
Kinect深度圖與攝像頭RGB的標定與配準(轉載文章)


自從有了Kinect,根據深度圖提取前景就非常方便了。因此出現了很多虛擬現實、視訊融合等應用。但是,Kinect自身的RGB攝像頭解析度有限,清晰度也不及一些專業攝像頭,因此有了用第三方攝像頭代替Kinect攝像頭的想法。現在的問題是,如何將Kinect的深度圖與第三方攝像頭的RGB影象對準?
我們知道,當使用Kinect的RGB時,有方便的MapColorCoordinatesToDepth()和MapDepthCoordinatesToColor()方法可以使用,這些函式將深度圖和RGB對準到一起,從而可根據深度圖準確的提取出RGB中的前景。
但打算使用第三方攝像頭時,這些函式都沒有用了,它們不可能知道我們所用攝像頭的引數以及空間位置,因此只能靠自己標定的方法解決這一問題。
在標定之前,先要固定好Kinect和攝像頭的位置,讓深度攝像頭和RGB攝像頭的像平面儘量平行,距離也不要隔得太遠,就像下面這樣(做得很醜,請見諒-_-!!):

一、RGB攝像頭的標定
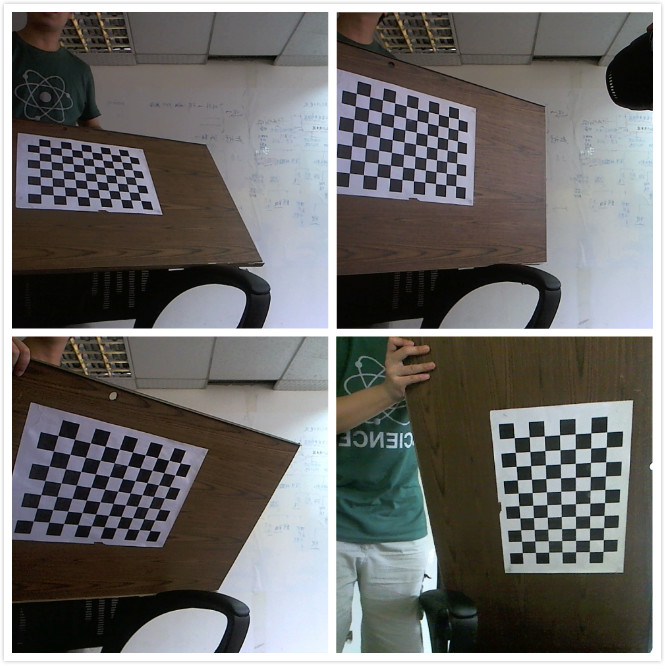
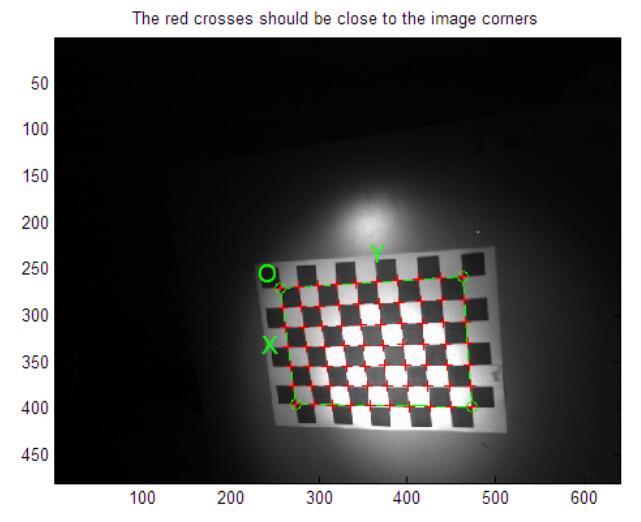
RGB攝像頭的標定想必大家都很熟悉,最常用的就是棋盤法。用待標定的攝像頭拍攝多幅不同視角下的棋盤圖片,將這些圖片扔給OpenCV或Matlab,從而計算出該攝像頭的內參以及對應於每一幅影象的外參。這裡就寫寫我在標定過程中的一些感受和經驗吧。
1、標定所用的棋盤要儘量大,至少要有A3紙的大小;
2、棋盤平面與攝像頭像平面之間的夾角不要太大,控制在45度以下;
3、棋盤的姿勢與位置儘可能多樣化,但相互平行的棋盤對結果沒有貢獻;
4、用於標定的圖片要多於10張;
5、注意設定好攝像頭的解析度,長寬比最好和深度圖的相同,比如1280x960(4:3)。
以下是一些用於標定的樣圖:
二、深度攝像頭的標定
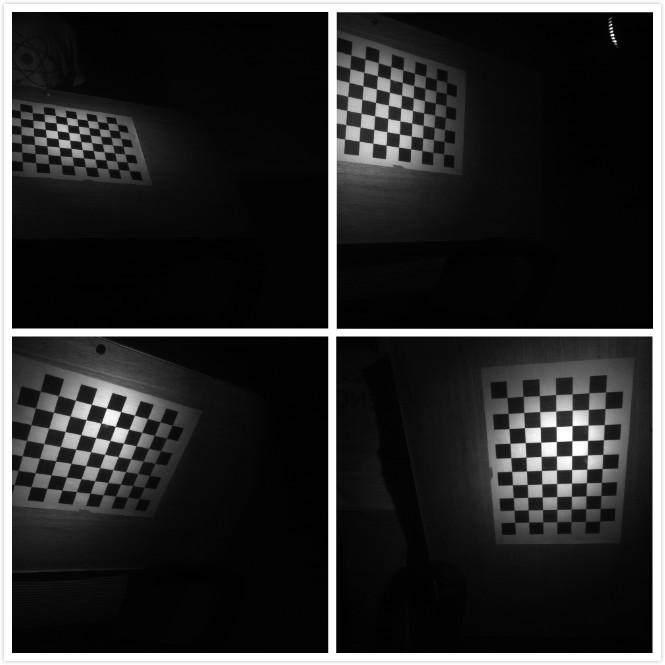
深度攝像頭看起來和RGB攝像頭差別很大,實際上有很多相似之處。就Kinect而言,其通過一個紅外散斑發射器發射紅外光束,光束碰到障礙物後反射回深度攝像頭,然後通過返回散斑之間的幾何關係計算距離。其實,Kinect的深度攝像頭就是一個裝了濾波片的普通攝像頭,只對紅外光成像的攝像頭(可以這麼認為)。因此要對其標定,只需用紅外光源照射物體即可,LED紅外光源在淘寶上就20元一個。還有一點必須注意,在拍攝紅外照片時,要用黑膠帶(或其他東西)將Kinect的紅外發射器完全擋住
