
yolov3 pytorch實現1
yolo不多做介紹,請參相關部落格和論文
本文主要是使用pytorch來對yolo中每一步進行實現 參考:https://blog.paperspace.com/tag/series-yolo/
需要了解:
- 卷積神經網路原理及pytorch實現
- yolo等目標檢測演算法的檢測原理,相關概念如 anchor(錨點)、ROI(感興趣區域)、IOU(交併比)、NMS(非極大值抑制)、LR softmax分類、邊框迴歸等
本文主要分為四個部分:
- yolo網路層級的定義
- 向前傳播
- 置信度閾值和非極大值抑制
- 輸入和輸出流程
yolo網路層級的定義
Darknet 是 yolo 對目標特徵提取的框架,從yolov1的darknet 到 v2,v3的darknet-19,darknet-53



可以看到yolov3的時候已經沒有全連線層了,最後只有一個池化層,還加入了resnet的機制。
Demo layer filters size input output 0 conv 32 3 x 3 / 1 416 x 416 x 3 -> 416 x 416 x 32 0.299 BFLOPs 1 conv 64 3 x 3 / 2 416 x 416 x 32 -> 208 x 208 x 64 1.595 BFLOPs 2 conv 32 1 x 1 / 1 208 x 208 x 64 -> 208 x 208 x 32 0.177 BFLOPs 3 conv 64 3 x 3 / 1 208 x 208 x 32 -> 208 x 208 x 64 1.595 BFLOPs 4 res 1 208 x 208 x 64 -> 208 x 208 x 64 5 conv 128 3 x 3 / 2 208 x 208 x 64 -> 104 x 104 x 128 1.595 BFLOPs 6 conv 64 1 x 1 / 1 104 x 104 x 128 -> 104 x 104 x 64 0.177 BFLOPs 7 conv 128 3 x 3 / 1 104 x 104 x 64 -> 104 x 104 x 128 1.595 BFLOPs 8 res 5 104 x 104 x 128 -> 104 x 104 x 128 9 conv 64 1 x 1 / 1 104 x 104 x 128 -> 104 x 104 x 64 0.177 BFLOPs 10 conv 128 3 x 3 / 1 104 x 104 x 64 -> 104 x 104 x 128 1.595 BFLOPs 11 res 8 104 x 104 x 128 -> 104 x 104 x 128 12 conv 256 3 x 3 / 2 104 x 104 x 128 -> 52 x 52 x 256 1.595 BFLOPs 13 conv 128 1 x 1 / 1 52 x 52 x 256 -> 52 x 52 x 128 0.177 BFLOPs 14 conv 256 3 x 3 / 1 52 x 52 x 128 -> 52 x 52 x 256 1.595 BFLOPs 15 res 12 52 x 52 x 256 -> 52 x 52 x 256 16 conv 128 1 x 1 / 1 52 x 52 x 256 -> 52 x 52 x 128 0.177 BFLOPs 17 conv 256 3 x 3 / 1 52 x 52 x 128 -> 52 x 52 x 256 1.595 BFLOPs 18 res 15 52 x 52 x 256 -> 52 x 52 x 256 19 conv 128 1 x 1 / 1 52 x 52 x 256 -> 52 x 52 x 128 0.177 BFLOPs 20 conv 256 3 x 3 / 1 52 x 52 x 128 -> 52 x 52 x 256 1.595 BFLOPs 21 res 18 52 x 52 x 256 -> 52 x 52 x 256 22 conv 128 1 x 1 / 1 52 x 52 x 256 -> 52 x 52 x 128 0.177 BFLOPs 23 conv 256 3 x 3 / 1 52 x 52 x 128 -> 52 x 52 x 256 1.595 BFLOPs 24 res 21 52 x 52 x 256 -> 52 x 52 x 256 25 conv 128 1 x 1 / 1 52 x 52 x 256 -> 52 x 52 x 128 0.177 BFLOPs 26 conv 256 3 x 3 / 1 52 x 52 x 128 -> 52 x 52 x 256 1.595 BFLOPs 27 res 24 52 x 52 x 256 -> 52 x 52 x 256 28 conv 128 1 x 1 / 1 52 x 52 x 256 -> 52 x 52 x 128 0.177 BFLOPs 29 conv 256 3 x 3 / 1 52 x 52 x 128 -> 52 x 52 x 256 1.595 BFLOPs 30 res 27 52 x 52 x 256 -> 52 x 52 x 256 31 conv 128 1 x 1 / 1 52 x 52 x 256 -> 52 x 52 x 128 0.177 BFLOPs 32 conv 256 3 x 3 / 1 52 x 52 x 128 -> 52 x 52 x 256 1.595 BFLOPs 33 res 30 52 x 52 x 256 -> 52 