
四元素與尤拉角的轉換及定義、程式碼
阿新 • • 發佈:2019-01-03
在3D圖形學中,最常用的旋轉表示方法便是四元數和尤拉角,比起矩陣來具有節省儲存空間和方便插值的優點。本文主要歸納了兩種表達方式的轉換,計算公式採用3D笛卡爾座標系:
 角
角 的取值範圍已經滿足),因此需要用atan2來代替arctan。
的取值範圍已經滿足),因此需要用atan2來代替arctan。
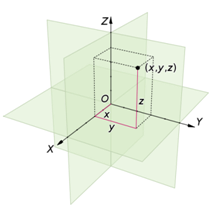
圖1 3D Cartesian coordinate System (from wikipedia)
定義 分別為繞Z軸、Y軸、X軸的旋轉角度,如果用Tait-Bryan angle表示,分別為Yaw、Pitch、Roll。
分別為繞Z軸、Y軸、X軸的旋轉角度,如果用Tait-Bryan angle表示,分別為Yaw、Pitch、Roll。
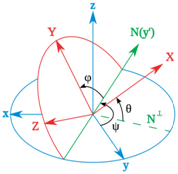
圖2 Tait-Bryan angles (from wikipedia)
一、四元數的定義
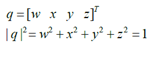
通過旋轉軸和繞該軸旋轉的角度可以構造一個四元數:
其中 是繞旋轉軸旋轉的角度,
是繞旋轉軸旋轉的角度, 為旋轉軸在x,y,z方向的分量(由此確定了旋轉軸)。
為旋轉軸在x,y,z方向的分量(由此確定了旋轉軸)。
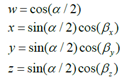
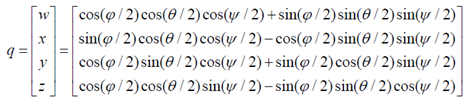
二、尤拉角到四元數的轉換
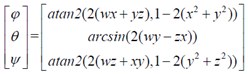
三、四元數到尤拉角的轉換
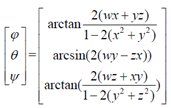
arctan和arcsin的結果是
角的取值範圍已經滿足),因此需要用atan2來代替arctan。
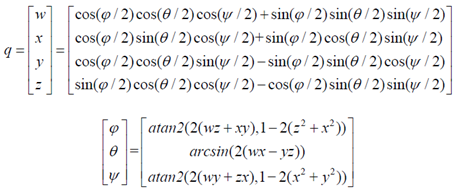
四、在其他座標系下使用
在其他座標系下,需根據座標軸的定義,調整一下以上公式。如在Direct3D中,笛卡爾座標系的X軸變為Z軸,Y軸變為X軸,Z軸變為Y軸(無需考慮方向)。
參考文獻及程式碼http://www.euclideanspace.com/maths/geometry/rotations/conversions/quaternionToEuler/
示例程式碼