
ADAS/AD控制器模組開發01
一、行業背景介紹:
汽車行業的金字塔供應鏈體系:
汽車行業作為百年產業,有複雜的供應鏈體系。位於金字塔頂端的,是OEM(主機廠/整車廠),負責開發、製造、銷售汽車;往下是汽車零部件的一級供應商(Tier1)、二級供應商(Tier2)、...等等。
其中OEM即為廣為人知的各種整車廠,例如上汽大眾、上汽通用、一汽大眾、廣汽豐田、長安福特、吉利、長城、上汽乘用車、廣汽乘用車等等汽車廠;
Tier1即為各種手握真正汽車核心技術的一級零部件供應商,例如博世、採埃孚/天合、大陸、麥格納、德爾福、電裝、愛信、博格華納、法雷奧、舍弗勒、奧托立夫、偉世通、聯合電子等等;
Tier2即為各種給Tier1供應商供貨的供應商,以汽車電子零部件中的半導體晶片產業為例,主要是德州儀器(TI)、瑞薩電子(Renesas)、恩智浦(NXP)、英飛凌(Infineon)等等晶片廠家。
汽車的新能源化和智慧化:
汽車目前有兩個大體的發展方向,一個是新能源化(混合動力、插電混動、電動、燃料電池等),一個是智慧化(智慧駕駛和智慧網聯)。
對於新能源化,對於天朝來講,是必須要搞的。保護環境的因素有,但是效果也不一定明顯,更多是宣傳口的概念,真正主要還是降低國民經濟和民生領域對於石油的依賴。另外,傳統內燃機壁壘太高,核心技術都在國外,天朝也想找個由頭和方向,創造一些彎道超車的機會。個人認為新能源化的終極目標應該是燃料電池。但是由於目前中國的燃料電池技術太弱,整個世界範圍內燃料電池技術最發達的國家又是日本。這就有個問題,如果發展燃料電池,那就相當於天朝撒錢給腳盆雞(Japanese, 日本英文發音諧音,下同),幫助扶植腳盆雞發展燃料電池產業鏈。這種事情當然不能幹,只能邊走邊看,啥時候國內相關技術達到一定臨界值,才會重拾這條線路。搞混合動力吧?是挺省油,但是還是腳盆雞的技術最強,例如豐田普銳斯及其他一眾混動版的豐田車(卡羅拉混動、雷凌混動、凱美瑞混動...),況且還是要燒油啊,不符合國家能源戰略。搞插電混動?只能前期電動車發展推進不下去時,啟用市場使用;因為插電混動的存在,買車的人少些疑慮和擔憂,造充電樁的人因為有需求可以多造些充電樁,幫助電動車相關基礎設施的鋪開。最後找來找去,只能先發展電動車了,畢竟美國(鷹醬)還有個特斯拉作為排頭兵,也活了這麼多年了,能夠幫助天朝人摸著鷹醬過河。況且這個技術路線的技術門檻相對來說最低,君不見一水的新造車勢力,全都採用電動車是為嘛嗎?
對於智慧化,目前包括兩個子方向,一個是智慧駕駛方向,另一個是智慧網聯方向。智慧駕駛方向又分為ADAS和AD(下文會詳細解釋)。而對於智慧網聯方向,終極目標應該是智慧駕駛倉的實現,即整個乘坐艙的智慧網聯化、多媒體化,各種炫酷的HMI顯示、各種AR技術、各種螢幕、各種網聯設施、各種人性化科技化的設計、各種像蔚來汽車NOMI那樣的人工智慧機器人(雖然目前功能挫的一逼)...需要說明一點,這兩個方向並不是最近才出現的,事實上,在傳統汽車電子領域,一直就存在兩大類汽車電子,一種是電子控制類,一種資訊娛樂類。只不過智慧駕駛方向是電子控制類產品的進一步發展,智慧網聯方向是資訊娛樂類的進一步發展。
汽車電子產品開發工具鏈簡介:
TBD
二、概念&名詞解釋:
談ADAS/AD之前,首先要將與之相關的各種常見ADAS/AD功能點(features)的縮寫和含義貼出來,如下所示:
a. 各種智慧駕駛功能點的縮寫及全稱:
-
CC: Cruise Control 定速巡航;
-
ACC: Adaptive Cruise Control 自適應巡航;
-
FSRA(或 ACC Stop&Go): Full Speed Range ACC 全速域自適應巡航;
-
FCW: Front Collision Warning 前向碰撞預警;
-
AEB: Automatic Emergency Brake 自動緊急制動;
-
AEB-V: Automatic Emergency Brake - Vehicle AEB-車輛;
-
AEB-P: Automatic Emergency Brake - Pedestrian AEB-行人;
-
AEB-C: Automatic Emergency Brake - Cycling AEB-騎自行車;
-
LDW: Lane Departure Warning 車道偏離預警;
-
LKA: Lane Keeping Assit 車道保持輔助;
-
LKA-LDP: LKA - Lane Departure Prevention LKA之車道偏離修正;
-
LKA-LC: LKA - Lane Centering LKA之車道居中;
-
ELK: Emergent Lane Keeping 緊急車道保持;
-
TSR: Traffic Sign Recognition 交通標誌識別;
-
ISA: Intelligent Speed Adaptation 智慧車速控制;
-
IHBC: Intelligent High Beam Control 智慧遠光燈控制;
-
DMS: Driving Monitor System 駕駛員監控系統;
-
TJA: Traffic Jam Assit 交通擁堵輔助;
-
HWA: Highway Assit 高速公路輔助;
-
APA: Auto Parking Assist 自動泊車輔助;
-
RPA: Remote Parking Assist 遠端泊車輔助;
-
TJP: Traffic Jam Pilot 交通擁堵領航(科技公司常稱低速自動駕駛功能);
-
HWP: Highway Pilot 高速公路領航(科技公司常稱高速自動駕駛功能);
-
FCTA: Front Crossing Traffic Alert 前向十字交通預警;
-
RCTA: Rear Crossing Traffic Alert 後向十字交通預警;
-
BSD: Blind Spot Detection 盲點探測;
-
LCA: Lane Change Assit 換道輔助;
-
DOW: Doors Opening Warning 開門報警;
-
RCW: Rear Collision Warning 後方碰撞預警;
