
DQN從入門到放棄5 深度解讀DQN演算法
分享一下我老師大神的人工智慧教程!零基礎,通俗易懂!http://blog.csdn.net/jiangjunshow
也歡迎大家轉載本篇文章。分享知識,造福人民,實現我們中華民族偉大復興!
0 前言
如果說DQN從入門到放棄的前四篇是開胃菜的話,那麼本篇文章就是主菜了。所以,等吃完主菜再放棄吧!
1 詳解Q-Learning
在上一篇文章DQN從入門到放棄 第四篇中,我們分析了動態規劃Dynamic Programming並且由此引出了Q-Learning演算法。可能一些知友不是特別理解。那麼這裡我們再用簡單的語言描述一下整個思路是什麼。
為了得到最優策略Policy,我們考慮估算每一個狀態下每一種選擇的價值Value有多大。然後我們通過分析發現,每一個時間片的Q(s,a)和當前得到的Reward以及下一個時間片的Q(s,a)有關。有些知友想不通,在一個實驗裡,我們只可能知道當前的Q值,怎麼知道下一個時刻的Q值呢?大家要記住這一點,Q-Learning建立在虛擬環境下無限次的實驗。這意味著可以把上一次實驗計算得到的Q值拿來使用呀。這樣,不就可以根據當前的Reward及上一次實驗中下一個時間片的Q值更新當前的Q值了嗎?說起來真是很拗口。下面用比較形象的方法再具體分析一下Q-Learning。
Q-Learning的演算法如下:
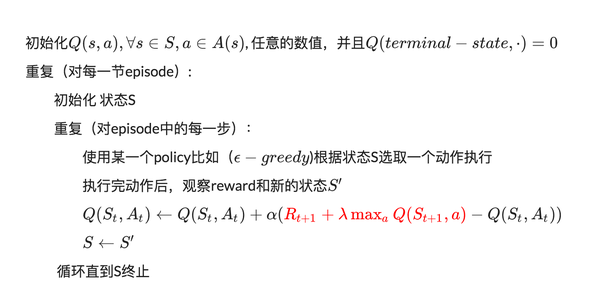
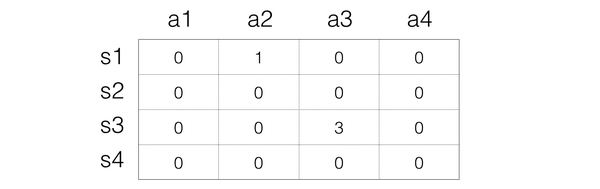
對於Q-Learning,首先就是要確定如何儲存Q值,最簡單的想法就是用矩陣,一個s一個a對應一個Q值,所以可以把Q值想象為一個很大的表格,橫列代表s,縱列代表a,裡面的數字代表Q值,如下表示:
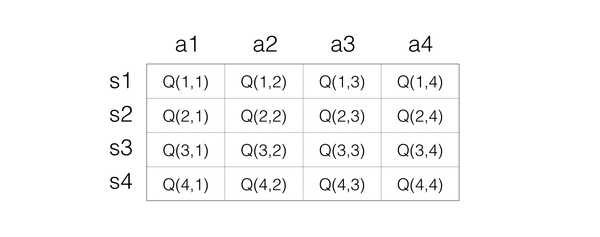 這樣大家就很清楚Q值是怎樣的 了。接下來就是看如何反覆實驗更新。
這樣大家就很清楚Q值是怎樣的 了。接下來就是看如何反覆實驗更新。
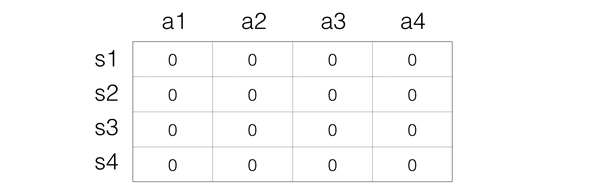
Step 1:初始化Q矩陣,比如都設定為0
Step 2:開始實驗。根據當前Q矩陣及方法獲取動作。比如當前處在狀態s1,那麼在s1一列每一個Q值都是0,那麼這個時候隨便選擇都可以。
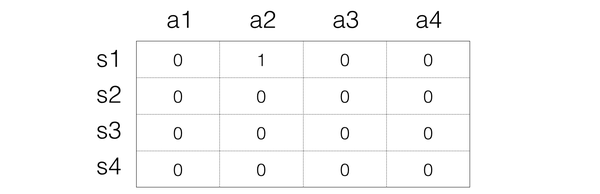
 假設我們選擇a2動作,然後得到的reward是1,並且進入到s3狀態,接下來我們要根據
假設我們選擇a2動作,然後得到的reward是1,並且進入到s3狀態,接下來我們要根據
來更新Q值,這裡我們假設是1,
所以在這裡,就是
那麼對應的s3狀態,最大值是0,所以,Q表格就變成:
 Step 3:接下來就是進入下一次動作,這次的狀態是s3,假設選擇動作a3,然後得到1的reward,狀態變成s1,那麼我們同樣進行更新:
Step 3:接下來就是進入下一次動作,這次的狀態是s3,假設選擇動作a3,然後得到1的reward,狀態變成s1,那麼我們同樣進行更新:
所以Q的表格就變成:
Step 4: 反覆上面的方法。
就是這樣,Q值在試驗的同時反覆更新。直到收斂。
相信這次知友們可以很清楚Q-Learning的方法了。接下來,我們將Q-Learning拓展至DQN。
2 維度災難
在上面的簡單分析中,我們使用表格來表示Q(s,a),但是這個在現實的很多問題上是幾乎不可行的,因為狀態實在是太多。使用表格的方式根本存不下。
舉Atari為例子。
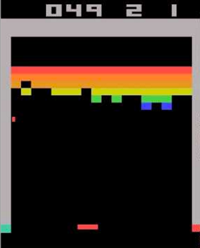 計算機玩Atari遊戲的要求是輸入原始影象資料,也就是210x160畫素的圖片,然後輸出幾個按鍵動作。總之就是和人類的要求一樣,純視覺輸入,然後讓計算機自己玩遊戲。那麼這種情況下,到底有多少種狀態呢?有可能每一秒鐘的狀態都不一樣。因為,從理論上看,如果每一個畫素都有256種選擇,那麼就有:
計算機玩Atari遊戲的要求是輸入原始影象資料,也就是210x160畫素的圖片,然後輸出幾個按鍵動作。總之就是和人類的要求一樣,純視覺輸入,然後讓計算機自己玩遊戲。那麼這種情況下,到底有多少種狀態呢?有可能每一秒鐘的狀態都不一樣。因為,從理論上看,如果每一個畫素都有256種選擇,那麼就有:
這簡直是天文數字。所以,我們是不可能通過表格來儲存狀態的。我們有必要對狀態的維度進行壓縮,解決辦法就是 價值函式近似Value Function Approximation
3 價值函式近似Value Function Approximation
什麼是價值函式近似呢?說起來很簡單,就是用一個函式來表示Q(s,a)。即
f可以是任意型別的函式,比如線性函式:
其中
是函式f的引數。
大家看到了沒有,通過函式表示,我們就可以無所謂s到底是多大的維度,反正最後都通過矩陣運算降維輸出為單值的Q。
這就是價值函式近似的基本思路。
如果我們就用來統一表示函式f的引數,那麼就有
為什麼叫近似,因為我們並不知道Q值的實際分佈情況,本質上就是用一個函式來近似Q值的分佈,所以,也可以說是
4 高維狀態輸入,低維動作輸出的表示問題
對於Atari遊戲而言,這是一個高維狀態輸入(原始影象),低維動作輸出(只有幾個離散的動作,比如上下左右)。那麼怎麼來表示這個函式f呢?
難道把高維s和低維a加在一起作為輸入嗎?
必須承認這樣也是可以的。但總感覺有點彆扭。特別是,其實我們只需要對高維狀態進行降維,而不需要對動作也進行降維處理。
那麼,有什麼更好的表示方法嗎?
當然有,怎麼做呢?
其實就是,只把狀態s作為輸入,但是輸出的時候輸出每一個動作的Q值,也就是輸出一個向量
,記住這裡輸出是一個值,只不過是包含了所有動作的Q值的向量而已。這樣我們就只要輸入狀態s,而且還同時可以得到所有的動作Q值,也將更方便的進行Q-Learning中動作的選擇與Q值更新(這一點後面大家會理解)。
5 Q值神經網路化!
終於到了和深度學習相結合的一步了!
