
Nav導航網格尋路
在查詢NavMesh資料的時候看到這篇blog寫的不錯,從原理到實現,很詳細。另外也可以參考:基於導航網格的A星尋路,這篇blog的參考文獻有詳細介紹導航網格。以下內容轉自http://blianchen.blog.163.com/ by 竹石
NAV導航網格尋路(1) --
介紹
WayPoint尋路
下圖是一個典型的路點尋路
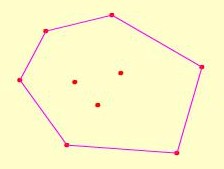
另一種方法是使用多邊形來記錄路徑資訊,它可以提供更多的資訊給ai角色使用。下圖就是一個navigation mesh。

以下列出幾個WayPoint的不足之處:
- 一些複雜的遊戲地圖需要的WayPoint數量過於龐大
- 有時會使角色走“Z”型路徑
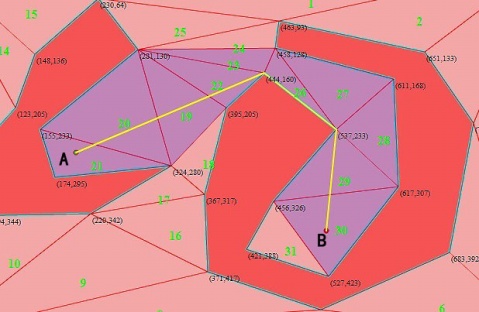
如下圖A點和B點之間的路徑

NAV尋路如下圖

下圖是路點尋路,如黃線,會產生“Z”字形

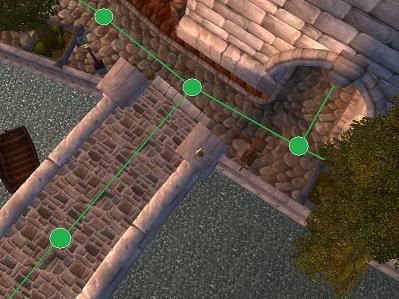
下圖為文章開始時展示的地圖的比較,紅線是wayPoint尋路,藍線是nav。

3. 不能進行動態修正,如果地圖中有動態障礙,處理起來會很困難
如要實現即時戰略遊戲中,一輛在路上行走的坦克會擋住你軍隊的去路,這個移動的坦克就是一個動態障礙。
4. 不能根據角色的特性(不同寬度、高度等)改變路徑
如一個狹窄的通道,普通的人能夠通過,而一輛馬車的寬度超過通道寬度,應該不能通過。
5. 不能儲存地形的附加資訊,如地表高度、地面特徵(水面、沙地等)
比如一個遊戲中的角色在走到沙地上時會降低移動速度,或走在一個斜坡上時人物會發生傾斜等。
NAV導航網格尋路(2) -- 尋路方法
nav尋路一般包含兩部分,首先是使用工具根據地圖資訊生成尋路用的nav mesh,接下來就是在遊戲中根據生成的nav mesh來自動尋路。
一般人首先關心的就是尋路方法,所以這裡把順序顛倒下,先說尋路。
一. 使用A*尋找所經過網格路徑
下圖為一個已經生成nav網格的地圖,深紅色區域為不可行走區域,淺紅色區域為可以行走的區域。