三、計算內參
得到以上圖片之後,就可以分別對RGB攝像頭和深度攝像頭計算內參了。可以使用OpenCV,自己寫一小段程式,然後把圖片扔進去。也可以使用著名的Matlab Camera Calibration Toolbox。自己寫程式碼累,Matlab我沒裝,因此我使用 GML Calibration Toolbox,可以在這裡下載 http://graphics.cs.msu.ru/en/node/909 。這是一個C++寫的標定程式,有友好的使用者介面,精度也不錯,使用非常方便。
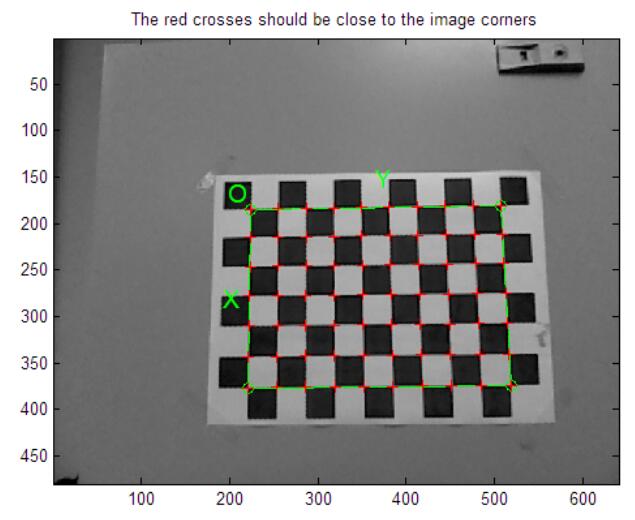
分別將RGB和紅外的照片扔進去,得到RGB攝像頭的內參(包括畸變引數):
=== Intrinsic ===
554.952628 0.000000 327.545377
0.000000 555.959694 248.218614
0.000000 0.000000 1.000000
=== Distortion ===
0.025163 -0.118850 -0.006536 -0.001345
和Kinect深度攝像頭的內參(這個對所有Kinect應該都是差不多的):
=== Intrinsic ===
597.599759 0.000000 322.978715
0.000000 597.651554 239.635289
0.000000 0.000000 1.000000
=== Distortion ===
-0.094718 0.284224 -0.005630 -0.001429
四、配準
現在說說怎麼配準,由於Kinect可以得到真實點的三維座標,因此深度圖的配準可以用一些簡單特殊的方法。
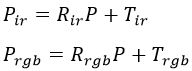
設P_ir為在深度攝像頭座標下某點的空間座標,p_ir為該點在像平面上的投影座標(x、y單位為畫素,z等於深度值,單位為毫米),H_ir為深度攝像頭的內參矩陣,由小孔成像模型可知,他們滿足以下關係:
又設P_rgb為在RGB攝像頭座標下同一點的空間座標,p_rgb為該點在RGB像平面上的投影座標,H_rgb為RGB攝像頭的內參矩陣。由於深度攝像頭的座標和RGB攝像頭的座標不同,他們之間可以用一個旋轉平移變換聯絡起來,即:
其中R為旋轉矩陣,T為平移向量。最後再用H_rgb對P_rgb投影,即可得到該點對應的RGB座標:

需要注意的是,p_ir和p_rgb使用的都是齊次座標,因此在構造p_ir時,應將原始的畫素座標(x,y)乘以深度值,而最終的RGB畫素座標必須將p_rgb除以z分量,即(x/z,y/z),且z分量的值即為該點到RGB攝像頭的距離(單位為毫米)。
現在的問題是,如何求聯絡兩個座標系的旋轉矩陣和平移向量。這就要用到攝像頭的外參了。
外參矩陣實際上也是由一個旋轉矩陣R_ir(R_rgb)和平移向量T_ir(T_rgb)構成的,它表示將一個全域性座標系下的點P變換到攝像頭座標系下,分別對深度攝像頭和RGB攝像頭進行變換,有以下關係:
在第一式中,將P用P_ir、R_ir和T_ir表示,並帶入第二式,可得:

從上式可以看出,這是在將P_ir變換為P_rgb,對比之前的式子:
可得:
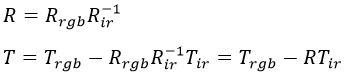
因此,我們只需在同一場景下,得到棋盤相對於深度攝像頭和RGB攝像頭的外參矩陣,即可算出聯絡兩攝像頭座標系的變換矩陣(注意,所有旋轉矩陣都是正交陣,因此可用轉置運算代替求逆運算)。雖然不同場景下得到的外參矩陣都不同,計算得到的R和T也有一些變化,但根據實際實驗結果來看,使用一個正面棋盤的標定影象就可達到較好的效果,如下圖:
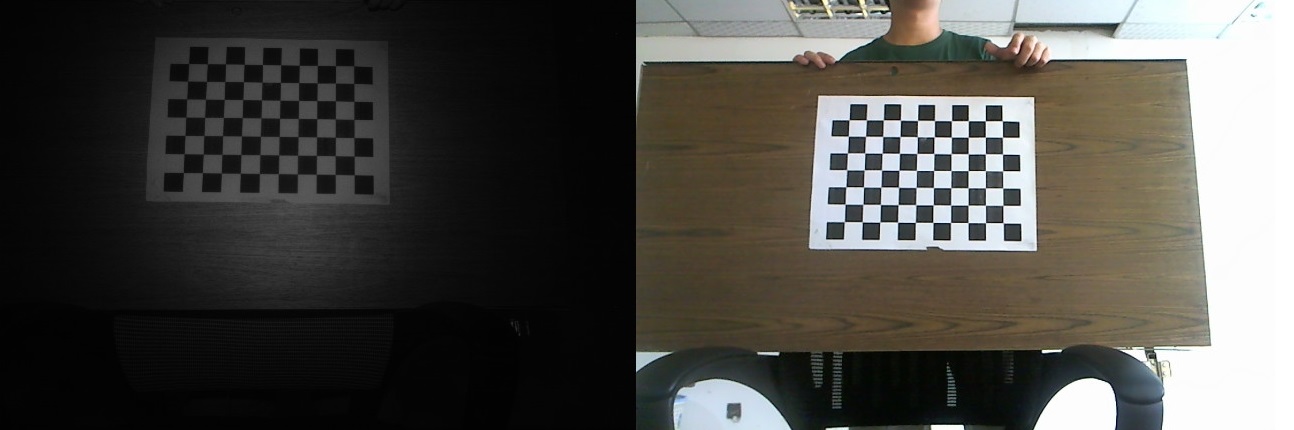
注意,這兩幅影象必須來自於同一場景,否則沒有意義。當然你也可以使用多個場景下的外參,然後使用OpenCV的StereoCalibration函式求得兩個攝像頭的最佳相對變換矩陣,由於時間關係,我沒有做這個測試。
使用GML Calibration Toolbox得到以上兩圖的外參(在選單欄的Calibration->Export Calibration Data選單中選擇匯出),然後根據上式,扔進Mathematica裡面去做矩陣運算,得到最終的R和T:
R={ {0.999853, -0.00340388, 0.0167495},
{0.00300206, 0.999708, 0.0239986},
{-0.0168257, -0.0239459, 0.999571} }
T={ {15.2562}, {70.2212}, {-10.9926} }
五、測試
最後寫一個小程式測試一下,看看配準前(左)和配準後(右)的區別:

從影象上看,配準已經很精確了。若還要更好,可以手動微調一下兩個攝像頭的平移向量T,主要改x分量和y分量,這樣可以控制RGB和深度圖的左右對齊和上下對齊。另外,還可以加入對畸變係數的處理,不過由於Kinect的攝像頭以及我使用的RGB攝像頭本身質量較高,畸變影響不大,這裡就全部忽略了。
說一下這個測試程式的思路。
1、獲取Kinect的深度影象;
