rosserial_arduino學習筆記2《Arduino IDE 安裝設定》
1 介紹
Arduino和Arduino IDE是快速輕鬆程式設計硬體的絕佳工具。使用rosserial_arduino包,您可以直接在Arduino IDE中使用ROS。rosserial提供了一個適用於Arduino UART的ROS通訊協議。它允許您的Arduino成為一個完整的ROS節點,可以直接釋出和訂閱ROS訊息,釋出TF轉換,並獲得ROS系統時間。
注意:如果您還沒有安裝Arduino IDE,請從Arduino網站下載。最好將應用程式安裝到應用程式路徑,桌面或主資料夾的資料夾中。安裝後,啟動應用程式以選擇您的sketchbook位置。(參見arduino官方網站,sketchbook是儲存程式或sketches標準位置)。完成後關閉IDE。
我們的ROS繫結實現為Arduino庫。像所有Arduino庫一樣,ros_lib通過將其庫實現放入sketchbook的libraries資料夾中來工作。如果您的sketchbook中還沒有庫資料夾,請建立一個。然後,您可以使用以下說明安裝庫。
為了在你自己的程式碼中使用rosserial庫,你必須先放
#include <ros.h>在包括任何其他標頭檔案之前,例如
#include <std_msgs / String.h>否則Arduino IDE將無法找到它們。
2 安裝軟體
2.1 在ROS工作站上安裝
您有2個如何安裝相關庫的選項。
2.1.1(推薦)在ROS工作站上安裝二進位制檔案
您可以通過執行以下命令為Arduino安裝rosserial:
sudo apt-get install ros-kinetic-rosserial-arduino
sudo apt-get install ros-kinetic-rosserial將kinetic替換為您正在安裝的版本的名稱:例如kinetic。
2.1.2 從Source安裝到ROS工作站
根據您的版本選擇構建系統以檢視適當的說明。
基於catkin版本
自從groovy釋出以來,Rosserial已經被淘汰,工作流程與fuerte和早期版本略有不同。您可以執行一次併為所有已安裝的訊息生成庫,而不是在要使用的每個程式包上執行庫生成器。在下面的說明中,<ws>表示您的catkin工作區。
cd <ws> / src
git clone https://github.com/ros-drivers/rosserial.git
cd <ws>
catkin_make這些命令從github儲存庫克隆rosserial,生成通訊所需的rosserial_msgs,並在<ws> / install目錄中建立ros_lib庫。
注意:目前您必須執行catkin_make 安裝,否則將丟失ros_lib目錄的某些部分。希望很快就能解決這個問題。
2.2 將ros_lib安裝到Arduino環境中
前面的安裝步驟建立了ros_lib,必須將其複製到Arduino構建環境中,以使Arduino程式能夠與ROS互動。
在下面的步驟中,<sketchbook>是Linux Arduino環境儲存sketches的目錄。通常,這是您的主目錄中名為sketchbook的目錄。或者,您可以安裝到Windows Arduino環境中。
對於groovy源(catkin)而言,Ros_lib安裝說明與早期(rosbuild)或二進位制版本不同。確保你已經選擇了上面正確的構建系統來檢視適當的說明 - 如果是groovy源構建則選擇catkin,否則為rosbuild。
注意:您必須刪除libraries / ros_lib才能重新生成,因為它的存在會導致錯誤。
cd <sketchbook> / libraries
rm -rf ros_lib
rosrun rosserial_arduino make_libraries.py。如果要在Windows上構建Arduino,則需要在某個方便的目錄中建立ros_lib資料夾。
cd <some_empty_directory>
rosrun rosserial_arduino make_libraries.py。如果要在Windows上構建Arduino,請將ros_lib目錄從Linux複製到Windows系統的sketchbook / libraries資料夾(通常位於“我的文件”中)。
*注意:目前您可以直接在Arduino IDE中安裝Arduino庫。只需從Sketch - > Include Library - > Manage Library中的IDE選單開啟Library Manager。然後搜尋“rosserial”。如果您需要處理Arduino sketch,但又不想設定完整的ROS工作站,這將非常有用。
3. 整理起來
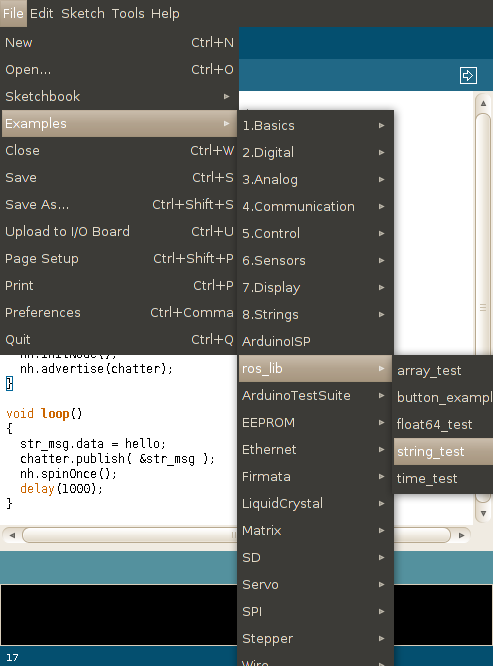
重新啟動IDE後,您應該看到示例中列出的ros_lib: