
usb host分析
1:usb入口函式:usb_init
參考文件:
https://blog.csdn.net/chenliang0224/article/details/79692045
註冊一個匯流排bus_register:bus_type:usb_bus_type
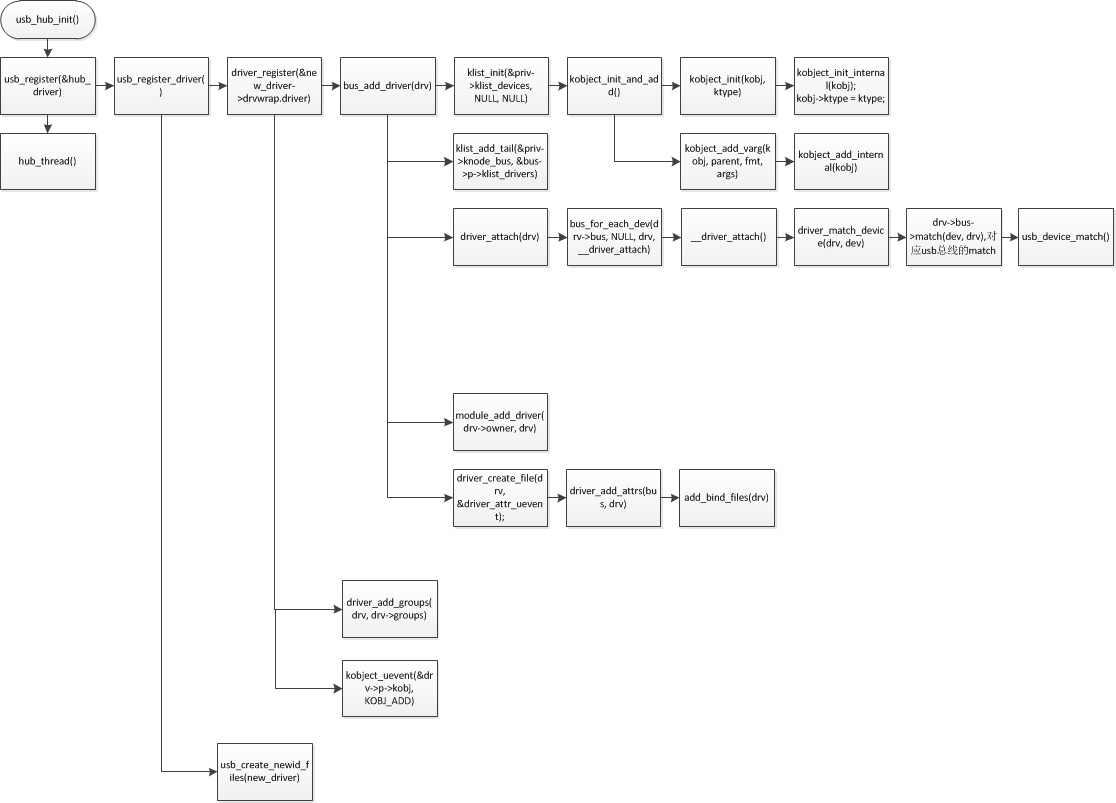
呼叫usb_hub_init()用來建立hub初始化,註冊一個基於usb的urb的usb_driver結構體,usb_driver的open函式hub_probe:
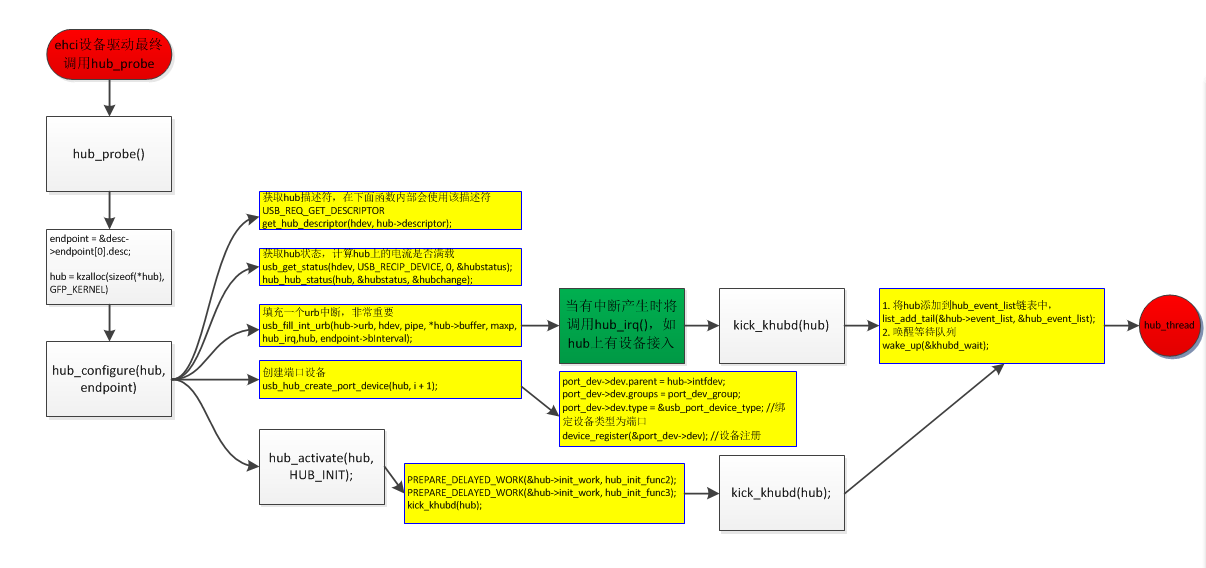
hub_probe中呼叫hub_configure函式。
每當裝置連線到usb介面時,usb匯流排在查詢hub狀態資訊會觸發hub的中斷hub_irq,利用kick_khubd將hub結構通過event_list新增到khubd的佇列hub_event_list,然後喚醒khudb,進入hub_e_vents函式,處理khudb事件佇列,從khubd的hub_event_list中的每個usb_hub資料結構。
建立一個hub_thread執行緒,呼叫hub_events();呼叫hub_port_connect_change(物理邏輯更改就呼叫該函式)
usb_alloc_dev()然後對每個函式呼叫usb的裝置建構函式hub_port_init(復位usb3.0得到裝置描述符),
檢查裝置的執行速度check_highspeed()
usb_new_device()建立一個新的device裝置。
Hub_probe流程圖:
關於usb_host的驅動:(ehci)
usb_register_device_driver(&usb_generic_driver, THIS_MODULE); 註冊一個裝置驅動:usb_generic_driver
usb_device_driver:定義一個usb裝置驅動
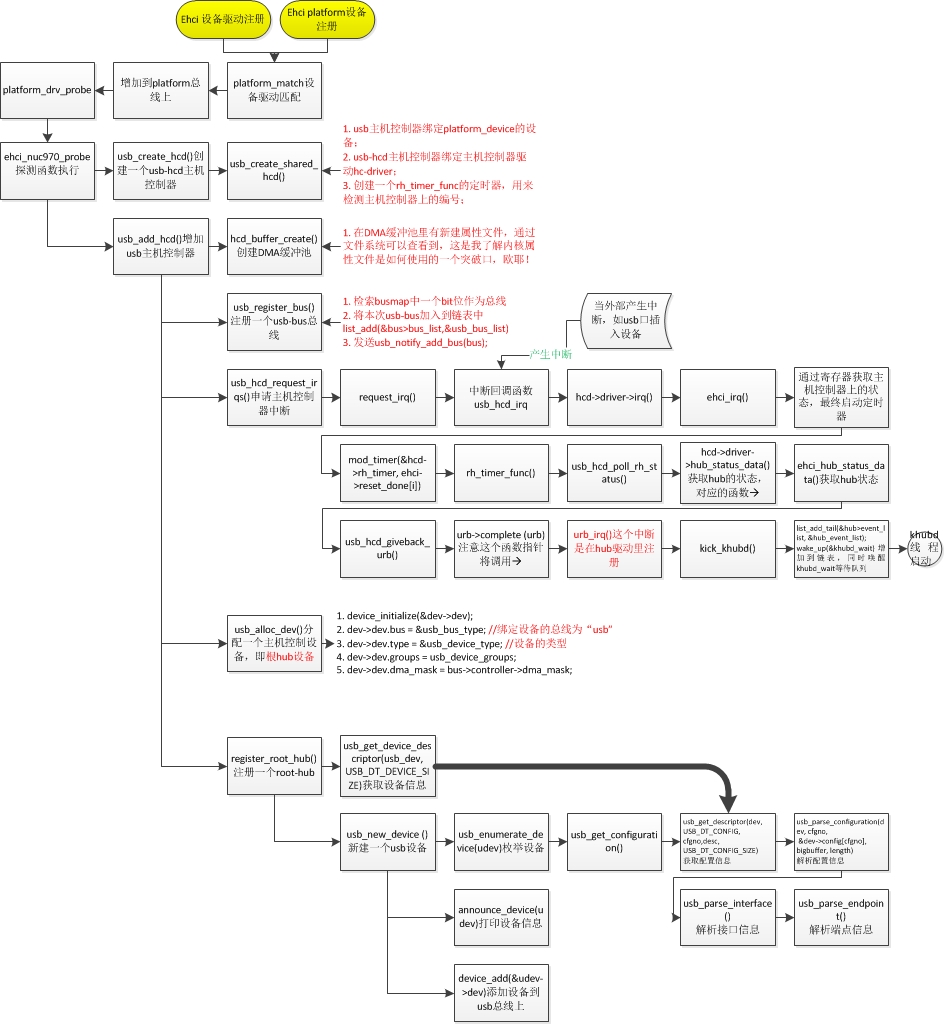
ehci設備註冊:
static struct platform_device hiusb_ehci_platdev = {
.name = "hiusb-ehci", //匹配裝置驅動
.id = 0,
.dev = {
.platform_data = NULL,
.dma_mask = &usb_dmamask,
.coherent_dma_mask = DMA_BIT_MASK(32),
.release = usb_ehci_platdev_release,
},
.num_resources = ARRAY_SIZE(hiusb_ehci_res),
.resource = hiusb_ehci_res,
};
裝置資源:
static struct resource hiusb_ehci_res[] = {
[0] = {
.start = CONFIG_HIUSB_EHCI_IOBASE,
.end = CONFIG_HIUSB_EHCI_IOBASE
+ CONFIG_HIUSB_EHCI_IOSIZE - 1,
.flags = IORESOURCE_MEM,
},
[1] = {
.start = CONFIG_HIUSB_EHCI_IRQNUM,
.end = CONFIG_HIUSB_EHCI_IRQNUM,
.flags = IORESOURCE_IRQ,
},
};
平臺驅動註冊:
static struct platform_driver hiusb_ehci_hcd_driver = {
.probe = hiusb_ehci_hcd_drv_probe,