x 52 x 256 34 conv 128 1 x 1 / 1 52 x 52 x 256 -> 52 x 52 x 128 0.177 BFLOPs 35 conv 256 3 x 3 / 1 52 x 52 x 128 -> 52 x 52 x 256 1.595 BFLOPs 36 res 33 52 x 52 x 256 -> 52 x 52 x 256 37 conv 512 3 x 3 / 2 52 x 52 x 256 -> 26 x 26 x 512 1.595 BFLOPs 38 conv 256 1 x 1 / 1 26 x 26 x 512 -> 26 x 26 x 256 0.177 BFLOPs 39 conv 512 3 x 3 / 1 26 x 26 x 256 -> 26 x 26 x 512 1.595 BFLOPs 40 res 37 26 x 26 x 512 -> 26 x 26 x 512 41 conv 256 1 x 1 / 1 26 x 26 x 512 -> 26 x 26 x 256 0.177 BFLOPs 42 conv 512 3 x 3 / 1 26 x 26 x 256 -> 26 x 26 x 512 1.595 BFLOPs 43 res 40 26 x 26 x 512 -> 26 x 26 x 512 44 conv 256 1 x 1 / 1 26 x 26 x 512 -> 26 x 26 x 256 0.177 BFLOPs 45 conv 512 3 x 3 / 1 26 x 26 x 256 -> 26 x 26 x 512 1.595 BFLOPs 46 res 43 26 x 26 x 512 -> 26 x 26 x 512 47 conv 256 1 x 1 / 1 26 x 26 x 512 -> 26 x 26 x 256 0.177 BFLOPs 48 conv 512 3 x 3 / 1 26 x 26 x 256 -> 26 x 26 x 512 1.595 BFLOPs 49 res 46 26 x 26 x 512 -> 26 x 26 x 512 50 conv 256 1 x 1 / 1 26 x 26 x 512 -> 26 x 26 x 256 0.177 BFLOPs 51 conv 512 3 x 3 / 1 26 x 26 x 256 -> 26 x 26 x 512 1.595 BFLOPs 52 res 49 26 x 26 x 512 -> 26 x 26 x 512 53 conv 256 1 x 1 / 1 26 x 26 x 512 -> 26 x 26 x 256 0.177 BFLOPs 54 conv 512 3 x 3 / 1 26 x 26 x 256 -> 26 x 26 x 512 1.595 BFLOPs 55 res 52 26 x 26 x 512 -> 26 x 26 x 512 56 conv 256 1 x 1 / 1 26 x 26 x 512 -> 26 x 26 x 256 0.177 BFLOPs 57 conv 512 3 x 3 / 1 26 x 26 x 256 -> 26 x 26 x 512 1.595 BFLOPs 58 res 55 26 x 26 x 512 -> 26 x 26 x 512 59 conv 256 1 x 1 / 1 26 x 26 x 512 -> 26 x 26 x 256 0.177 BFLOPs 60 conv 512 3 x 3 / 1 26 x 26 x 256 -> 26 x 26 x 512 1.595 BFLOPs 61 res 58 26 x 26 x 512 -> 26 x 26 x 512 62 conv 1024 3 x 3 / 2 26 x 26 x 512 -> 13 x 13 x1024 1.595 BFLOPs 63 conv 512 1 x 1 / 1 13 x 13 x1024 -> 13 x 13 x 512 0.177 BFLOPs 64 conv 1024 3 x 3 / 1 13 x 13 x 512 -> 13 x 13 x1024 1.595 BFLOPs 65 res 62 13 x 13 x1024 -> 13 x 13 x1024 66 conv 512 1 x 1 / 1 13 x 13 x1024 -> 13 x 13 x 512 0.177 BFLOPs 67 conv 1024 3 x 3 / 1 13 x 13 x 512 -> 13 x 13 x1024 1.595 BFLOPs 68 res 65 13 x 13 x1024 -> 13 x 13 x1024 69 conv 512 1 x 1 / 1 13 x 13 x1024 -> 13 x 13 x 512 0.177 BFLOPs 70 conv 1024 3 x 3 / 1 13 x 13 x 512 -> 13 x 13 x1024 1.595 BFLOPs 71 res 68 13 x 13 x1024 -> 13 x 13 x1024 72 conv 512 1 x 1 / 1 13 x 13 x1024 -> 13 x 13 x 512 0.177 BFLOPs 73 conv 1024 3 x 3 / 1 13 x 13 x 512 -> 13 x 13 x1024 1.595 BFLOPs 74 res 71 13 x 13 x1024 -> 13 x 13 x1024 75 conv 512 1 x 1 / 1 13 x 13 x1024 -> 13 x 13 x 512 0.177 