從以上各個feature可以看出明顯的小步迭代痕跡,總是從檢測-報警-控制的技術路徑進行演化。例如TSR(交通標誌識別)與ISA(智慧車速控制)的關係,先識別出交通訊號並展示在HMI上,之後才是對一些交通訊號的應用,如車速限制標誌的應用(ISA智慧車速控制)。同樣的成對關係還有FCW/AEB、LDW/LKA等。
還有一種演化趨勢,可以表徵車輛責任控制權的轉移,例如TJA到TJP,HWA到HWP等。
這種掰碎了的各個功能點有個好處,既方便了OEM進行產品配置選擇,進行高低端產品搭配;也方便了Tier1供應商報價收錢。
b. ADAS/AD:
又稱Advanced Driver Assistant Systems / Autonomous Driving 高階駕駛輔助系統/自動駕駛;其中,ADAS專注於L1/L2/L3級智慧駕駛,AD專注於L4/L5級別智慧駕駛。L0級代表無智慧駕駛功能;L1代表只有報警提醒但不具備車輛干預能力的ADAS功能,例如FCW/LDW/TSR/FCTA/RCTA/BSD/LCA/DOW/RCW等報警提醒功能;L2代表具備單縱向或者單橫向車輛干預能力的ADAS功能,例如ACC/FSRA/AEB/LKA/ELK/ISA/IHBC等車輛干預輔助功能,注意這些功能英文中多含有Assit的字眼,代表輔助、助理的意思,也就暗示了駕駛員是車輛的主要負責方,ADAS系統只是輔助方,不承擔主要駕駛責任;L3代表具備縱向+橫向控制的完整ADAS功能,例如TJA/HWA/APA/RPA等車輛干預輔助功能,但是仍舊強調Assit(輔助),不承擔主要駕駛責任,;L4代表具備縱向+橫向控制的完整駕駛領航功能,例如TJP/HWP等車輛領航功能,注意這些功能英文中含有Pilot的字眼,代表領航的意思,也就暗示了在這些功能在限定區域內開啟時,例如HWP指定只能在高速公路場景下開啟,那麼在該區域開啟AD系統(注意不再以ADAS系統表徵,而換成了AD系統)時,AD系統是車輛的主要負責方,駕駛員只有在需要介入時才承擔責任;L5代表無限定區域的完全智慧駕駛,也是完整意義上的真自動駕駛。
(comment by 小阿狸 @ 2018.11.14: 隨著《汽車駕駛自動化分級》國標徵求意見稿的推出,分法已經變化:L0代表無駕駛自動化;L1代表駕駛輔助,內涵是隻有縱向控制或橫向控制,如ACC、AEB、LKA,駕駛員不能脫手脫眼(手扶方向盤、眼睛監控車輛前方視野);L2代表部分駕駛自動化,內涵是同時具有縱向和橫向控制功能,如TJA、HWA,駕駛員不能脫手脫眼;L3代表有條件駕駛自動化,內涵是同時具有縱向和橫向控制功能,如TJP、HWP,駕駛員可脫手脫眼打遊戲親嘴車震,但是一旦車輛搞不定一些情況,駕駛員必須立即接手控制權...L4代表高度駕駛自動化,內涵是同時具有縱向橫向控制功能,駕駛員可脫手脫眼打遊戲親嘴車震,車輛報警讓駕駛員控制車輛時,駕駛員想控制就控制,想繼續打遊戲頁可以不理會車輛的報警提醒;L5代表完全自動駕駛,取消油門剎車方向盤,把車改裝成房車,在車裡隨便震吧...)
c. 高階駕駛輔助/自動駕駛/智慧駕駛的名詞區別:
根據上述內容可知,汽車在無人駕駛方向上存在兩種技術路線。