.remove = hiusb_ehci_hcd_drv_remove,
.shutdown = usb_hcd_platform_shutdown,
.driver = {
.name = "hiusb-ehci",
.owner = THIS_MODULE,
.pm = HIUSB_EHCI_PMOPS,
}
};
平臺裝置和平臺驅動通過hiusb-ehci匹配,匹配成功呼叫平臺驅動的hiusb_ehci_hcd_drv_probe函式
平臺探測函式
static int hiusb_ehci_hcd_drv_probe(struct platform_device *pdev)
{
struct usb_hcd *hcd;
struct ehci_hcd *ehci;
struct resource *res;
int ret;
if (usb_disabled())
return -ENODEV;
if (pdev->resource[1].flags != IORESOURCE_IRQ) {
pr_debug("resource[1] is not IORESOURCE_IRQ");
return -ENOMEM;
}
hcd = usb_create_hcd(&hiusb_ehci_hc_driver, &pdev->dev, "hiusb-ehci");
if (!hcd)
return -ENOMEM;
res = platform_get_resource(pdev, IORESOURCE_MEM, 0);
hcd->rsrc_start = res->start;
hcd->rsrc_len = resource_size(res);
if (!request_mem_region(hcd->rsrc_start, hcd->rsrc_len, hcd_name)) {
pr_debug("request_mem_region failed");
ret = -EBUSY;
goto err1;
}
hcd->regs = ioremap(hcd->rsrc_start, hcd->rsrc_len);
if (!hcd->regs) {
pr_debug("ioremap failed");
ret = -ENOMEM;
goto err2;
}
hiusb_start_hcd();
ehci = hcd_to_ehci(hcd);
ehci->caps = hcd->regs;
ehci->regs = hcd->regs +
HC_LENGTH(ehci, readl(&ehci->caps->hc_capbase));
/* cache this readonly data; minimize chip reads */
ehci->hcs_params = readl(&ehci->caps->hcs_params);
ret = usb_add_hcd(hcd, pdev->resource[1].start,
IRQF_DISABLED | IRQF_SHARED);
if (ret == 0) {
platform_set_drvdata(pdev, hcd);
return ret;
}
hiusb_stop_hcd();
iounmap(hcd->regs);
err2:
release_mem_region(hcd->rsrc_start, hcd->rsrc_len);
err1:
usb_put_hcd(hcd);
return ret;
}
探測函式通過usb_create_hcd呼叫了ehci的主機控制驅動:
static const struct hc_driver hiusb_ehci_hc_driver = {