BFLOPs 76 conv 1024 3 x 3 / 1 13 x 13 x 512 -> 13 x 13 x1024 1.595 BFLOPs 77 conv 512 1 x 1 / 1 13 x 13 x1024 -> 13 x 13 x 512 0.177 BFLOPs 78 conv 1024 3 x 3 / 1 13 x 13 x 512 -> 13 x 13 x1024 1.595 BFLOPs 79 conv 512 1 x 1 / 1 13 x 13 x1024 -> 13 x 13 x 512 0.177 BFLOPs 80 conv 1024 3 x 3 / 1 13 x 13 x 512 -> 13 x 13 x1024 1.595 BFLOPs 81 conv 255 1 x 1 / 1 13 x 13 x1024 -> 13 x 13 x 255 0.088 BFLOPs 82 detection 83 route 79 84 conv 256 1 x 1 / 1 13 x 13 x 512 -> 13 x 13 x 256 0.044 BFLOPs 85 upsample 2x 13 x 13 x 256 -> 26 x 26 x 256 86 route 85 61 87 conv 256 1 x 1 / 1 26 x 26 x 768 -> 26 x 26 x 256 0.266 BFLOPs 88 conv 512 3 x 3 / 1 26 x 26 x 256 -> 26 x 26 x 512 1.595 BFLOPs 89 conv 256 1 x 1 / 1 26 x 26 x 512 -> 26 x 26 x 256 0.177 BFLOPs 90 conv 512 3 x 3 / 1 26 x 26 x 256 -> 26 x 26 x 512 1.595 BFLOPs 91 conv 256 1 x 1 / 1 26 x 26 x 512 -> 26 x 26 x 256 0.177 BFLOPs 92 conv 512 3 x 3 / 1 26 x 26 x 256 -> 26 x 26 x 512 1.595 BFLOPs 93 conv 255 1 x 1 / 1 26 x 26 x 512 -> 26 x 26 x 255 0.177 BFLOPs 94 detection 95 route 91 96 conv 128 1 x 1 / 1 26 x 26 x 256 -> 26 x 26 x 128 0.044 BFLOPs 97 upsample 2x 26 x 26 x 128 -> 52 x 52 x 128 98 route 97 36 99 conv 128 1 x 1 / 1 52 x 52 x 384 -> 52 x 52 x 128 0.266 BFLOPs 100 conv 256 3 x 3 / 1 52 x 52 x 128 -> 52 x 52 x 256 1.595 BFLOPs 101 conv 128 1 x 1 / 1 52 x 52 x 256 -> 52 x 52 x 128 0.177 BFLOPs 102 conv 256 3 x 3 / 1 52 x 52 x 128 -> 52 x 52 x 256 1.595 BFLOPs 103 conv 128 1 x 1 / 1 52 x 52 x 256 -> 52 x 52 x 128 0.177 BFLOPs 104 conv 256 3 x 3 / 1 52 x 52 x 128 -> 52 x 52 x 256 1.595 BFLOPs 105 conv 255 1 x 1 / 1 52 x 52 x 256 -> 52 x 52 x 255 0.353 BFLOPs 106 detection
1.具體效能比較暫不多提,實現方法如下:
darknet 網路的 config 從官網中可以下載: https://pjreddie.com/darknet/yolo/
每個config包含如下一些模組:
1.1.卷積網路模型,步長有1、2。步長為2做上取樣

1.2.yolo3中shortcut 類似於resnet,跨通道連線,

1.3.route層。當層級有兩個值時,它將返回由這兩個值索引的拼接特徵圖。實驗中為-1 和 61,因此該層級將輸出從前一層級(-1)到第 61 層的特徵圖,並將它們按深度拼接。最後檢測時像FPN中對不同層次的特徵一個結合,更好檢測小目標
1. 4.上取樣層

1.5.net網路訓練的引數層

1.6.yolo層,設定一些引數,anchor的尺寸是由k-means聚類得到的

所以我們要解析config檔案來構建我們的網路。首先建立darknet.py 檔案(讀取的是yolo3的darknet-53)
from __future__ import division
import torch
import torch.nn as nn
import torch.nn.functional as F
from torch.autograd import Variable
import numpy as np
def parse_cfg(cfgfile):
#解析cfg,將每個塊儲存為詞典(鍵 值),然後新增到列表blocks中
file = open(cfgfile, 'r')
lines = file.read().split('\n') #按行儲存
lines = [x for x in lines if len(x) > 0] #不讀空行
lines = [x for x in lines if x[0] != '#'] #不讀註釋