如下圖,現在如果要尋找從A點到B點的路徑,首先要從所有可行走的網格中找到一條最優的網格路徑(圖中紫色的網格),然後再根據這些網格生成所需要的路徑點。
計算最優網格路徑的方法可以使用流行的A*,也可以使用其它方法。A*演算法網上很多就不說了,至於三角網格的A*實現因為涉及網格的資料結構會在系列的最後給出。
二. 生成路徑點
nav尋路最常用的就是光照射線法了,這個在neoragex2002的blog上有講,這裡就不說了
另一種方法就是拐角點法,如下圖
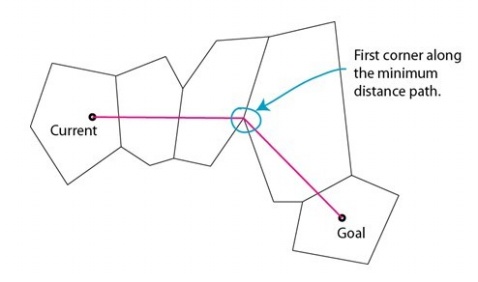
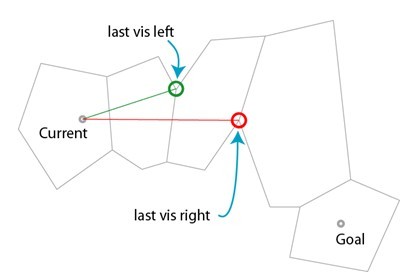
下圖的5個凸多邊形是已經生成的導航網格,多邊形外部的區域為不可行走區域,current為起點,goal為終點,從圖中就可以看出最短路徑為圖中紅線,藍色圈出的點為我們需要找出的點。所有多邊形頂點均按逆時針方向儲存(這些均在生成導航網格時處理,以後會講到)。
(1)下圖顯示出各區域之間的入口,即多邊形的臨邊。由圖中可以看出每個臨邊均為起點穿出該多邊形區域的邊,故以下稱該邊為穿出邊。
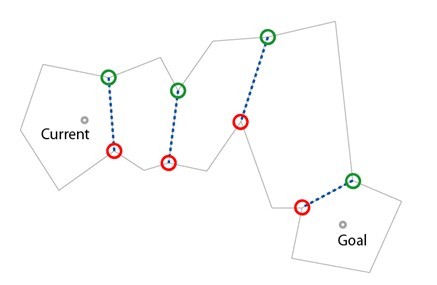
(2)首先找到起始點所在的多邊形和穿出邊的兩個端點,由起點連線兩個端點,形成兩個線段lineLeft 和lineRight。如下圖。綠色圈表示左點,紅色表示右點(左點、右點是根據多邊形頂點儲存順序而來)。

(3)繼續找到下一個穿出邊的兩個端點,判斷新的左點是否在lineLeft 和lineRigh之間,如果在,則更新lineLeft為起點到新左點的線段。
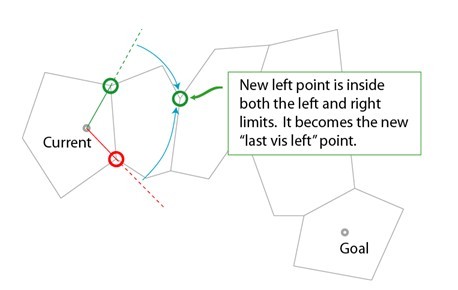
同樣處理新穿出邊的右點,如下圖
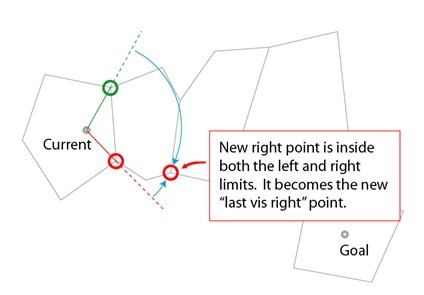
該步最後得到兩個新的線段,如下圖。
(4) 繼續判斷下一個穿出邊的兩個端點,如下圖,新的左點在lineLeft和lineRight的外面,則不更新線段。

下圖說明新的右點在兩條直線之間,更新lineRight。
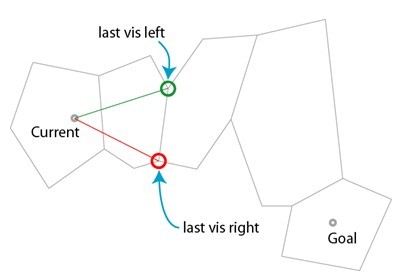
該步最後得到兩個新的線段,如下圖。
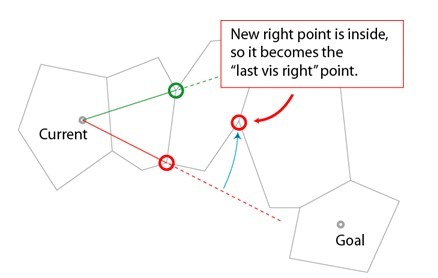
(5) 繼續迴圈判斷下一個穿出邊的兩個端點,該穿出邊的兩個端點都在lineRight的右側,表示lineRight的終點即為路徑的一個拐角點。