.description = hcd_name, //hcd主機控制器名稱
.product_desc = "HIUSB EHCI",
.hcd_priv_size = sizeof(struct ehci_hcd), //hcd主機控制器大小
/*
* generic hardware linkage
*/
.irq = ehci_irq,//ehci的硬體中斷
.flags = HCD_MEMORY | HCD_USB2, //usb2.0
/*
* basic lifecycle operations
*
* FIXME -- ehci_init() doesn't do enough here.
* See ehci-ppc-soc for a complete implementation.
*/
.reset = hiusb_ehci_setup, //復位主機
.start = ehci_run, //啟動主機控制器
.stop = ehci_stop,
.shutdown = ehci_shutdown,
/*
* managing i/o requests and associated device resources
*/
.urb_enqueue = ehci_urb_enqueue, //urb請求佇列
.urb_dequeue = ehci_urb_dequeue, //釋放佇列
.endpoint_disable = ehci_endpoint_disable, //端點禁止
.endpoint_reset = ehci_endpoint_reset,
/*
* scheduling support
*/
.get_frame_number = ehci_get_frame,
/*
* root hub support
*/
.hub_status_data = ehci_hub_status_data, //獲取hub狀態
.hub_control = ehci_hub_control,
.bus_suspend = ehci_bus_suspend,
.bus_resume = ehci_bus_resume,
.relinquish_port = ehci_relinquish_port,
.port_handed_over = ehci_port_handed_over,
.clear_tt_buffer_complete = ehci_clear_tt_buffer_complete,
};
usb_create_hcd:usb主機控制器建立(hcd.c)
struct usb_hcd *usb_create_shared_hcd(const struct hc_driver *driver,
struct device *dev, const char *bus_name,
struct usb_hcd *primary_hcd)
{
struct usb_hcd *hcd;
hcd = kzalloc(sizeof(*hcd) + driver->hcd_priv_size, GFP_KERNEL);
if (!hcd) {
dev_dbg (dev, "hcd alloc failed\n");
return NULL;
}
if (primary_hcd == NULL) {
hcd->bandwidth_mutex = kmalloc(sizeof(*hcd->bandwidth_mutex),
GFP_KERNEL);
if (!hcd->bandwidth_mutex) {
kfree(hcd);
dev_dbg(dev, "hcd bandwidth mutex alloc failed\n");