意思很清楚,就是我們用一個深度神經網路來表示這個函式f。
這裡假設大家對深度學習特別是卷積神經網路已經有基本的理解。如果不是很清楚,歡迎閱讀本專欄的CS231n翻譯系列文章。
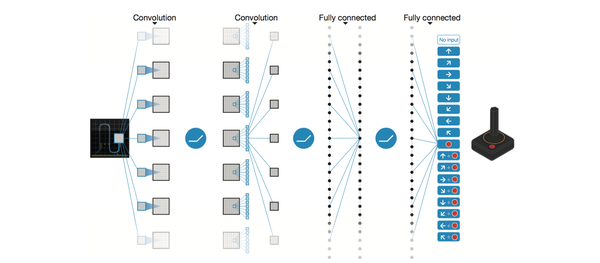 以DQN為例,輸入是經過處理的4個連續的84x84影象,然後經過兩個卷積層,兩個全連線層,最後輸出包含每一個動作Q值的向量。
以DQN為例,輸入是經過處理的4個連續的84x84影象,然後經過兩個卷積層,兩個全連線層,最後輸出包含每一個動作Q值的向量。
對於這個網路的結構,針對不同的問題可以有不同的設定。如果大家熟悉Tensorflow,那麼肯定知道建立一個網路是多麼簡單的一件事。這裡我們就不具體介紹了。我們將在之後的DQN tensorflow實戰篇進行講解。
總之,用神經網路來表示Q值非常簡單,Q值也就是變成用Q網路(Q-Network)來表示。接下來就到了很多人都會困惑的問題,那就是
怎麼訓練Q網路???
6 DQN演算法
我們知道,神經網路的訓練是一個最優化問題,最優化一個損失函式loss function,也就是標籤和網路輸出的偏差,目標是讓損失函式最小化。為此,我們需要有樣本,巨量的有標籤資料,然後通過反向傳播使用梯度下降的方法來更新神經網路的引數。
所以,要訓練Q網路,我們要能夠為Q網路提供有標籤的樣本。
所以,問題變成:
如何為Q網路提供有標籤的樣本?
答案就是利用Q-Learning演算法。
大家回想一下Q-Learning演算法,Q值的更新依靠什麼?依靠的是利用Reward和Q計算出來的目標Q值:
因此,我們把目標Q值作為標籤不就完了?我們的目標不就是讓Q值趨近於目標Q值嗎?
因此,Q網路訓練的損失函式就是
 上面公式是
上面公式是即下一個狀態和動作。這裡用了David Silver的表示方式,看起來比較清晰。
既然確定了損失函式,也就是cost,確定了獲取樣本的方式。那麼DQN的整個演算法也就成型了!
接下來就是具體如何訓練的問題了!
7 DQN訓練
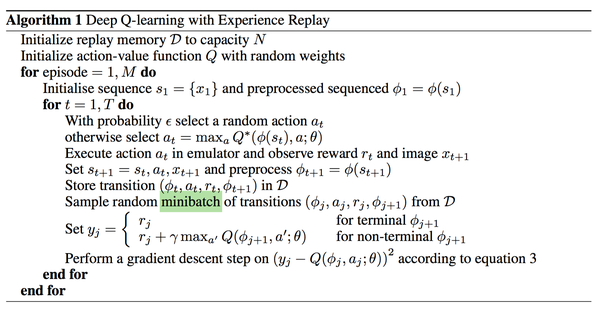
我們這裡分析第一個版本的DQN,也就是NIPS 2013提出的DQN。
 我們分析了這麼久終於到現在放上了DQN演算法,真是不容易。如果沒有一定基礎直接上演算法還真是搞不明白。
我們分析了這麼久終於到現在放上了DQN演算法,真是不容易。如果沒有一定基礎直接上演算法還真是搞不明白。
具體的演算法主要涉及到Experience Replay,也就是經驗池的技巧,就是如何儲存樣本及取樣問題。
由於玩Atari採集的樣本是一個時間序列,樣本之間具有連續性,如果每次得到樣本就更新Q值,受樣本分佈影響,效果會不好。因此,一個很直接的想法就是把樣本先存起來,然後隨機取樣如何?這就是Experience Replay的意思。按照腦科學的觀點,人的大腦也具有這樣的機制,就是在回憶中學習。
那麼上面的演算法看起來那麼長,其實就是反覆試驗,然後儲存資料。接下來資料存到一定程度,就每次隨機採用資料,進行梯度下降!
也就是
在DQN中增強學習Q-Learning演算法和深度學習的SGD訓練是同步進行的!
通過Q-Learning獲取無限量的訓練樣本,然後對神經網路進行訓練。
樣本的獲取關鍵是計算y,也就是標籤。
8 小結
好了,說到這,DQN的基本思路就介紹完了,不知道大家理解得怎麼樣?在下一篇文章中,我們將分析DQN在這一年來的發展變化!感謝知友們的關注!
文中圖片引用自
[1] Mnih, Volodymyr, et al. "Playing atari with deep reinforcement learning." arXiv preprint arXiv:1312.5602 (2013).
[2] Mnih, Volodymyr, et al. "Human-level control through deep reinforcement learning."Nature 518.7540 (2015): 529-533.
版權宣告:本文為原創文章,未經允許不得轉載!
給我老師的人工智慧教程打call!http://blog.csdn.net/jiangjunshow