(6) 迴圈以上步驟都可以找到從起點到終點的一條完整路徑。
NAV導航網格尋路(3) -- 一些必要的計算幾何知識
在繼續下面的nav網格生成演算法之前,先介紹一下涉及到的計算幾何知識。這裡只羅列出結論,要詳細瞭解參考相關書籍。
- 向量加減法:
設二維向量P = ( x1, y1 ),Q = ( x2 , y2 ),則向量加法定義為: P + Q = ( x1 + x2 , y1 + y2 ),同樣的,向量減法定義為: P - Q = ( x1 - x2 , y1 - y2 )。顯然有性質 P + Q = Q + P,P - Q = - ( Q - P )。 - 向量叉積
設向量P = ( x1, y1 ),Q = ( x2, y2 ),則向量叉積定義為由(0,0)、p1、p2和p1+p2所組成的平行四邊形的帶符號的面積,即:P × Q = x1*y2 - x2*y1,其結果是一個標量。顯然有性質 P × Q = - ( Q × P ) 和 P × ( - Q ) = - ( P × Q )。 - 折線段的拐向判斷:
折線段的拐向判斷方法可以直接由向量叉積的性質推出。對於有公共端點的線段p0p1和p1p2,通過計算(p2 - p0) × (p1 - p0)的符號便可以確定折線段的拐向:
若(p2 - p0) × (p1 - p0) > 0,則p0p1在p1點拐向右側後得到p1p2。
若(p2 - p0) × (p1 - p0) < 0,則p0p1在p1點拐向左側後得到p1p2。
若(p2 - p0) × (p1 - p0) = 0,則p0、p1、p2三點共線。 - 判斷兩線段是否相交:
我們分兩步確定兩條線段是否相交:
(1)快速排斥試驗
設以線段 P1P2 為對角線的矩形為R, 設以線段 Q1Q2 為對角線的矩形為T,如果R和T不相交,顯然兩線段不會相交。
(2)跨立試驗
如果兩線段相交,則兩線段必然相互跨立對方。若P1P2跨立Q1Q2 ,則向量 ( P1 - Q1 ) 和( P2 - Q1 )位於向量( Q2 - Q1 ) 的兩側,即( P1 - Q1 ) × ( Q2 - Q1 ) * ( P2 - Q1 ) × ( Q2 - Q1 ) < 0。上式可改寫成( P1 - Q1 ) × ( Q2 - Q1 ) * ( Q2 - Q1 ) × ( P2 - Q1 ) > 0。當 ( P1 - Q1 ) × ( Q2 - Q1 ) = 0 時,說明 ( P1 - Q1 ) 和 ( Q2 - Q1 )共線,但是因為已經通過快速排斥試驗,所以 P1 一定線上段 Q1Q2上;同理,( Q2 - Q1 ) ×(P2 - Q1 ) = 0 說明 P2 一定線上段 Q1Q2上。所以判斷P1P2跨立Q1Q2的依據是:( P1 - Q1 ) × ( Q2 - Q1 ) * ( Q2 - Q1 ) × ( P2 - Q1 ) >= 0。同理判斷Q1Q2跨立P1P2的依據是:( Q1 - P1 ) × ( P2 - P1 ) * ( P2 - P1 ) × ( Q2 - P1 ) >= 0。 - 凸多邊形
假設我們在一個多邊形上(包括多邊形的邊界及邊界圍封的範圍)任意取兩點並以一條線段連結該兩點,如果線段上的每一點均在該多邊形上,那麼我們便說這個多邊形是凸的。 - 凸包
給定平面上的一個(有限)點集(即一組點),這個點集的凸包就是包含點集中所有點的最小面積的凸多邊形。 - 點在凸多邊形中的判斷
假設多邊形是凸的,而且頂點p0,p1,...,pn按順時針方向排列,則點在多邊形任意一邊 pi-1, pi 的右面。 - Voronoi圖及對偶圖
- Delaunay三角剖分(Voronoi對偶圖)
在實際中運用的最多的三角剖分是Delaunay三角剖分,它是一種特殊的三角剖分。先從Delaunay邊說起:
【定義】Delaunay邊:假設E中的一條邊e(兩個端點為a,b),e若滿足下列條件,則稱之為Delaunay邊:存在一個圓經過a,b兩點,圓內(注意是圓內,圓上最多三點共圓)不含點集V中任何其他的點,這一特性又稱空圓特性。
【定義】Delaunay三角剖分:如果點集V的一個三角剖分T只包含Delaunay邊,那麼該三角剖分稱為Delaunay三角剖分。
以下是Delaunay剖分所具備的優異特性:
1.最接近:以最近臨的三點形成三角形,且各線段(三角形的邊)皆不相交。
2.唯一性:不論從區域何處開始構建,最終都將得到一致的結果。
3.最優性:任意兩個相鄰三角形形成的凸四邊形的對角線如果可以互換的話,那麼兩個三角形六個內角中最小的角度不會變大。
4.最規則:如果將三角網中的每個三角形的最小角進行升序排列,則Delaunay三角網的排列得到的數值最大。
5.區域性:新增、刪除、移動某一個頂點時只會影響臨近的三角形。
6.具有凸多邊形的外殼:三角網最外層的邊界形成一個凸多邊形的外殼。 - 多邊形裁剪
Weiler-Athenton演算法