return NULL;
}
mutex_init(hcd->bandwidth_mutex);
dev_set_drvdata(dev, hcd);
} else {
hcd->bandwidth_mutex = primary_hcd->bandwidth_mutex;
hcd->primary_hcd = primary_hcd;
primary_hcd->primary_hcd = primary_hcd;
hcd->shared_hcd = primary_hcd;
primary_hcd->shared_hcd = hcd;
}
kref_init(&hcd->kref);
- usb_bus_init(&hcd->self); //usb_hcd作為一個匯流排初始化
hcd->self.controller = dev;
hcd->self.bus_name = bus_name;
hcd->self.uses_dma = (dev->dma_mask != NULL);
init_timer(&hcd->rh_timer);
hcd->rh_timer.function = rh_timer_func;
hcd->rh_timer.data = (unsigned long) hcd;
#ifdef CONFIG_USB_SUSPEND
INIT_WORK(&hcd->wakeup_work, hcd_resume_work);
#endif
hcd->driver = driver;//usb_hcd主機控制器繫結主機控制器驅動driver
hcd->speed = driver->flags & HCD_MASK;
hcd->product_desc = (driver->product_desc) ? driver->product_desc :
"USB Host Controller";
return hcd;
}
a> struct usb_hcd usb主機控制器
b> struct hc_driver 主機控制器驅動
c> struct usb_bus self 匯流排
d> struct usb_device *rhdev 裝置
usb主機控制器新增
int usb_add_hcd(struct usb_hcd *hcd,
unsigned int irqnum, unsigned long irqflags)
{
int retval;
struct usb_device *rhdev;
dev_info(hcd->self.controller, "%s\n", hcd->product_desc);
/* Keep old behaviour if authorized_default is not in [0, 1]. */
if (authorized_default < 0 || authorized_default > 1)
hcd->authorized_default = hcd->wireless? 0 : 1;
else
hcd->authorized_default = authorized_default;
set_bit(HCD_FLAG_HW_ACCESSIBLE, &hcd->flags);
/* HC is in reset state, but accessible. Now do the one-time init,
* bottom up so that hcds can customize the root hubs before khubd
* starts talking to them. (Note, bus id is assigned early too.)
