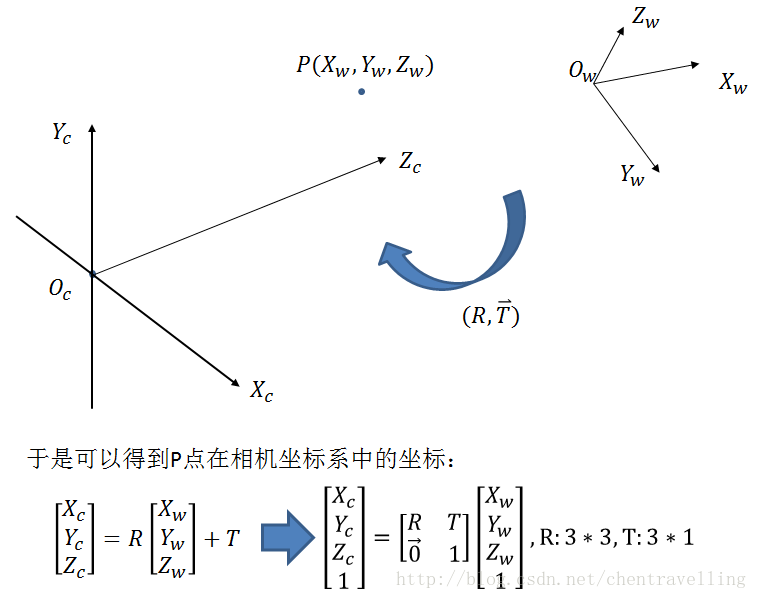
那麼世界座標系到相機座標系的變換如下:
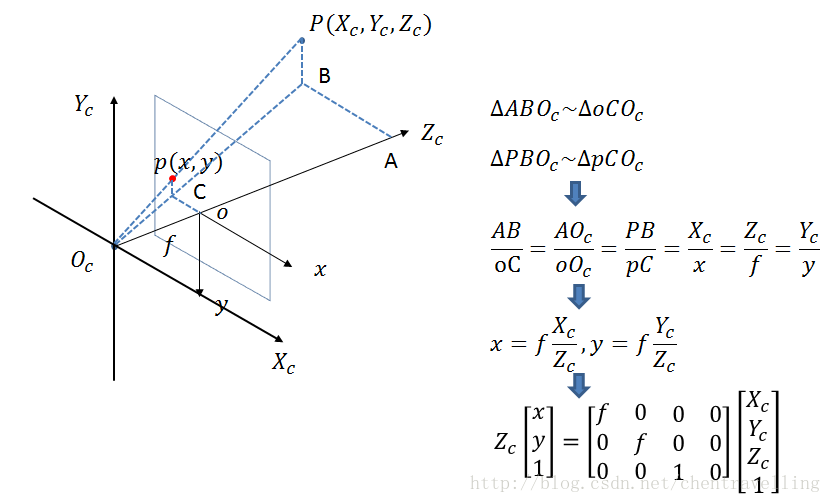
二、相機座標系到影象物理座標系
從相機座標系到影象座標系,屬於透視投影關係,從3D轉換到2D。 也可以看成是針孔模型的改變模型。滿足三角形的相似定理。
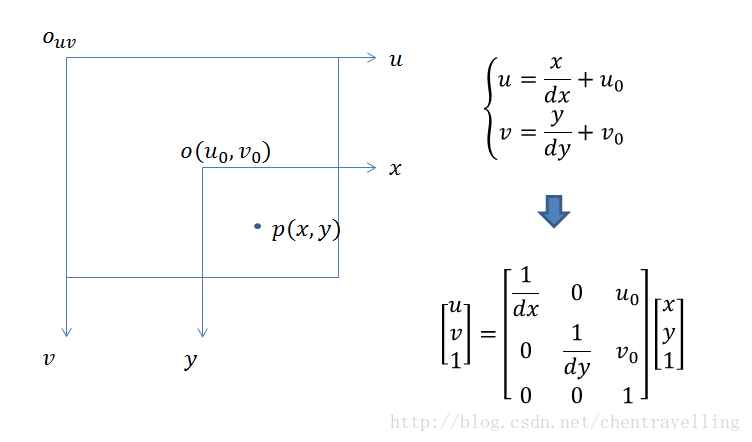
三、影象物理座標系到畫素座標系
此時與前面的座標系變換不同,此時沒有旋轉變換,但是座標原點位置不一致,大小不一致,則設計伸縮變換及平移變換。
綜上所述,大家可以看出四個座標系之間存在著下述關係 ( 矩陣依次左乘 ):
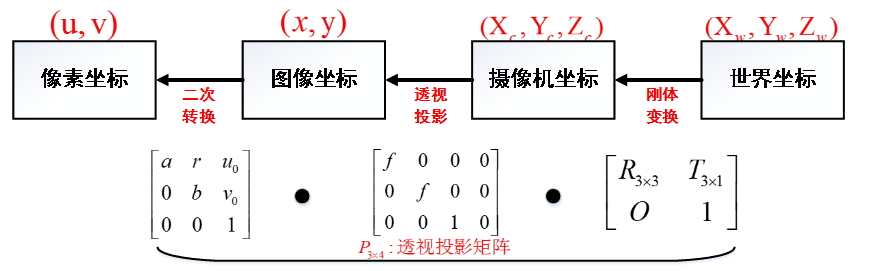
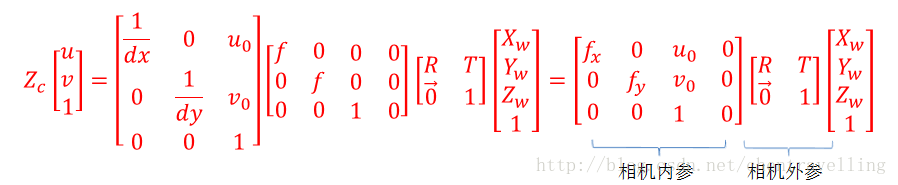
其中相機的內參和外參可以通過張正友標定獲取。
通過最終的轉換關係來看,一個三維中的座標點,的確可以在影象中找到一個對應的畫素點。
但是反過來,通過影象中的一個點找到它在三維中對應的點就很成了一個問題,因為我們並不知道等式左邊的Zc的值。