2、獲取RGB攝像頭的影象;
3、為深度影象中的每一個畫素附上對應的RGB顏色,比如你要給座標為(x, y)的深度影象素附上顏色,具體步驟如下;
1)構造一個三維向量p_ir = (x, y, z),其中x,y是該點的畫素座標,z是該畫素的深度值;
2)用Kinect內參矩陣H_ir的逆,乘以p_ir得到對應的空間點座標P_ir,具體公式見上文第四部分(配準);
3)由於P_ir是該點在Kinect座標系下的座標,我們需要將其轉換到RGB攝像頭的座標系下,具體的,就是乘以一個旋轉矩陣R,再加上一個平移向量T,得到P_rgb;
4)用RGB攝像頭的內參矩陣H_rgb乘以P_rgb,得到p_rgb,p_rgb也是一個三維向量,其x和y座標即為該點在RGB影象中的畫素座標,取出該畫素的顏色,作為深度影象中對應畫素的顏色;
5)對深度影象中的每一個畫素都做上述操作,得到配準後的深度圖。
國外的標定:
================================分割線=====================================
============================================
2017.09.08
SDK獲取出廠內參數程式碼,MATLAB 標定Kinect v2等
================================分割線====================================SaveSave
彩色圖和深度圖配準的事,我目前是不推薦自己做配準,很繁瑣。如果要自己來做配準,目前我認為的三個配的比較好的(暫且不說Kinect 2的SDK了,需要安裝SDK 2.0 +Visual studio + opencv + PCL,很繁瑣,Kinect C++資料較C#少很多),個人精力有限,原始碼沒有深究。
1. PCL1.8裡有個程式,pcl_openni2_viewer,在Linux下面直接接上相機華碩的Xtion Pro live,輸入上面程式碼可以看到效果;其他的相機我沒試過,這個pcl的github有原始碼,呼叫的openni的東西
2. Kinect V2相機在Linux下的驅動freenect2,原始碼編譯之後,bin資料夾有個Protonect的程式,效果也很好,github官網也可以看到原始碼https://github.com/OpenKinect/libfreenect2
3. Processing 3程式有個Kinect 外掛kinect4WinSDK(Kinect 1代和2代都有對應外掛),下圖是Kinect1代的