*/
if ((retval = hcd_buffer_create(hcd)) != 0) { //分配一個dma池:具體dma的分配可以檢視該函式
dev_dbg(hcd->self.controller, "pool alloc failed\n");
return retval;
}
if ((retval = usb_register_bus(&hcd->self)) < 0)//註冊一個usb_bus
goto err_register_bus;
if ((rhdev = usb_alloc_dev(NULL, &hcd->self, 0)) == NULL) { //分配一個dev裝置
dev_err(hcd->self.controller, "unable to allocate root hub\n");
retval = -ENOMEM;
goto err_allocate_root_hub;
}
hcd->self.root_hub = rhdev;
switch (hcd->speed) {
case HCD_USB11:
rhdev->speed = USB_SPEED_FULL;
break;
case HCD_USB2:
rhdev->speed = USB_SPEED_HIGH;
break;
case HCD_USB3:
rhdev->speed = USB_SPEED_SUPER;
break;
default:
retval = -EINVAL;
goto err_set_rh_speed;
}
/* wakeup flag init defaults to "everything works" for root hubs,
* but drivers can override it in reset() if needed, along with
* recording the overall controller's system wakeup capability.
*/
device_set_wakeup_capable(&rhdev->dev, 1);
/* HCD_FLAG_RH_RUNNING doesn't matter until the root hub is
* registered. But since the controller can die at any time,
* let's initialize the flag before touching the hardware.
*/
set_bit(HCD_FLAG_RH_RUNNING, &hcd->flags);
/* "reset" is misnamed; its role is now one-time init. the controller
* should already have been reset (and boot firmware kicked off etc).
*/
if (hcd->driver->reset && (retval = hcd->driver->reset(hcd)) < 0) {
dev_err(hcd->self.controller, "can't setup\n");
goto err_hcd_driver_setup;
}
hcd->rh_pollable = 1;
/* NOTE: root hub and controller capabilities may not be the same */
if (device_can_wakeup(hcd->self.controller)
&& device_can_wakeup(&hcd->self.root_hub->dev))
dev_dbg(hcd->self.controller, "supports USB remote wakeup\n");
/* enable irqs just before we start the controller,
* if the BIOS provides legacy PCI irqs.
*/
if (usb_hcd_is_primary_hcd(hcd) && irqnum) {
retval = usb_hcd_request_irqs(hcd, irqnum, irqflags);
if (retval)
goto err_request_irq;
}
hcd->state = HC_STATE_RUNNING;
retval = hcd->driver->start(hcd);
if (retval < 0) {
dev_err(hcd->self.controller, "startup error %d\n", retval);
goto err_hcd_driver_start;
}
/* starting here, usbcore will pay attention to this root hub */
if ((retval = register_root_hub(hcd)) != 0)
goto err_register_root_hub;
retval = sysfs_create_group(&rhdev->dev.kobj, &usb_bus_attr_group);
if (retval < 0) {
printk(KERN_ERR "Cannot register USB bus sysfs attributes: %d\n",
retval);
goto error_create_attr_group;
}
if (hcd->uses_new_polling && HCD_POLL_RH(hcd))
usb_hcd_poll_rh_status(hcd);
/*
* Host controllers don't generate their own wakeup requests;
* they only forward requests from the root hub. Therefore
* controllers should always be enabled for remote wakeup.