lines = [x.rstrip().lstrip() for x in lines]#去除邊緣空白
#遍歷列表 得到塊
block = {}
blocks = []
for line in lines:
if line[0] == '[': #起始mark 標記
if len(block) != 0: #判斷是否為空
blocks.append(block)
block = {} #重新初始化block
block["type"] = line[1:-1].rstrip()
else:
key, value = line.split('=')
block[key.rstrip()] = value.lstrip()
blocks.append(block)
print(blocks)
return blocksblocks 是以字典的形式儲存資訊,輸出為:
{'type': 'convolutional', 'batch_normalize': '1', 'filters': '32', 'size': '3', 'stride': '1', 'pad': '1', 'activation': 'leaky'}, {'type': 'convolutional', 'batch_normalize': '1', 'filters': '64', 'size': '3', 'stride': '2', 'pad': '1', 'activation': 'leaky'},
{'type': 'shortcut', 'from': '-3', 'activation': 'linear'},
{'type': 'route', 'layers': '-4'},
{'type': 'upsample', 'stride': '2'},
{'type': 'net', 'batch': '1', 'subdivisions': '1', 'width': '416', 'height': '416', 'channels': '3', 'momentum': '0.9', 'decay': '0.0005', 'angle': '0', 'saturation': '1.5', 'exposure': '1.5', 'hue': '.1', 'learning_rate': '0.001', 'burn_in': '1000', 'max_batches': '500200', 'policy': 'steps', 'steps': '400000,450000', 'scales': '.1,.1'},
{'type': 'yolo', 'mask': '0,1,2', 'anchors': '10,13, 16,30, 33,23, 30,61, 62,45, 59,119, 116,90, 156,198, 373,326', 'classes': '80', 'num': '9', 'jitter': '.3', 'ignore_thresh': '.5', 'truth_thresh': '1', 'random': '1'},
然後利用字典中的資訊構建網路層:
def create_modules(blocks):
net_info = blocks[0]#儲存網路資訊
module_list = nn.ModuleList()
prev_fileters = 3 #初始化影象通道 但是卷積深度由上一層決定
output_filters =[]#追蹤之前的層用來路由
#讀取bloks中的元素
for index, x in enumerate(blocks[1:]):
module = nn.Sequential()
#讀取convolutional塊中的資訊
if (x['type'] == 'convolutional'):
activation = x['activation']
try:
batch_normalize = int(x["batch_normalize"])
bias = False
except:
batch_normalize = 0
bias = True
filters = int(x["filters"]) #卷積核數量(維度)
padding = int(x["pad"]) #邊框填補
kernel_size = int(x["size"]) #卷積核大小
stride = int(x["stride"]) #步長
if padding:
pad = (kernel_size - 1)//2
else:
pad = 0
###
conv = nn.Conv2d(prev_fileters,filters,kernel_size,
stride,pad,bias=bias)
module.add_module("conv_{0}".format(index),conv)
if batch_normalize:
bn = nn.BatchNorm2d(filters)
module.add_module("batch_norm_{0}".format(index),bn)
if activation == "leaky":
activn = nn.LeakyReLU(0.1,inplace=True)
module.add_module("leaky_{0}".format(index),activn)
###
#讀取上取樣塊
elif (x["type"] == "upsample"):
stride = int(x["stride"])
upsample = nn.Upsample(scale_factor=2, mode="nearest")
module.add_module("upsample_{}".format(index),upsample)