–主多邊形:被裁剪多邊形,記為A
–裁剪多邊形:裁剪視窗,記為B
多邊形頂點的排列順序(使多邊形區域位於有向邊的左側 )外環:逆時針 ;內環:順時針
主多邊形和裁剪多邊形把二維平面分成兩部分。
內裁剪:A∩B
外裁剪:A-B

裁剪結果區域的邊界由A的部分邊界和B的部分邊界兩部分構成,並且在交點處邊界發生交替,即由A的邊界轉至B的邊界,或由B的邊界轉至A的邊界。
如果主多邊形與裁剪多邊形有交點,則交點成對出現,它們被分為如下兩類:
進點:主多邊形邊界由此進入裁剪多邊形內 如,I1,I3, I5, I7, I9, I11
出點:主多邊形邊界由此離開裁剪多邊形區域. 如, I0,I2, I4, I6, I8, I10
演算法步驟

(1)建立空的裁剪結果多邊形的頂點表.
(2)選取任一沒有被跟蹤過的交點為始點,將其輸出到結果多邊形頂點表中.
(3)如果該交點為進點,跟蹤主多邊形邊邊界;否則跟蹤裁剪多邊形邊界.
(4) 跟蹤多邊形邊界,每遇到多邊形頂點,將其輸出到結果多邊形頂點表中,直至遇到新的交點.
(5)將該交點輸出到結果多邊形頂點表中,並通過連線該交點的雙向指標改變跟蹤方向(如果上一步跟蹤的是主多邊形邊界,現在改為跟蹤裁剪多邊形邊界;如果上一步跟蹤裁剪多邊形邊界,現在改為跟蹤主多邊形邊界).
(6)重複(4)、(5)直至回到起點
NAV導航網格尋路(4) -- 生成nav網格

假設上圖是一個遊戲地圖,紅色的區域是不可行走的區域,淺灰色區域是可行走區域,要想在遊戲中實現nav尋路,必須將可行走區域轉化為nav網格並儲存為一種固定形式的資料,如下圖淺紅色的三角形。