*/
device_wakeup_enable(hcd->self.controller);
return retval;
error_create_attr_group:
clear_bit(HCD_FLAG_RH_RUNNING, &hcd->flags);
if (HC_IS_RUNNING(hcd->state))
hcd->state = HC_STATE_QUIESCING;
spin_lock_irq(&hcd_root_hub_lock);
hcd->rh_registered = 0;
spin_unlock_irq(&hcd_root_hub_lock);
#ifdef CONFIG_USB_SUSPEND
cancel_work_sync(&hcd->wakeup_work);
#endif
mutex_lock(&usb_bus_list_lock);
usb_disconnect(&rhdev); /* Sets rhdev to NULL */
mutex_unlock(&usb_bus_list_lock);
err_register_root_hub:
hcd->rh_pollable = 0;
clear_bit(HCD_FLAG_POLL_RH, &hcd->flags);
del_timer_sync(&hcd->rh_timer);
hcd->driver->stop(hcd);
hcd->state = HC_STATE_HALT;
clear_bit(HCD_FLAG_POLL_RH, &hcd->flags);
del_timer_sync(&hcd->rh_timer);
err_hcd_driver_start:
if (usb_hcd_is_primary_hcd(hcd) && hcd->irq > 0)
free_irq(irqnum, hcd);
err_request_irq:
err_hcd_driver_setup:
err_set_rh_speed:
usb_put_dev(hcd->self.root_hub);
err_allocate_root_hub:
usb_deregister_bus(&hcd->self);
err_register_bus:
hcd_buffer_destroy(hcd);
return retval;
}
usb_alloc_dev()分配一個dev裝置:
struct usb_device *usb_alloc_dev(struct usb_device *parent,
struct usb_bus *bus, unsigned port1)
parent表示hub裝置被連線,如果為空,則建立一個root的hub
建立dma池
int hcd_buffer_create(struct usb_hcd *hcd)
{
char name[16];
int i, size;
if (!hcd->self.controller->dma_mask &&
!(hcd->driver->flags & HCD_LOCAL_MEM))
return 0;
for (i = 0; i < HCD_BUFFER_POOLS; i++) {
size = pool_max[i];
if (!size)
continue;
snprintf(name, sizeof name, "buffer-%d", size);
hcd->pool[i] = dma_pool_create(name, hcd->self.controller,
size, size, 0);
if (!hcd->pool[i]) {
hcd_buffer_destroy(hcd);
return -ENOMEM;
}
}
return 0;
}
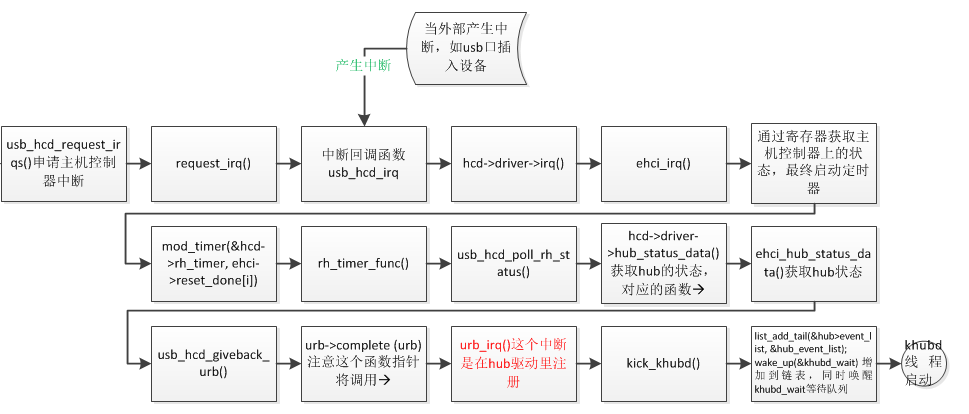
usb_hcd_request_irqs():申請一個hcd中斷定時器
在usb_add_hcd建立usb_hcd_request_irqs:用來建立和呼叫中斷(中斷的建立)
static int usb_hcd_request_irqs(struct usb_hcd *hcd,
unsigned int irqnum, unsigned long irqflags)
{
int retval;
if (hcd->driver->irq) {
/* IRQF_DISABLED doesn't work as advertised when used together
* with IRQF_SHARED. As usb_hcd_irq() will always disable
* interrupts we can remove it here.