一種是以傳統Tier1供應商採用的ADAS路線,即高階駕駛輔助路線,主要是以小步迭代的方式,逐步發展為完全自動駕駛。該技術路線劍指主流乘用車和商務車的量產車市場,隸屬於汽車電子領域,主要依託傳統的汽車電子開發流程和工具,即在硬體上,開發各種滿足車規的電子控制單元模組(ECU)及外圍感測器。軟體上,依託於各個晶片供應商提供的嵌入式開發環境,例如德州儀器(TI)、瑞薩電子、英飛凌等,開發車規級嵌入式軟體。演算法上,一般會分成底層檢測演算法和上層應用演算法,底層檢測演算法一般都是些感測器環境檢測演算法,例如Mobileye的EyeQ系列晶片實現的各種視覺檢測演算法集(車道線檢測演算法、車輛和行人等目標檢測跟蹤演算法、紅綠燈檢測演算法、交通標誌識別演算法、可行駛區域檢測演算法等等),底層檢測演算法多采用C/C++進行開發;上層應用演算法實際是指各種如ACC/AEB/LKA/TJA等功能點(features),也有將上層應用演算法叫做車輛控制演算法的,功能點與主機廠的功能需求定義緊緊相關,且依託MATLAB/Simulink等視覺化開發工具,以MBD(Model Based Design,基於模型的設計)開發流程,開發、管理各種ADAS功能點。ADAS的產品開發相對於AD開發的特點是,開發過程被解耦成很多具體學科模組,存在複雜的開發角色,例如系統工程師(系統需求、系統架構、系統測試)、電子工程師(或者叫做硬體工程師)、嵌入式軟體工程師、演算法工程師(主要指車道線檢測等感知演算法)、feature工程師(基於MATLAB/Simulink開發各種功能點)、機械工程師(負責零部件產品的外殼、標籤等)、製造工程師(產線製造相關)、測試&驗證工程師、匹配工程師等,這些複雜角色按照V-Model(V模型)開發流程,即需求分析、需求開發、系統架構、系統設計、各個學科子模組架構(軟體、硬體、機械、匹配、製造、驗證、演算法、feature等子模組)、子模組設計、子模組實現,子模組測試、子模組整合、子模組整合測試、系統整合、系統整合測試、系統測試(也叫需求測試、功能測試、整車測試)的層級順序,進行汽車電子產品的開發。ADAS路線目前是正在賺錢的路線,因此玩家主要以各種成熟的、巨型的Tier1公司為主力,如博世、大陸、德爾福、奧托立夫、採埃孚/天合、電裝等,它們佔領了主要市場,賺取鉅額利潤;國內公司曾經只能搞一搞360環視、自動泊車等技術門檻不高的ADAS系統,不過目前正在向L1和L2級別的前向功能和產品發力,也取得了不小進展。常見玩家有恆潤科技、華域汽車、聯創、延鋒偉世通等,還包括眾多智慧駕駛初創公司等。因為硬體核心技術(如毫米波雷達硬體、攝像頭CMOS影象感測器、鏡頭、各種MCU、ARM、DSP晶片等)仍舊在巨型Tier1/Tier2手中,所以大型跨國Tier1仍舊處於穩穩的壟斷地位。該路線常見的汽車零部件產品主要有智慧前視攝像頭模組(FCM, Forward Camera Module)、前向毫米波雷達模組(FRM, Forward Radar Module)、ADAS/AD域控制器(ADC, ADAS/AD Domain Controller)、側後方毫米波雷達模組(SRR, Side-Rear Radar)、360環視控制器+環視攝像頭(BEV, Bird's-Eye View)等等。值得一提的是,這些產品不是簡單的單一感測器,而是集成了感測器的ECU(電子控制單元)模組,是一個完整的子系統。一般的汽車電子領域,如果產品用詞強調module(模組),而不是強調Sensor(感測器)的話,一般都是指具備各種計算單元和功能的ECU。
另一種是以各種高新科技公司(曾經的高科技公司,應該是泛指計算機技術、生物技術、航空航天技術等領域的高科技,現在的所謂高科技公司應該已經特指各種IT/網際網路/軟體公司了吧?尤其是在中國),例如谷歌、百度、阿里菜鳥等,採用的AD路線,即自動駕駛路線,主要是以ROS機器人系統為基礎、以高精地圖技術、人工智慧技術、計算機視覺技術的大量應用為特徵的L4級別自動駕駛。目前該技術路線主要以Demo為主,也就是基於PC電腦(工控機)的軟體來優化打磨自家的軟體和演算法,並未進行嵌入式化、工業化。