nav網格必須是凸多邊形,這裡使用三角型,當然也可以使用4邊形。下面介紹一種任意多邊形的三角化演算法。演算法來自論文《平面多邊形域的快速約束Delaunay三角化》作者:曾薇 孟祥旭 楊承磊 楊義軍。詳細內容請參考該論文。
先來看幾個定義:
A. 我們稱點 p3 為直線 p1p2 的可見點,其必須滿足下面三個條件:
(1) p3 在邊 p1p2 的右側 (頂點順序為順時針);
(2) p3 與 p1 可見,即 p1p3 不與任何一個約束邊相交;
(3) p3 與 p2 可見
B. DT點
在一個約束Delaunay三角形中,其中與一條邊相對的頂點稱為該邊的DT點。
確定 DT 點的過程如下:
Step1. 構造 Δp1p2p3 的外接圓 C(p1,p2,p3)及其網格包圍盒 B(C(p1,p2,p3))
Step2. 依次訪問網格包圍盒內的每個網格單元:
對未作當前趟數標記的網格單元進行搜尋,並將其標記為當前趟數
若某個網格單元中存在可見點 p, 並且 ∠p1pp2 > ∠p1p3p2,則令 p3=p1,轉Step1;否則,轉Step3.
Step3. 若當前網格包圍盒內所有網格單元都已被標記為當前趟數,也即C(p1,p2,p3)內無可見點,則 p3 為的 p1p2 的 DT 點
生成Delaunay三角網格演算法如下:
Step2. 取任意一條外邊界邊 p1p2 .
Step3. 計算 DT 點 p3,構成約束 Delaunay 三角形 Δp1p2p3 .
Step4. 如果新生成的邊 p1p3 不是約束邊,若已經在堆疊中,則將其從中刪除;否則,將其放入堆疊;類似地,可處理 p3p2 .
Step5. 若堆疊不空,則從中取出一條邊,轉Step3;否則,演算法停止 .
程式實現該演算法(AS3語言)
1。資料結構
不難看出,要想實現該演算法首先要確定一些基礎物件,如點、線、三角型和多邊形等物件。(才發現這個blog中竟然沒有程式碼的格式 )
)
二維點的定義 public class Vector2f {} 包括向量加減、叉積等方法。
線的定義 public class Line2D {} 包括下面方法:
classifyPoint(point:Vector2f, epsilon:Number = 0.000001):int
判斷點與直線的關係,假設你站在a點朝向b點, 則輸入點與直線的關係分為:Left, Right or Centered on the line
equals(line:Line2D):Boolean
線段是否相等 (忽略方向)
getDirection():Vector2f
直線方向
intersection(other:Line2D, pIntersectPoint:Vector2f = null):int
判斷兩個直線關係 this line A = x0, y0 and B = x1, y1 other is A = x2, y2 and B = x3, y3
length():Number
直線長度
signedDistance(point:Vector2f):Number
給定點到直線的帶符號距離,從a點朝向b點,右向為正,左向為負
三角型定義 public class Triangle:
getSide(sideIndex:int):Line2D
取得指定索引的邊(從0開始,順時針)
getVertex(i:int):Vector2f
根據i返回頂點
isPointIn(testPoint:Vector2f):Boolean
測試給定點是否在三角型中
setVertex(i:int, point:Vector2f):void
根據i指定的索引設定三角形的頂點
多邊形定義 public class Polygon:
public vertexV : Vector.<Vector2f> //頂點列表,按順時針方向排序
cw():void
將多邊形的頂點按逆時針排序
isCW():Boolean
將多邊形的頂點按順時針排序
isSimplicity():Boolean
是否是簡單多邊形
rectangle():Rectangle
返回矩形包圍盒 Polygon
union(polygon:Polygon):Vector.<Polygon>
合併兩個多邊形(Weiler-Athenton演算法)
三角化的完整程式碼,註釋比較全,就不再詳細解釋了
<span style="background-color: rgb(255, 255, 255);">/*
* @author 白連忱
* date Jan 22, 2010
*/
package org.blch.geom
{
import flash.display.Sprite;
import flash.geom.Rectangle;
import flash.text.TextField;
import flash.text.TextFieldAutoSize;
import flash.text.TextFormat;
/**
* Delaunay
* @langversion ActionScript 3.0
* @playerversion Flash 10.0
*/
public class Delaunay
{
public function Delaunay()
{
}
private static const EPSILON:Number = 0.000001; //精度
private var polygonV:Vector.<Polygon>; //所有多邊形,第0個元素為區域外邊界 (輸入資料)
private var vertexV:Vector.<Vector2f>; //所有頂點列表, 前outEdgeVecNmu個為外邊界頂點
private var edgeV:Vector.<Line2D>; //所有約束邊
private var outEdgeVecNmu:int; //區域外邊界頂點數
private var lineV:Vector.<Line2D>; //線段堆疊
private var triangleV:Vector.<Triangle>; //生成的Delaunay三角形
public function createDelaunay(polyV:Vector.<Polygon>):Vector.<Triangle> {
//Step1. 建立單元大小為 E*E 的均勻網格,並將多邊形的頂點和邊放入其中.
// 其中 E=sqrt(w*h/n),w 和 h 分別為多邊形域包圍盒的寬度、高度,n 為多邊形域的頂點數 .
initData(polyV);
//Step2. 取任意一條外邊界邊 p1p2 .
var initEdge:Line2D = getInitOutEdge();
lineV.push(initEdge);
var edge:Line2D;
do {
//Step3. 計算 DT 點 p3,構成約束 Delaunay 三角形 Δp1p2p3 .
edge = lineV.pop();
// trace("開始處理edge###########:", edge);
var p3:Vector2f = findDT(edge);
if (p3 == null) continue;
var line13:Line2D = new Line2D(edge.getPointA(), p3);
var line32:Line2D = new Line2D(p3, edge.getPointB());
//Delaunay三角形放入輸出陣列
var trg:Triangle = new Triangle(edge.getPointA(), edge.getPointB(), p3);
// trace("DT 點p3", p3);
// trace("Triangle", trg);
