
模型預測控制MPC
模型預測控制MPC
因本人剛開始寫部落格,學識經驗有限,如有不正之處望讀者指正,不勝感激;也望藉此平臺留下學習筆記以溫故而知新。這一篇文章介紹的是控制理論中的模型預測控制演算法。
模型預測控制簡介
模型預測控制MPC是指:在每一個取樣時刻通過求解一個有限時域的開環最優控制策略,是一種通過將過程的當前狀態作為最優控制問題的初始狀態,解得的最優控制序列只實施於下一時刻的控制方法。
模型預測控制原理
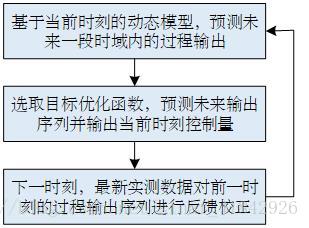
預測控制演算法的三要素:內部預測模型,滾動優化,反饋校正。
預測模型:根據被控物件的歷史資訊和未來輸入資訊,預測系統的未來輸出響應;
滾動優化:通過某一效能指標的最優化求解未來有限時刻的最優控制率;
反饋校正:首先檢驗物件的實際輸出,再通過實際輸出對基於模型的預測輸出進行修正並進行新的優化。
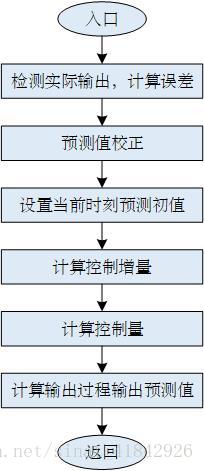
典型的MPC流程圖:
基於非引數模型的預測控制代表演算法
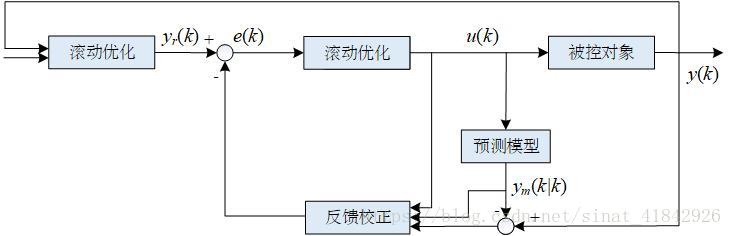
模型演算法控制 MAC
目的:使系統的輸出沿著預先給定的參考軌跡逐漸到達設定值。
演算法組成:預測模型、反饋校正、參考軌跡、滾動優化
其預測模型輸出由兩部分組成:過去已知控制量產生的預測模型輸出、由現在和未來控制量產生的預測模型輸出。
MAC演算法原理圖:
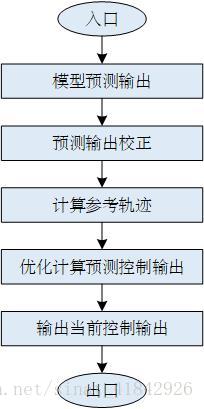
MAC線上計算程式流程圖:
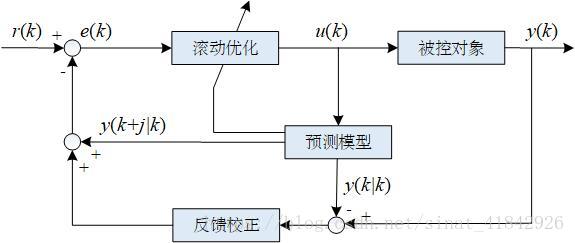
動態矩陣控制 DMC
演算法組成:階躍響應模型預測、反饋校正、滾動優化
其預測模型輸出由兩部分組成:待求解的未知控制增量產生的輸出值、過去控制量產生的已知輸出初值。
DMC演算法原理圖:
DMC線上計算程式流程圖:
MPC演算法的特點
模型要求不高,不需要深入的瞭解過程內部機理;
適用約束條件、大純滯後、非最小相位及非線性等過程;
滾動優化策略能彌補外部因素引起的不確定性,動態效能較好;
缺點:不能描述不穩定系統,不適用於不穩定物件;系統模型線上辨識比較困難。
MPC演算法的個人理解
通過內部的某種機制進行系統的線上辨識,以獲得動態的狀態方程,然後根據當前時刻的狀態方程去獲得後面一段有限時域內多個時刻的控制輸入,並使用預測序列的第一個時刻控制量,如此往復,其本質就是不停的預測系統參考輸入。
參考文獻
自動控制原理與技術研究 孔憲光.殷磊著。
http://www.docin.com/p-100117827.html?docfrom=rrela