
視覺無人機高速公路違章檢測的研究——階段思考與計劃2018.12.18-12.25
之前寫的 https://blog.csdn.net/u010712012/article/details/84728708
分析違章檢測的流程,其中流程圖如下:
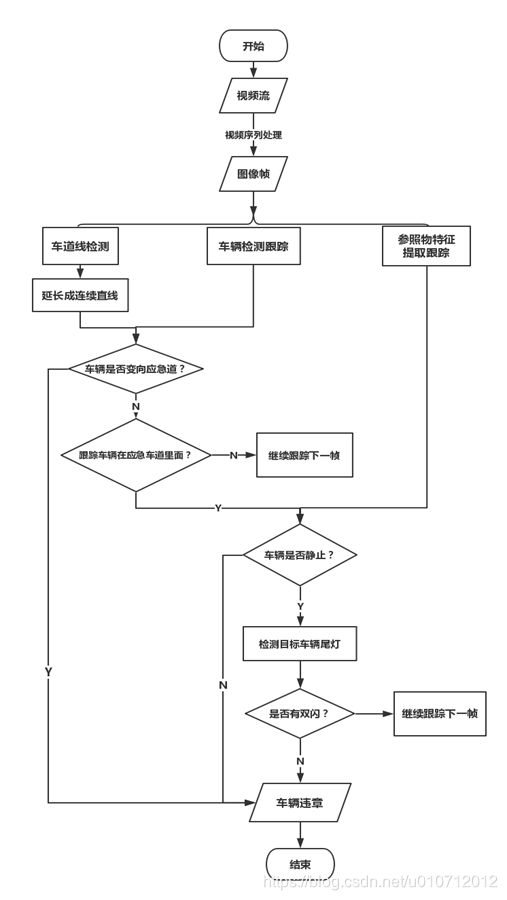
這個流程當中的違章變道是最近在研究的內容,這裡頭有幾個關鍵點:
1.車道線
2.車輛
3.變道判決
車道線的檢測我嘗試了經典的Hough變換 https://blog.csdn.net/u010712012/article/details/84780943
以及LSD演算法:
https://blog.csdn.net/u010712012/article/details/85038614
這兩種演算法的區別是Hough變換直線檢測的準確度沒有LSD來的快。
但是在我們這個違章變道的場景下,單獨在一張圖片當中檢測出車道線,不管是實線還是虛線,都檢測出來,而其他的物體,都希望把它們過濾掉(如果車輛壓在車線上),那麼倘若車輛被濾掉了(黑色的車輛很可能就被濾掉了),那麼車道線一定是斷續的。那麼我們如何判斷車輛違章變道?
一個思路是這樣的,在一幀圖片當中車輛是壓著線的,這個時候這張圖片我們來進行多種處理:
1.車道線單獨檢測出來,其他部分濾除,也就是ROI感興趣區域就只有那些車道線。
2.在那張車輛壓線的圖片中單獨檢測車輛,是否有車輛,以及車輛的位置。
後續判斷車輛是否壓線,則對這兩張檢測出來的圖片進行比對,若前幾幀的車道線與這一幀壓線的圖片匹配不了,而這一幀檢測出來又有車輛,則判斷車輛是壓在了線上。即車道實線在車輛不壓線的情況下都是可以匹配的,但是壓線的時候那一塊車道線斷續了,而又能檢測出來那一塊是車輛,則判斷壓線。
而違章變道則是在已知壓線的基礎上,獲取前幾幀與後幾幀的圖片,對車輛的特徵進行跟蹤,看是否是同一輛車,利用數學模型判斷車輛與車道線的位置,就可以判斷車輛是否違章變道。
這裡面的工作就需要並行完成:
1.車道線怎麼單獨給檢測出來,能不能通過閾值處理/ROI選取,把其他非車道線的部分給濾除。因為高速公路車道線基本都是白線,所以用閾值可能管用,或者彩色空間也可以試試。看看專門檢測車道線的論文,只剩下背景和車道線的,相當於車道線分割提取出來的論文,是這周到的重點。12.19-12.25
2.車輛檢測,這個用YOLO可以把車輛分類出來還能有一個bbx,怎麼在一張圖片中單獨檢測出有車,這個恰好是目前深度學習的優勢,或者有HOG_SVM檢測車輛,這個就是需要得到車輛的特徵,機器學習演算法無非就是我們人為給是車輛的標上正,不是的標負的標籤,然後用大量資料去訓練,最後計算機才知道一張圖片當中是不是車。這個也努力弄出來12.19-12.25
檢測出圖片中有車,車的位置,試著把其他地方也給濾掉,這樣兩張處理好的圖片,一張全是車道線,一張就只有檢測到的車輛,那麼後面就通過數學模型,講道理最後都是迴歸數學,這就是演算法的天花板吧!