#讀取路由塊
elif (x["type"] == "route"):
x["layers"] = x["layers"].split(',')
start = int(x["layers"][0])
try:
end = int(x["layers"][1])
except:
end = 0
if start > 0:
start = start - index
if end > 0:
end = end - index
route = EmptyLayer()
module.add_module("route_{0}".format(index),route)
if end < 0:
filters = output_filters[index + start] + output_filters[index + end]
else:
filters = output_filters[index + start]
#讀取shortcut
elif x["type"] == "shortcut":
shortcut = EmptyLayer()
module.add_module("shortcut_{}".format(index),shortcut)
#讀取yolo
elif x["type"] == "yolo":
mask = x["mask"].split(",")
mask = [int(x) for x in mask]
#讀取anchor的尺寸
anchors = x["anchors"].split(",")
anchors = [int(a) for a in anchors]
anchors = [(anchors[i], anchors[i+1]) for i in range(0, len(anchors),2)]
anchors = [anchors[i] for i in mask]
detection = DetectionLayer(anchors)
module.add_module("Detection_{}".format(index),detection)
module_list.append(module)
prev_fileters = filters
output_filters.append(filters)
return (net_info, module_list)
blocks = parse_cfg("cfg/yolov3.cfg")
print(create_modules(blocks))輸出:

其中,需在此之前定義兩個繼承nn.Module的類
class EmptyLayer(nn.Module):
def __init__(self):
super(EmptyLayer,self).__init__()
class DetectionLayer(nn.Module):
def __init__(self, anchors):
super(DetectionLayer, self).__init__()
self.anchors = anchors
前向傳播
下一節介紹 然後根據讀取的網路資訊 定義一個前向傳播
首先定義一個nn.Module的類 Darknet,獲取blocks 和 module_list
class Darknet(nn.Module):
def __init__(self, cfgfile):
super(Darknet, self).__init__()
self.blocks = parse_cfg(cfgfile)
self.net_info, self.module_list = create_modules(self.blocks)然後定義向前傳播
def forward(self, x, CUDA=False):
modules = self.blocks[1:]
outputs = {}
'''
write flag 表示我們是否遇到第一個檢測。如果 write 是 0,則收集器尚未初始化。
如果 write 是 1,則收集器已經初始化,我們只需要將檢測圖與收集器級聯起來即可。
'''
write = 0
#按順序讀modules 不同的層執行不同的操作
for i, module in enumerate(modules):
module_type = (module["type"])
if module_type == "convolutional" or module_type == "upsample":
x = self.module_list[i](x)
elif module_type == "route":
layers = module["layers"]
layers = [int(a) for a in layers]
if (layers[0]) > 0:
layers[0] = layers[0] - i
if len(layers) == 1:
x = outputs[i + (layers[0])]
else:
if (layers[1]) > 0:
layers[1] = layers[1] - i
map1 = outputs[i + layers[0]]
map2 = outputs[i + layers[1]]
x = t.cat((map1, map2), 1) #兩個張量(tensor)拼接在一起
elif module_type == "shortcut":
from_ = int(module["from"])
x = outputs[i-1] + outputs[i+from_]
#現在可以將三個不同尺度的檢測圖級聯成一個大的張量