triangleV.push(trg);
//Step4. 如果新生成的邊 p1p3 不是約束邊,若已經在堆疊中,
// 則將其從中刪除;否則,將其放入堆疊;類似地,可處理 p3p2 .
var index:int;
if (indexOfVector(line13, this.edgeV) < 0) {
index = indexOfVector(line13, lineV);
if (index > -1) {
lineV.splice(index, 1);
} else {
lineV.push(line13);
}
}
if (indexOfVector(line32, this.edgeV) < 0) {
index = indexOfVector(line32, lineV);
if (index > -1) {
lineV.splice(index, 1);
} else {
lineV.push(line32);
}
}
//Step5. 若堆疊不空,則從中取出一條邊,轉Step3;否則,演算法停止 .
// trace("處理結束edge###########\n");
} while (lineV.length > 0);
return triangleV;
}
/**
* 初始化資料
* @param polyV
*/
private function initData(polyV:Vector.<Polygon>):void {
//填充頂點和線列表
vertexV = new Vector.<Vector2f>();
edgeV = new Vector.<Line2D>();
var poly:Polygon;
for (var i:int=0; i<polyV.length; i++) {
poly = polyV[i];
putVertex(vertexV, poly.vertexV);
putEdge(edgeV, poly.vertexV);
}
outEdgeVecNmu = polyV[0].vertexNmu;
lineV = new Vector.<Line2D>();
triangleV = new Vector.<Triangle>();
}
/**
* 獲取初始外邊界
* @return
*/
private function getInitOutEdge():Line2D {
var initEdge:Line2D = edgeV[0];
//檢查是否有頂點p在該邊上,如果有則換一個外邊界
var loopSign:Boolean;
var loopIdx:int = 0;
do {
loopSign = false;
loopIdx++;
for each (var testV:Vector2f in this.vertexV) {
if ( testV.equals(initEdge.getPointA()) || testV.equals(initEdge.getPointB()) ) continue;
if (initEdge.classifyPoint(testV, EPSILON) == PointClassification.ON_LINE) {
loopSign = true;
initEdge = edgeV[loopIdx];
break;
}
}
} while (loopSign && loopIdx<outEdgeVecNmu-1); //只取外邊界
return initEdge;
}
/**
* 將srcV中的點放入dstV
* @param dstV
* @param srcV
*/
private function putVertex(dstV:Vector.<Vector2f>, srcV:Vector.<Vector2f>):void {
for each (var item:Vector2f in srcV) {
dstV.push(item);
}
}
/**
* 根據srcV中的點生成多邊形線段,並放入dstV
* @param dstV
* @param srcV
*/
private function putEdge(dstV:Vector.<Line2D>, srcV:Vector.<Vector2f>):void {
if (srcV.length < 3) return; //不是一個多邊形
var p1:Vector2f = srcV[0];
var p2:Vector2f;
for (var i:int=1; i<srcV.length; i++) {
p2 = srcV[i];
dstV.push(new Line2D(p1, p2));
p1 = p2;
}
p2 = srcV[0];
dstV.push(new Line2D(p1, p2));
}
/**
* 判斷線段是否是約束邊
* @param line
* @return 線段的索引,如果沒有找到,返回-1
*/
private function indexOfVector(line:Line2D, vector:Vector.<Line2D>):int {
var lt:Line2D;
for (var i:int=0; i<vector.length; i++) {
lt = vector[i];
if (lt.equals(line)) return i;
}
return -1;
}
/**
* 計算 DT 點
* @param line
* @return
*/
private function findDT(line:Line2D):Vector2f {
var p1:Vector2f = line.getPointA();
var p2:Vector2f = line.getPointB();
//搜尋所有可見點 TODO 按y方向搜尋距線段終點最近的點
var allVPoint:Vector.<Vector2f> = new Vector.<Vector2f>(); // line的所有可見點
for each (var vt:Vector2f in this.vertexV) {
if (isVisiblePointOfLine(vt, line)) {
allVPoint.push(vt);
}
}
if (allVPoint.length == 0) return null;
var p3:Vector2f = allVPoint[0];
var loopSign:Boolean = false;
do {
loopSign = false;
//Step1. 構造 Δp1p2p3 的外接圓 C(p1,p2,p3)及其網格包圍盒 B(C(p1,p2,p3))
var circle:Circle = this.circumCircle(p1, p2, p3);
var boundsBox:Rectangle = this.circleBounds(circle);
//Step2. 依次訪問網格包圍盒內的每個網格單元:
// 若某個網格單元中存在可見點 p, 並且 ∠p1pp2 > ∠p1p3p2,則令 p3=p,轉Step1;否則,轉Step3.
var angle132:Number = Math.abs(lineAngle(p1, p3, p2)); // ∠p1p3p2
for each (var vec:Vector2f in allVPoint) {
if ( vec.equals(p1) || vec.equals(p2) || vec.equals(p3) ) {
continue;
}
//不在包圍盒中
if (boundsBox.contains(vec.x, vec.y) == false) {
continue;
}
//夾角
var a1:Number = Math.abs(lineAngle(p1, vec, p2));