該技術路線目前非常偏軟體行業,完全不採用傳統汽車行業的開發流程和工具鏈,直接利用自身強大的程式碼實現能力,以高精地圖、全域性路徑規劃、環境感知、定位(RTK、VSLAM)、障礙物預測、區域性路徑規劃、車輛控制等模組,實現各種車輛功能。從業人員多為程式設計師等軟體開發人員,沒有複雜的開發人員角色分工。由於L4技術尚未完全成熟,因此高科技公司暫時無法與各種大型Tier1供應商抗衡,目前除了參與乘用車、商用車市場的Demo專案外,也在積極將這種機器人技術用於無人物流車等封閉園區的場景和產品中。嚴格意義上講,目前國內科技公司落地的一些無人駕駛物流車等產品,不是大規模量產的真正汽車自動駕駛技術,而是屬於消費類的運輸機器人,因為這些產品不符合嚴格的車規,無法落地量產。另外,由於目前大型Tier1財大氣粗,擔憂在L4技術路徑上被新入局者顛覆,也在積極佈局自動駕駛技術路線,採用兩頭下注的方式,一邊佔領ADAS領域並壟斷市場,一邊開展AD領域與科技公司積極備戰,例如傳統Tier1巨頭博世,在2017年就開始在蘇州大量招聘各種L4級別的開發人員,如路徑規劃工程師、高精地圖工程師、感測器融合工程師等,備戰AD路線。而科技公司則由於缺乏深厚的車輛製造經驗而放棄ADAS領域,企圖在AD領域超越傳統Tier1。
綜上,為了整合這兩種技術路線,命名上方便包含這兩種技術路徑,最近開始流行“智慧駕駛”這個詞語,來籠統指代高階駕駛輔助(ADAS)和自動駕駛(AD)。尤其是在各種新造車勢力中,內部一般不區分ADAS和AD路線,相關從業人習慣以智慧駕駛工程師來稱呼。
d. ADAS模組系統工程師、ADAS系統工程師、AD模組系統工程師與AD系統工程師的區別:
最近收到不少獵頭的電話,介紹ADAS/AD的系統經理或自動駕駛系統工程師崗位。由於有那麼多系統工程師的種類,很多獵頭無法準確區分出它們之間的區別,以下做簡單澄清。
-
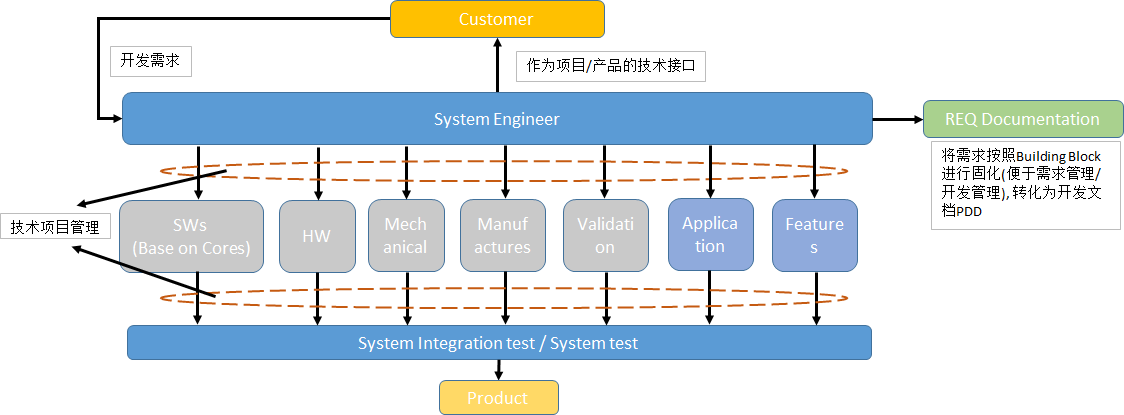
ADAS模組系統工程師,出身於傳統汽車電子行業的Tier1供應商中。這種系統開發人員主要負責如智慧前視攝像頭模組、前向毫米波雷達模組等汽車零部件產品的需求工程(Requirement Engineering,包括需求分析、需求開發、需求測試、需求管理等需求層面的任務)、產品功能安全(Functional Safety)、產品系統架構開發(System Architecture Design and Test)、產品系統開發(System Design and Test)、產品匹配(Application)、系統驗證(System Validation)等工作。控制器系統工程師由於對產品(子系統)負責,因此涉及到的系統範疇較大,強調產品級別的系統,下轄軟體、演算法、硬體(電子)、機械、製造、匹配、驗證等跨學科子模組。主要工作內容包括:對公司外部,作為專案的技術介面人,對接OEM的FOP(Father of part,即零部件負責人,屬於德系OEM叫法;也可叫做DRE,即Design Release Engineer,設計釋放工程師,屬於美系OEM叫法;實質是OEM負責對應供應商產品的產品工程師);對內,分析來自OEM產品工程師的需求,進行系統架構開發、系統設計開發、系統整合測試、系統測試等系統層面相關工作,並按照Building Blocks(德爾福公司的稱謂,其實就是將產品在系統層面上進行分解,分解為各種小系統塊兒,便於開發。以智慧前視攝像頭模組為例,一般Building Blocks大致有30-40多個)編寫產品開發文件,將系統需求梳理並固化(文件化),便於開發過程中進行跟蹤和管理。