elif module_type == "yolo":
anchors = self.module_list[i][0].anchors
inp_dim = int (self.net_info["height"])
num_classer = int (module["classes"])
x = x.data
x = predict_transform(x, inp_dim, anchors,
num_classer,CUDA)
if not write:
detections = x
write = 1
else:
detections = t.cat((detections, x), 1)
outputs[i] = x
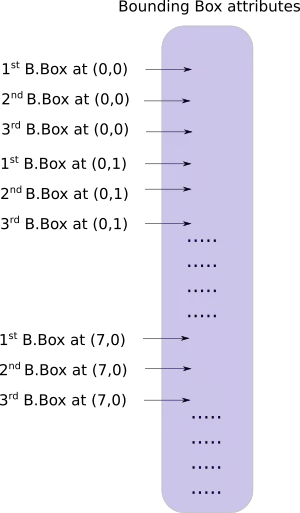
return detectionsYOLO 的輸出是一個卷積特徵圖,包含沿特徵圖深度的邊界框屬性。邊界框屬性由彼此堆疊的單元格預測得出。因此,如果你需要在 (5,6) 處訪問單元格的第二個邊框,那麼你需要通過 map[5,6, (5+C): 2*(5+C)] 將其編入索引。這種格式對於輸出處理過程(例如通過目標置信度進行閾值處理、新增對中心的網格偏移、應用錨點等)很不方便。
另一個問題是由於檢測是在三個尺度上進行的,預測圖的維度將是不同的。雖然三個特徵圖的維度不同,但對它們執行的輸出處理過程是相似的。如果能在單個張量而不是三個單獨張量上執行這些運算,就太好了。
為了解決這些問題,我們引入了函式 predict_transform 在utils.py檔案中
def predict_transform(prediction, inp_dim, anchors, num_classes, CUDA = True):
batch_size = prediction.size(0)
stride = inp_dim // prediction.size(2)
grid_size = inp_dim // stride
bbox_attrs = 5 + num_classes
num_anchors = len(anchors)
prediction = prediction.view(batch_size, bbox_attrs*num_anchors, grid_size*grid_size)
prediction = prediction.transpose(1,2).contiguous()
prediction = prediction.view(batch_size, grid_size*grid_size*num_anchors, bbox_attrs)
anchors = [(a[0]/stride, a[1]/stride) for a in anchors]
#Sigmoid the centre_X, centre_Y. and object confidencce
prediction[:,:,0] = torch.sigmoid(prediction[:,:,0])
prediction[:,:,1] = torch.sigmoid(prediction[:,:,1])
prediction[:,:,4] = torch.sigmoid(prediction[:,:,4])
#Add the center offsets
grid = np.arange(grid_size)
a,b = np.meshgrid(grid, grid)
x_offset = torch.FloatTensor(a).view(-1,1)
y_offset = torch.FloatTensor(b).view(-1,1)
if CUDA:
x_offset = x_offset.cuda()
y_offset = y_offset.cuda()
x_y_offset = torch.cat((x_offset, y_offset), 1).repeat(1,num_anchors).view(-1,2).unsqueeze(0)
prediction[:,:,:2] += x_y_offset
#log space transform height and the width
anchors = torch.FloatTensor(anchors)
if CUDA:
anchors = anchors.cuda()
anchors = anchors.repeat(grid_size*grid_size, 1).unsqueeze(0)
prediction[:,:,2:4] = torch.exp(prediction[:,:,2:4])*anchors
prediction[:,:,5: 5 + num_classes] = torch.sigmoid((prediction[:,:, 5 : 5 + num_classes]))
prediction[:,:,:4] *= stride
return predictionpredict_transform 函式把檢測特徵圖轉換成二維張量,張量的每一行對應邊界框的屬性,如下所示:
現在,在 darknet.py 檔案的頂部定義以下函式
def get_test_input():
img = cv2.imread("dog-cycle-car.png")
img = cv2.resize(img, (416,416)) #Resize to the input dimension
img_ = img[:,:,::-1].transpose((2,0,1)) # BGR -> RGB | H X W C -> C X H X W
