Kinect2通過ROS跑ORB_SLAM2 下RGB-D介面
寫在前面
上一篇文章,記錄了Ubuntu下安裝Kinect2的驅動,以及在ROS下執行bridge.現在已經迫不及待的要跑下ORB-SLAM2下的RGB-D介面。
修改ORB-SLAM2
安裝好Kinect2的驅動後,執行:
roslaunch kinect_bridge kinect_bridge.launch然後執行以下命令查詢ROS釋出的話題
rostopic list話題如下:
/kinect2/bond /kinect2/hd/camera_info /kinect2/hd/image_color /kinect2/hd/image_color/compressed /kinect2/hd/image_color_rect /kinect2/hd/image_color_rect/compressed /kinect2/hd/image_depth_rect /kinect2/hd/image_depth_rect/compressed /kinect2/hd/image_mono /kinect2/hd/image_mono/compressed /kinect2/hd/image_mono_rect /kinect2/hd/image_mono_rect/compressed /kinect2/hd/points /kinect2/qhd/camera_info /kinect2/qhd/image_color /kinect2/qhd/image_color/compressed /kinect2/qhd/image_color_rect /kinect2/qhd/image_color_rect/compressed /kinect2/qhd/image_depth_rect /kinect2/qhd/image_depth_rect/compressed /kinect2/qhd/image_mono /kinect2/qhd/image_mono/compressed /kinect2/qhd/image_mono_rect /kinect2/qhd/image_mono_rect/compressed /kinect2/qhd/points /kinect2/sd/camera_info /kinect2/sd/image_color_rect /kinect2/sd/image_color_rect/compressed /kinect2/sd/image_depth /kinect2/sd/image_depth/compressed /kinect2/sd/image_depth_rect /kinect2/sd/image_depth_rect/compressed /kinect2/sd/image_ir /kinect2/sd/image_ir/compressed /kinect2/sd/image_ir_rect /kinect2/sd/image_ir_rect/compressed /kinect2/sd/points /rosout /rosout_agg
這裡使用/kinect2/qhd/image_color和/kinect2/qhd/image_depth_rect。
開啟ORB_SLAM2/Example/ROS/ORB_SLAM2/src/ros_rgbd.cc,將對應語句修改為:
message_filters::Subscriber<sensor_msgs::Image> rgb_sub(nh,"/kinect2/qhd/image_color",1); message_filters::Subscriber<sensor_msgs::Image> depth_sub(nh,"/kinect2/qhd/image_depth_rect",1);
2.kinect2的標定(獲取內參和畸變引數)
# Camera calibration and distortion parameters (OpenCV)
Camera.fx: 1050.6
Camera.fy: 1051.3
Camera.cx: 938.0
Camera.cy: 554.4
Camera.k1: 0.0
Camera.k2: 0.0
Camera.p1: 0.0
Camera.p2: 0.0
Camera.width: 1920
Camera.height: 1080
# Camera frames per second
Camera.fps: 30.0
最後執行以下命令即可啟動ORB-SLAM2。
