
ubuntu 下pycharm 構建ROS程式設計環境
1 安裝和破解pycharm
1.1 解壓下載好的pycharm包
1.2 下載破解檔案JetbrainsCrack-3.1-release-enc.jar
並複製到/pycharm-2018.1.4/bin資料夾下。
1.2.1 安裝JetbrainsCrack-3.1-release-enc.jar需要java環境
參考此處安裝java
link:https://www.linuxidc.com/Linux/2016-11/136958.htm
1.2.2 安裝JetbrainsCrack-3.1-release-enc.jar
$ sudo java -jar JetbrainsCrack.2.6.2.jar >> Usage: 1. Copy the jar file to bin directory. 2. Modify “bin/*[idea|clion|…][64].vmoptions” file. Append “-javaagent:JetbrainsCrack.jar” to end line. 3. Run *[idea|clion|…].sh. 4. Entry any character. 5. If you need modify “licenseeName”, please modify and using key: { “licenseId”:”ThisCrackLicenseId”, “licenseeName”:”Rover12421”, “assigneeName”:”“, “assigneeEmail”:”[email protected]”, “licenseRestriction”:”For Rover12421 Crack, Only Test! Please support genuine!!!”, “checkConcurrentUse”:false, “products”:[ {“code”:”II”,”paidUpTo”:”2099-12-31”}, {“code”:”DM”,”paidUpTo”:”2099-12-31”}, {“code”:”AC”,”paidUpTo”:”2099-12-31”}, {“code”:”RS0”,”paidUpTo”:”2099-12-31”}, {“code”:”WS”,”paidUpTo”:”2099-12-31”}, {“code”:”DPN”,”paidUpTo”:”2099-12-31”}, {“code”:”RC”,”paidUpTo”:”2099-12-31”}, {“code”:”PS”,”paidUpTo”:”2099-12-31”}, {“code”:”DC”,”paidUpTo”:”2099-12-31”}, {“code”:”RM”,”paidUpTo”:”2099-12-31”}, {“code”:”CL”,”paidUpTo”:”2099-12-31”}, {“code”:”PC”,”paidUpTo”:”2099-12-31”}, {“code”:”DB”,”paidUpTo”:”2099-12-31”} ], “hash”:”2911276/0”, “gracePeriodDays”:7, “autoProlongated”:false} 6. If show error msg : “Error opening zip file or JAR manifest missing : JetbrainsCrack.jar” please modify the jar file path to absolute path in “bin/*[idea|clion|…][64].vmoptions” file.
1.3 開啟bin資料夾下的pycharm64.vmoptions檔案,在最後一行新增
-javaagent:<JetbrainsCrack-3.1-release-enc.jar的絕對地址>/JetbrainsCrack-3.1-release-enc.jar1.4 安裝pycharm
./pycharm.sh1.5 跳出啟用,選擇中間的,隨便輸啟用碼都行,然後active
1.6 安裝完成後,開啟工程在file----settings-----project interpreter設定python環境。如圖所示
