
ROS更新ros源
阿新 • • 發佈:2019-01-01
ROS入門教程-更新ROS源
說明
- 鑑於國外的源不穩定或需要翻牆,很不方便,所以國內也搭建不錯的源,這節演示如何愉快地使用國內的源
步驟
方法一:
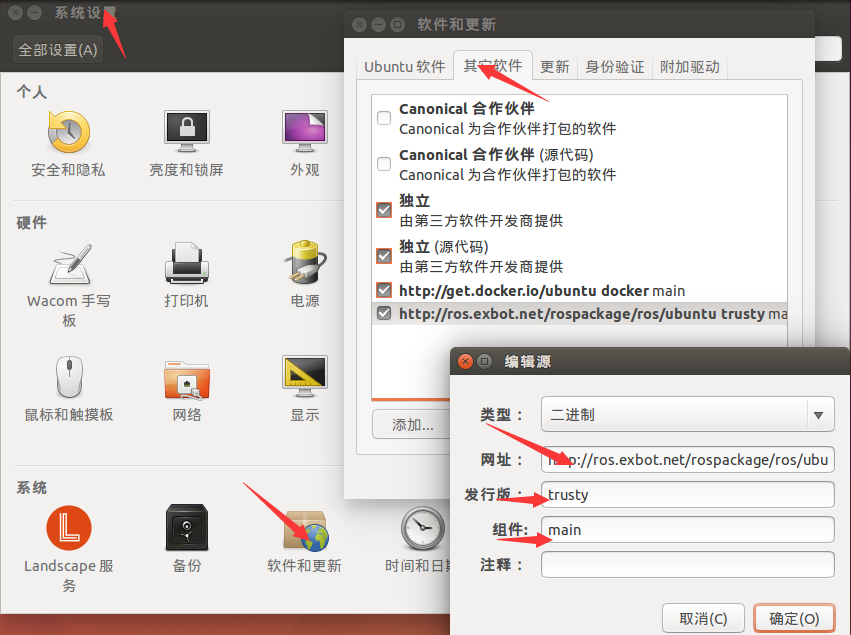
- 開啟系統設定->點選“軟體和升級”->點選“其他軟體”->點選左下角“新增”按鈕
- 網址欄寫入:
http://ros.exbot.net/rospackage/ros/ubuntu/
- 發行版寫入:
trusty
- 元件寫入:
main
- 效果圖:
方法二:
- 命令下執行
sudo sh -c '. /etc/lsb-release && echo "deb http://ros.exbot.net/rospackage/ros/ubuntu/ $DISTRIB_CODENAME main" > /etc/apt/sources.list.d/ros-latest.list'
- 最終會在/etc/apt/sources.list.d/ros-latest.list有這麼一行
deb http://ros.exbot.net/rospackage/ros/ubuntu/ trusty main
完成更新
- 命令列下執行更新
#更新源的軟體包索引
sudo apt-get update
#升級已安裝的軟體包,此可忽略
sudo apt-get upgrade