rosrun ORB_SLAM2 RGBD Vocabulary/ORBvoc.txt Examples/RGB-D/kinect2.yaml3.編譯build_ros.sh指令碼檔案
配置ROS_PACKAGE_PATH環境變數
source ~/.zshrc
export ROS_PACKAGE_PATH=${ROS_PACKAGE_PATH}:/home/xuzifeng/ORB_SLAM2/Examples/ROS進入ORB_SLAM2主路徑編譯ros節點:
chmod +x build_ros.sh
./build_ros.sh確保原程式可以編譯,我在編譯的階段遇到如下問題:
/usr/bin/ld: CMakeFiles/RGBD.dir/src/ros_rgbd.cc.o: undefined reference to symbol ‘_ZN5boost6system15system_categoryEv’
- 出錯原因為:libboost_system.so 與libboost_filesystem.so找不到連結目錄
- 解決方案為:
locate boost_system//查詢到目錄
/usr/lib/x86_64-linux-gnu/libboost_system.a
/usr/lib/x86_64-linux-gnu/libboost_system.so
/usr/lib/x86_64-linux-gnu/libboost_system.so.1.58.0locate boost_filesystem//查詢到目錄
/usr/lib/x86_64-linux-gnu/libboost_filesystem.a
/usr/lib/x86_64-linux-gnu/libboost_filesystem.so
/usr/lib/x86_64-linux-gnu/libboost_filesystem.so.1.58.0將libboost_system.so與libboost_filesystem.so複製到ORB_SLAM2/lib下,將ORB_SLAM2/Examples/ROS/ORB_SLAM2下的Cmakelists.txt中加入庫目錄,未修改前為:
set(LIBS
${OpenCV_LIBS}
${EIGEN3_LIBS}
${Pangolin_LIBRARIES}
${PROJECT_SOURCE_DIR}/../../../Thirdparty/DBoW2/lib/libDBoW2.so
${PROJECT_SOURCE_DIR}/../../../Thirdparty/g2o/lib/libg2o.so
${PROJECT_SOURCE_DIR}/../../../lib/libORB_SLAM2.so
)
之後加入 -lboost_system,修改之後的CMakeLists.txt
set(LIBS
${OpenCV_LIBS}
${EIGEN3_LIBS}
${Pangolin_LIBRARIES}
${PROJECT_SOURCE_DIR}/../../../Thirdparty/DBoW2/lib/libDBoW2.so
${PROJECT_SOURCE_DIR}/../../../Thirdparty/g2o/lib/libg2o.so
${PROJECT_SOURCE_DIR}/../../../lib/libORB_SLAM2.so
-lboost_system
)4.重新編譯工程
//重新編譯工程
chmod +x build_ros.sh
./build_ros.sh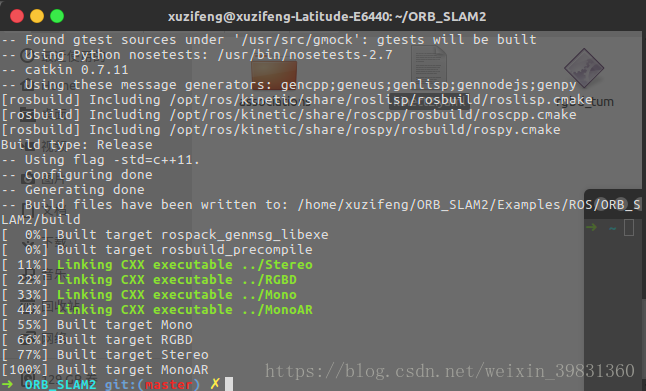
編譯成功!!接下來就是啟動kinect2的驅動和bridge,並且執行Examples/ROS/RBGD
5.執行程式
開啟一個終端,執行:
roscore
//新開一個終端 我這裡已經設定了ROS 的啟動路徑 不需要source devel/setup.sh
roslaunch kinect2_bridge kinect2_bridge.launch
接著cd 到ORB_SLAM2/Examples/ROS/ORB_SLAM2路徑下 新開一個終端輸入:
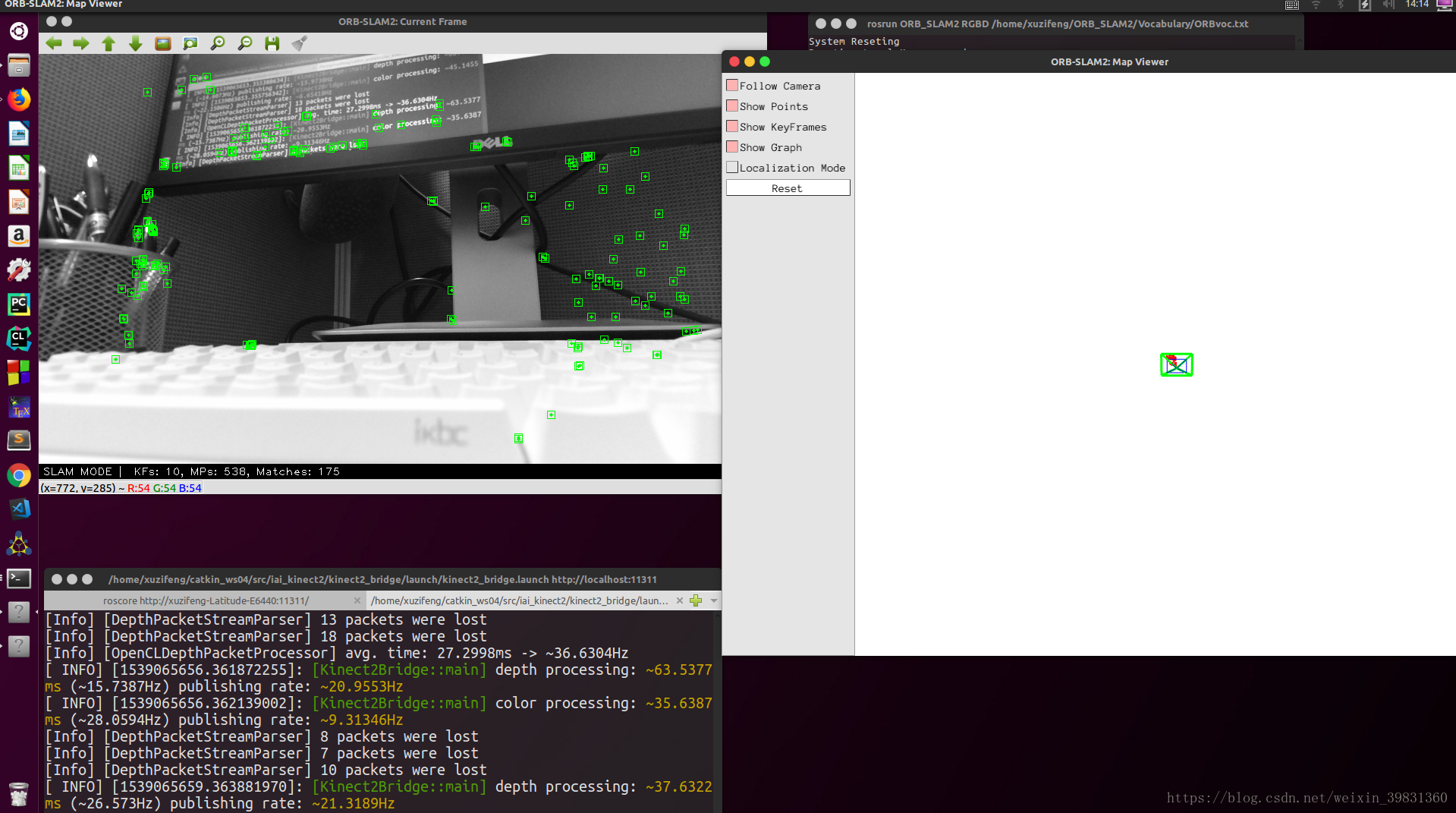
rosrun ORB_SLAM2 RGBD /home/xuzifeng/ORB_SLAM2/Vocabulary/ORBvoc.txt /home/xuzifeng/ORB_SLAM2/Examples/RGB-D/kinect2.yaml
執行成功!!!