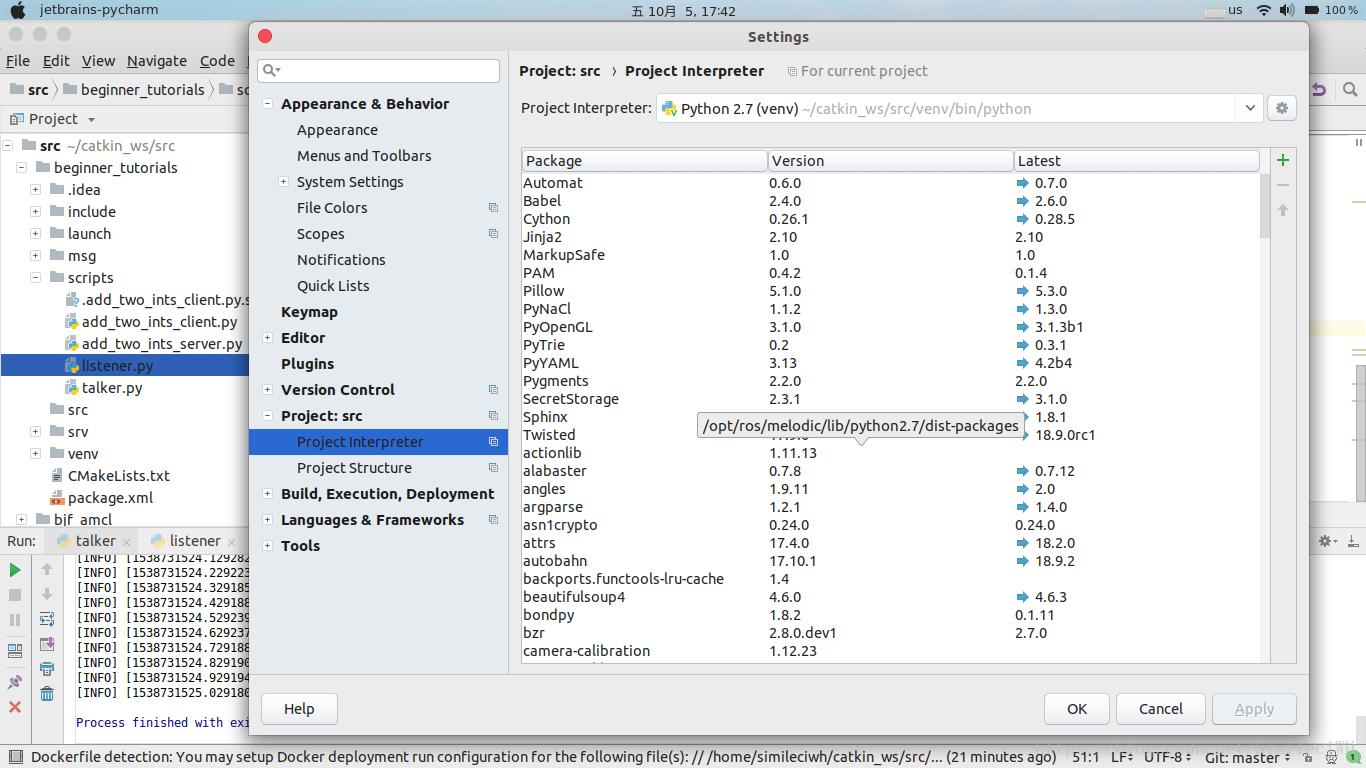
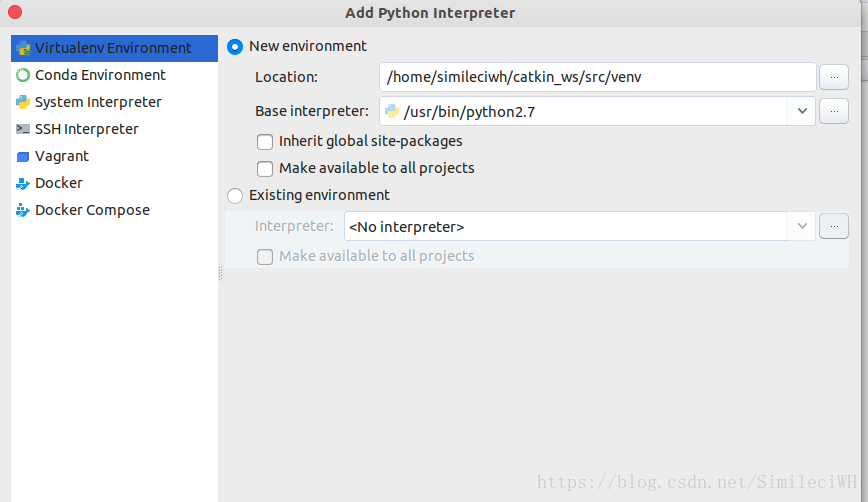
注意為了防止不必要的python庫載入錯誤,和ROS庫或者你的庫加載出錯,這裡勾選了inherit global site-packages和Make available to all projects這兩個選項。
2 因為pycharm無法建立ROS的工程,因此需要自己先用commend-line中的catkin tool構建ros的包
3 然後pycharm---->open project(選擇對應的資料夾)---->找到你的python檔案,或者建立python檔案開始編寫。完成後選擇debug即可,看到效果。
4 我遇到的問題。
我在新增msg後,import始終沒法找到我的msg模組,原因是因為python_path中不包含你的msg的py檔案。檢視後發現,在~/your workspace/devel/lib/python2.7/dist-packages下的包中/msg下有對應的python檔案及module。這說明不是建立msg的方法不對。
通過:
>>> import sys
>>> sys.path可以檢視當前的pycharm包含的python路徑。
經過核查,確實不包含我的路徑。
最有效果的解決辦法是:增加.pth檔案
在site-packages新增一個路徑檔案,如mypkpath.pth,必須以.pth為字尾,寫上你要加入的模組檔案所在的目錄名稱。
linux(ubuntu)
/usr/local/lib/python2.7/dist-packages
下建立一個.pth檔案,並寫入你的包的絕對路徑即可。例如myROSpkg.pth---------檔案中直接貼上絕對路徑例如/home/<user name>/<your workspace>/devel/lib/python2.7/dict-packages
即可解決問題。
5 pycharm開啟指令碼報錯Gtk-Message: Failed to load module "canberra-gtk-module"
解決辦法:
sudo apt-get install libcanberra-gtk-module
6 pycharm的解除安裝
6.1 刪除安裝資料夾目錄
6.2 在home資料夾下有.Pycharm的隱藏配置目錄,也刪掉就可以了。
7 建立桌面快捷方式和命令列快捷方式
在tools----create command-line Launcher和create Desktop Entry
要注意建立的桌面快捷啟動,沒法自動載入ROS開發環境,需要對快捷方式檔案修改
sudo gedit /usr/share/applications/jetbrains-pycharm.desktop修改如下:
[Desktop Entry]
Version=1.0
Type=Application
Name=PyCharm Professional Edition
Icon=/home/<usr name >/software/pycharm-professional-2018.1.4/pycharm-2018.1.4/bin/pycharm.png
Exec="/home/<usr name >/software/pycharm-professional-2018.1.4/pycharm-2018.1.4/bin/pycharm.sh" %f
Comment=The Drive to Develop
Categories=Development;IDE;
Terminal=false
StartupWMClass=jetbrains-pycharm在Exec="/home/<usr name >/software/pycharm-professional-2018.1.4/pycharm-2018.1.4/bin/pycharm.sh" %f這行之前加上
bash -i -c,向這樣
Exec=bash -i -c "/home/<usr name >/software/pycharm-professional-2018.1.4/pycharm-2018.1.4/bin/pycharm.sh" %f即可解決,無法自動載入ROS環境的問題。