*/
if (irqflags & IRQF_SHARED)
irqflags &= ~IRQF_DISABLED;
snprintf(hcd->irq_descr, sizeof(hcd->irq_descr), "%s:usb%d",
hcd->driver->description, hcd->self.busnum);
retval = request_irq(irqnum, &usb_hcd_irq, irqflags,
hcd->irq_descr, hcd);
if (retval != 0) {
dev_err(hcd->self.controller,
"request interrupt %d failed\n",
irqnum);
return retval;
}
hcd->irq = irqnum;
dev_info(hcd->self.controller, "irq %d, %s 0x%08llx\n", irqnum,
(hcd->driver->flags & HCD_MEMORY) ?
"io mem" : "io base",
(unsigned long long)hcd->rsrc_start);
} else {
hcd->irq = 0;
if (hcd->rsrc_start)
dev_info(hcd->self.controller, "%s 0x%08llx\n",
(hcd->driver->flags & HCD_MEMORY) ?
"io mem" : "io base",
(unsigned long long)hcd->rsrc_start);
}
return 0;
}
註冊一個root的hub分配器register_root_hub():中的函式建立和流程
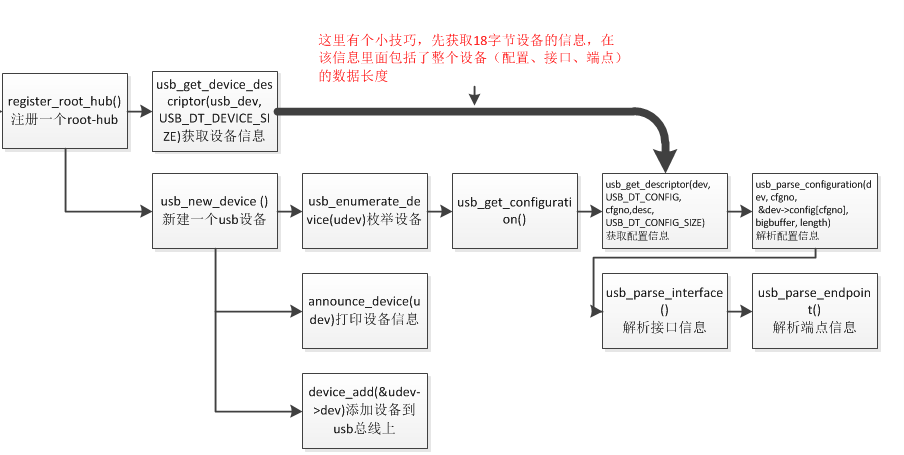
在register_root_hub()中建立usb_get_device_descriptor()
建立一個usb裝置:usb_new_device()
//在usb_new_device中呼叫usb_enumerate_device()函式中列舉設定
獲取usb的配置資訊usb_get_configuration,給usb裝置分配一個編號,獲取裝置描述符usb_get_device_descriptor(usb_dev, USB_DT_DEVICE_SIZE),因為不知道裝置描述符的裡面有多少配置,配置有多少個介面,所以這裡直接讀取USB_DT_DEVICE_SIZE,而這個位元組長度恰好對應裝置描述符的基金額狗踢長度。
讀取配置引數usb_parse_configuration
解析介面資訊:usb_parse_interface
解析端點函式usb_parse_endpoint
端點的主要 工作:根據不同的usb,傳輸不同的位元組數,
在通過如下函式輸出控制資訊功能:announce_device
通過platform匯流排完成ehci裝置和驅動的匹配探測函式,完成主機控制器,和暫存器資源分配,分配一個hcd主機控制器(是否使用dma池),增加主句控制器到usb 總線上,註冊一個跟hub,期間包含最重要的部分,在獲取介面資訊時分兩次讀取,第一次讀取固定長度的介面資訊,第二次根據第一個的描述符裡面的資訊長度讀取整個介面資訊,根據藉口資訊解析端點,最後將該主機控制器的根hub註冊到usb總線上。