另外,由於系統是一個抽象的層面,其設計的落地都要傳導至各個具備實物產出的子模組上,(這裡所謂的實物產出,是指類似於軟體的輸出是程式碼、硬體的輸出是電路板、機械的輸出是外殼等物理屬性的輸出物),換句話說,系統的輸出物除了產品開發文件,就是產品本身了。因此為了順利的開發產品,系統工程師天然的作為公司內部的技術專案介面人(Lead System Engineer甚至相當於技術專案經理),主導並推動軟體、演算法、硬體等子模組的開發,解決各種專案上或技術上的問題。例如,一旦軟體開發人員遇到一些非軟體的問題,需要跟其他模組(例如硬體)進行互動時,就需要通知系統工程師,讓系統工程師作為技術管道,協同其他模組達成Alignment。除此之外,系統工程師也可以直接負責某些具體模組的開發工作,例如直接負責某個feature(ACC、LKA等)的模型開發、測試和標定工作。如下圖所示:
-
ADAS系統工程師,存在於主機廠,這裡的系統指整車級別的ADAS系統,貌似很多公司的網路架構人員充當了這個角色),ADAS系統工程師在意的是ADAS相關元件在整車架構上的互動(資訊互動、能量互動、材料互動、物理互動)和ACC/AEB/LKA等feature的功能邏輯。例如,在資訊互動方面,ADAS系統工程師在意ADAS控制器與其他控制執行器的ECU的互動(例如EPS/ECM/ESP/VCU/BCM),用什麼樣的通訊方式(CAN?CANFD?乙太網?);在物理互動上,在意系統元件的安裝位置、安裝支架設計、防塵防水等級等;在能量互動上,在意元件的供電方式;在材料互動上,在意元件之間的材料(如高壓制動液在油管和主缸之間)的流量、流動方向方式等等。
-
AD模組系統工程師,其實應該就是特指域控制器系統工程師了。與ADAS模組類似,也可分出很多控制器級別的Building Blocks,只不過它算是一箇中央控制器,純粹的計算單元,沒有整合感測器,因此需要雷達、攝像頭、鐳射雷達、高精地圖、超聲波雷達等這些外圍感測器給感知訊號。
-
AD系統工程師,目前大部分自動駕駛初創公司的系統工程師,如谷歌waymo、百度apollo等,應該都屬於AD系統工程師,是整車級別的系統工程師,雖然他們都只是Tier1,不造車。AD系統工程師感覺更像(軟體)架構師,尤其是在科技公司裡的自動駕駛系統工程師。可能是因為IT/網際網路科技公司屬於軟體行業,習慣於用產品經理、架構師、開發工程師(演算法、網路、前端、後端、大資料...)等角色劃分。
e. SOR/SOW/SSTS/CTS與功能/產品:
SOR, 全稱State of Requirement,需求狀態。SOW, 全稱State of Work, 工作狀態。經常作為RFQ(Request For Quotation)的一部分,由技術部門編寫,經各部門會籤後,由採購部門進行招標定點。其中,SOR強調對產品/硬體/實體的需求,SOW強調軟體/演算法/服務的需求。
SSTS, 全稱Sub System Technical Specification,子系統技術規範,實際是對功能點(feature)的定義。一個務虛的概念。
CTS, 全稱Component Technical Specification,零部件技術規範,實際是對智慧前視攝像頭模組、毫米波雷達模組、域控制器模組等具體產品(零部件)的定義。一個務實的概念。
SSTS與CTS的關係:簡單講,SSTS強調功能(子系統),CTS強調產品(零部件);功能本身是虛的,它需要一個或幾個承載它的實體(產品),換句話說,產品是對功能(或者部分功能)的實現(PS:好像類與物件的關係啊...)。例如,一些複雜的SSTS(ACC/TJA等)功能,一旦要實現這些功能,需要多個CTS(攝像頭模組、雷達模組、超聲波感測器)參與實現。也有些功能很簡單,很小,例如BSD/LCA/DOW等,一個產品(零部件)-側後雷達模組就可以承載幾個功能。