if (a1 > angle132) {
/////轉Step1
p3 = vec;
loopSign = true;
break;
}
}
///////轉Step3
} while (loopSign);
//Step3. 若當前網格包圍盒內所有網格單元都已被處理完,
// 也即C(p1,p2,p3)內無可見點,則 p3 為的 p1p2 的 DT 點
return p3;
}
/**
* 返回頂角在o點,起始邊為os,終止邊為oe的夾角, 即∠soe (單位:弧度)
* 角度小於pi,返回正值; 角度大於pi,返回負值
*/
private function lineAngle(s:Vector2f, o:Vector2f, e:Vector2f):Number
{
var cosfi:Number, fi:Number, norm:Number;
var dsx:Number = s.x - o.x;
var dsy:Number = s.y - o.y;
var dex:Number = e.x - o.x;
var dey:Number = e.y - o.y;
cosfi = dsx*dex + dsy*dey;
norm = (dsx*dsx + dsy*dsy) * (dex*dex + dey*dey);
cosfi /= Math.sqrt( norm );
if (cosfi >= 1.0 ) return 0;
if (cosfi <= -1.0 ) return -Math.PI;
fi = Math.acos(cosfi);
if (dsx*dey - dsy*dex > 0) return fi; // 說明向量os 在向量 oe的順時針方向
return -fi;
}
/**
* 返回圓的包圍盒
* @param c
* @return
*/
private function circleBounds(c:Circle):Rectangle {
return new Rectangle(c.center.x-c.r, c.center.y-c.r, c.r*2, c.r*2);
}
/**
* 返回三角形的外接圓
* @param p1
* @param p2
* @param p3
* @return
*/
private function circumCircle(p1:Vector2f, p2:Vector2f, p3:Vector2f):Circle {
var m1:Number,m2:Number,mx1:Number,mx2:Number,my1:Number,my2:Number;
var dx:Number,dy:Number,rsqr:Number,drsqr:Number;
var xc:Number, yc:Number, r:Number;
/* Check for coincident points */
if ( Math.abs(p1.y-p2.y) < EPSILON && Math.abs(p2.y-p3.y) < EPSILON )
{
trace("CircumCircle: Points are coincident.");
return null;
}
m1 = - (p2.x - p1.x) / (p2.y - p1.y);
m2 = - (p3.x-p2.x) / (p3.y-p2.y);
mx1 = (p1.x + p2.x) / 2.0;
mx2 = (p2.x + p3.x) / 2.0;
my1 = (p1.y + p2.y) / 2.0;
my2 = (p2.y + p3.y) / 2.0;
if ( Math.abs(p2.y-p1.y) < EPSILON ) {
xc = (p2.x + p1.x) / 2.0;
yc = m2 * (xc - mx2) + my2;
} else if ( Math.abs(p3.y - p2.y) < EPSILON ) {
xc = (p3.x + p2.x) / 2.0;
yc = m1 * (xc - mx1) + my1;
} else {
xc = (m1 * mx1 - m2 * mx2 + my2 - my1) / (m1 - m2);
yc = m1 * (xc - mx1) + my1;
}
dx = p2.x - xc;
dy = p2.y - yc;
rsqr = dx*dx + dy*dy;
r = Math.sqrt(rsqr);
return new Circle(new Vector2f(xc, yc), r);
}
/**
* 判斷點vec是否為line的可見點
* @param vec
* @param line
* @return true:vec是line的可見點
*/
private function isVisiblePointOfLine(vec:Vector2f, line:Line2D):Boolean {
if (vec.equals(line.getPointA()) || vec.equals(line.getPointB())) {
return false;
}
//(1) p3 在邊 p1p2 的右側 (多邊形頂點順序為順時針);
if (line.classifyPoint(vec, EPSILON) != PointClassification.RIGHT_SIDE)
{
return false;
}
//(2) p3 與 p1 可見,即 p1p3 不與任何一個約束邊相交;
if (isVisibleIn2Point(line.getPointA(), vec) == false) {
return false;
}
//(3) p3 與 p2 可見
if (isVisibleIn2Point(line.getPointB(), vec) == false) {
return false;
}
return true;
}
/**
* 點pa和pb是否可見(pa和pb構成的線段不與任何約束邊相交,不包括頂點)
* @param pa
* @param pb
* @return
*/
private function isVisibleIn2Point(pa:Vector2f, pb:Vector2f):Boolean {
var linepapb:Line2D = new Line2D(pa, pb);
var interscetVector:Vector2f = new Vector2f(); //線段交點
for each (var lineTmp:Line2D in this.edgeV) {
//兩線段相交
if (linepapb.intersection(lineTmp, interscetVector) == LineClassification.SEGMENTS_INTERSECT) {
//交點是不是端點
if ( !pa.equals(interscetVector) && !pb.equals(interscetVector) ) {
return false;
}
}
}
return true;
}
}
}
import org.blch.geom.Vector2f;
/**
* 圓
* @author blc
*/
class Circle {
public var center:Vector2f; //圓心
public var r:Number; //半徑
public function Circle(cen:Vector2f, r:Number) {
this.center = cen;
this.r = r;
}
}</span>NAV導航網格尋路(5) -- 生成網格的一些補充
如果你也實現了上一章提到的程式碼,不難發現對下圖的兩種情況會出現問題