img_ = img_[np.newaxis,:,:,:]/255.0 #Add a channel at 0 (for batch) | Normalise
img_ = t.from_numpy(img_).float() #Convert to float
img_ = Variable(img_) # Convert to Variable
return img_測試程式碼
model = Darknet("cfg/yolov3.cfg")
inp = get_test_input()
pred = model(inp)
print (pred)輸出

下載預訓練權重
https://pjreddie.com/media/files/yolov3.weights
讀取權重
def load_weights(self, weightfile):
fp = open(weightfile, "rb")
header = np.fromfile(fp, dtype = np.int32, count = 5)
self.header = t.from_numpy(header)
self.seen = self.header[3]
weights = np.fromfile(fp, dtype=np.float32)
ptr = 0
for i in range(len(self.module_list)):
module_type = self.blocks[i+1]["type"]
if module_type == "convolutional":
module = self.module_list[i]
try:
batch_normalize = int(self.blocks[i+1]["batch_normalize"])
except:
batch_normalize = 0
conv = module[0]
if (batch_normalize):
bn = module[1]
num_bn_biases = bn.bias.numel()
bn_biases = t.from_numpy(weights[ptr:ptr + num_bn_biases])
ptr += num_bn_biases
bn_weights = t.from_numpy(weights[ptr: ptr + num_bn_biases])
ptr += num_bn_biases
bn_running_mean = t.from_numpy(weights[ptr: ptr + num_bn_biases])
ptr += num_bn_biases
bn_running_var = t.from_numpy(weights[ptr: ptr + num_bn_biases])
ptr += num_bn_biases
#Cast the loaded weights into dims of model weights.
bn_biases = bn_biases.view_as(bn.bias.data)
bn_weights = bn_weights.view_as(bn.weight.data)
bn_running_mean = bn_running_mean.view_as(bn.running_mean)
bn_running_var = bn_running_var.view_as(bn.running_var)
#Copy the data to model
bn.bias.data.copy_(bn_biases)
bn.weight.data.copy_(bn_weights)
bn.running_mean.copy_(bn_running_mean)
bn.running_var.copy_(bn_running_var)
else:
#Number of biases
num_biases = conv.bias.numel()
#Load the weights
conv_biases = t.from_numpy(weights[ptr: ptr + num_biases])
ptr = ptr + num_biases
#reshape the loaded weights according to the dims of the model weights
conv_biases = conv_biases.view_as(conv.bias.data)
#Finally copy the data
conv.bias.data.copy_(conv_biases)
#Let us load the weights for the Convolutional layers
num_weights = conv.weight.numel()
#Do the same as above for weights
conv_weights = t.from_numpy(weights[ptr:ptr+num_weights])
ptr = ptr + num_weights
conv_weights = conv_weights.view_as(conv.weight.data)
conv.weight.data.copy_(conv_weights)測試:
model = Darknet("cfg/yolov3.cfg")
model.load_weights("yolov3.weights")
inp = get_test_input()
pred = model(inp)
print (pred)通過模型構建和權重載入,就可以開始進行目標檢測了
下一章介紹如何利用 objectness 置信度閾值和非極大值抑制生成最終的檢測結果。