事實上,無論是在主機廠,還是供應商,都是對功能和產品分層定義的。SSTS對應功能層面,CTS對應產品層面。只不過供應商是負責實現產品的,更願意站在產品的角度看問題,主機廠是負責提供需求的,更願意站在功能角度看問題。
上文中有提到,底層演算法(檢測演算法)與應用層演算法(功能/功能點/feature)會區分開來對待,其實很大一部分原因,也是在於汽車行業對產品與功能進行分層處理導致的。由於OEM強調功能,在與供應商合作過程中,無形之中就把應用層演算法(功能/功能點/feature)提高一個等級來強調。
事實上,國外的很多主機廠,早已開始自己使用MATLAB/Simulink來開發應用層演算法(就是功能/功能點/feature),例如奧迪、福特、通用等。這是因為功能與客戶體驗、車輛performance等產品競爭力息息相關,主機廠願意自己把控;開發完成後的模型,會釋放給供應商,供應商負責將產品(零部件)的其他各個Building Blocks打造好後,並將主機廠提供的模型生成autocode(自動程式碼),整合到產品的軟體中,最後將具備完整功能的產品供貨給主機廠。
三、寫ADAS/AD開發系列文章的動機
在知乎上看了不少關於智慧駕駛的文章,但是多是一些IT行業從業人員寫的關於L4智慧駕駛Demo的開發,更多的是在介紹一些核心演算法的開發,例如人工智慧、深度學習、感知、定位、規劃等。但是不管怎麼發展,智慧駕駛總要從Demo走向量產;總要從工控機變成嵌入式ECU;總要從只實現核心演算法到滿足功能安全要求。因此我想從汽車電子產品的角度,按照V模型的開發流程,分享面向量產的智慧駕駛產品(智慧前視攝像頭模組、智慧駕駛域控制器等零部件級別)的開發細節。
四、展望
一方面,就目前來看,智慧駕駛還是汽車行業的傳統勢力佔優勢,如通用、大眾、豐田、博世、大陸、德爾福等一眾傳統OEM和Tier1。畢竟整個車輛的研發、生產體系是它們建立的,而且技術積累也非常深,工程能力非常強。這裡的工程能力可不光指軟體工程,是整個汽車工業的工程能力,如製造能力、機械工程能力、電子電器工程能力、軟體工程能力、安全工程能力、成本控制能力,質量控制能力、系統整合能力等等等等。
另一方面,也有汽車行業的顛覆者存在,如特斯拉。特斯拉作為典型的科技行業代表,經常與谷歌、蘋果、亞馬遜等科技巨頭相提並論。它的造車就有很多創新之舉,且作為中國各種造車新勢力的偶像,被不斷提及。但即便是這樣,特斯拉到現在還在產能問題上出現各種各樣的問題,這就是製造能力的瓶頸啊!但是不管怎麼樣,還是期待科技公司利用電動車的機遇,繞過傳統內燃機無法逾越的技術壁壘,擠入賽道,並彎道超車,利用科技改變汽車行業,利用程式碼和軟體重寫百年汽車。希望谷歌、蘋果、亞馬遜、BAT等公司,能夠成功的從第三產業(科技服務業)的IT行業向第二產業(工業)過渡,重塑整個汽車的架構,例如,可以騎車的軟硬體徹底分離,將車身、底盤、電池、動力電機、轉向、剎車等機械、液壓件徹底機電一體化(Mechatronics)、線控化(X-by-wire)、模組化;將各種ECU電子控制器和資訊娛樂ECU集中化簡,形成幾個甚至一箇中央控制器(大型工控機???),用以控制機械件等執行器,形成電子件集中化;優化通訊架構和系統架構,減少車身線束;軟體集中部署在中央控制器中,與機械件和電子件解耦,像一個普通桌上型電腦一樣,便於迭代開發新功能。
2018年10月31日更新:by 小阿狸
汽車電子領域中的"車規級"描述
什麼叫車規級?簡單說,就是汽車電子的硬體(不包含軟體哦)要滿足AEC-Q100,AEC-Q101和AEC-Q200的標準規範。這裡的AEC是指automotive electronics council,汽車電子委員會。