左面的是兩個區域有相交的情況,右面的是多邊形本身有自交,在這兩種情況下,前面給出的程式碼均會產生錯誤的結果。
對於兩個多邊形相交,可以在生成網格之前先合併多邊形,合併後如圖

合併演算法在前面多邊形剪裁處已給出一個,這裡只貼上程式碼:
<span style="background-color: rgb(255, 255, 255);"> /**
* 合併兩個多邊形(Weiler-Athenton演算法)
* @param polygon
* @return
* null--兩個多邊形不相交,合併前後兩個多邊形不變
* Polygon--一個新的多邊形
*/
public function union(polygon:Polygon):Vector.<Polygon> {
//包圍盒不相交
if (rectangle().intersection(polygon.rectangle()) == false) {
return null;
}
//所有頂點和交點
var cv0:Vector.<Node> = new Vector.<Node>();//主多邊形
var cv1:Vector.<Node> = new Vector.<Node>();//合併多邊形
//初始化
var node:Node;
for (var i:int=0; i<this.vertexV.length; i++) {
node = new Node(this.vertexV[i], false, true);
if (i > 0) {
cv0[i-1].next = node;
}
cv0.push(node);
}
for (var j:int=0; j<polygon.vertexV.length; j++) {
node = new Node(polygon.vertexV[j], false, false);
if (j > 0) {
cv1[j-1].next = node;
}
cv1.push(node);
}
//插入交點
var insCnt:int = this.intersectPoint(cv0, cv1);