
機器人作業系統ROS
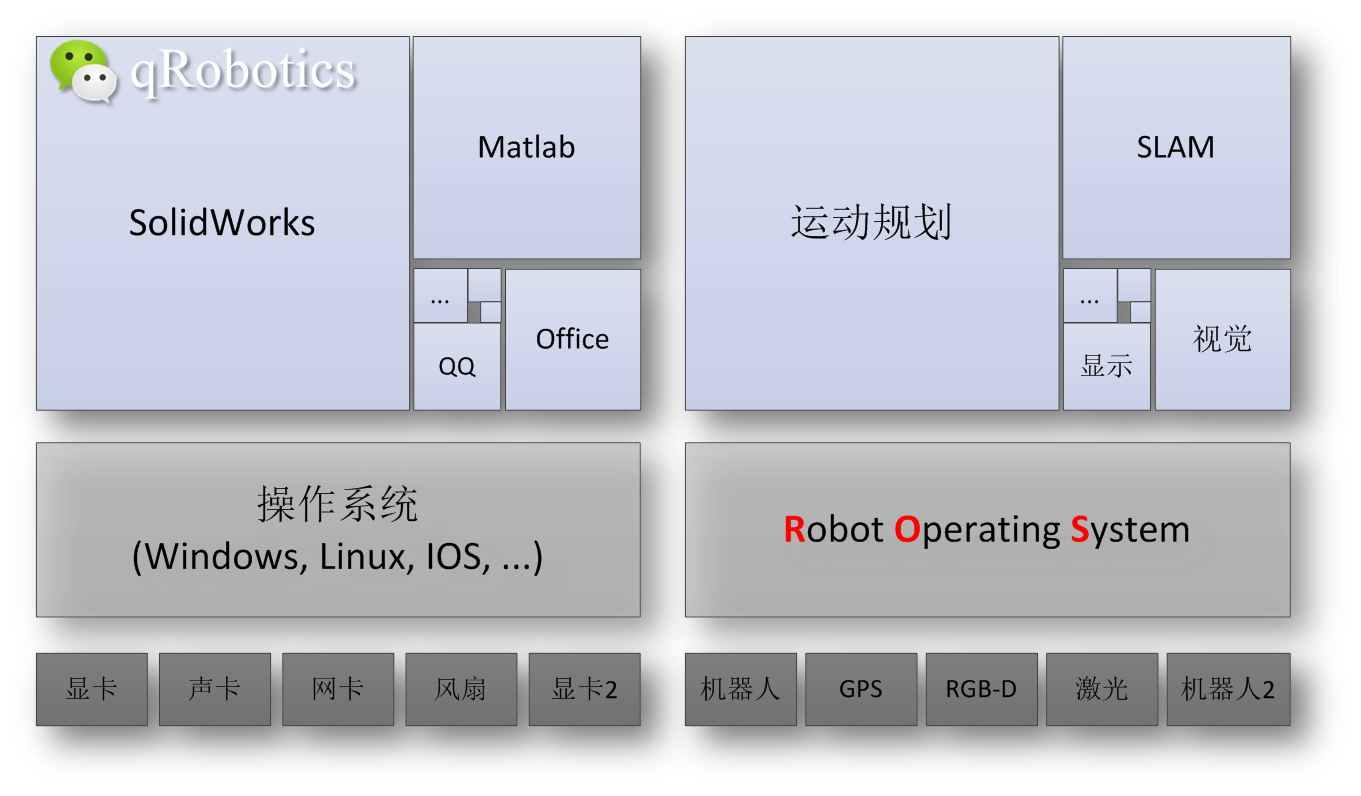
ROS(機器人作業系統,Robot Operating System),是專為機器人軟體開發所設計出來的一套電腦作業系統架構。它是一個開源的元級作業系統(後作業系統),提供類似於作業系統的服務,包括硬體抽象描述、底層驅動程式管理、共用功能的執行、程式間訊息傳遞、程式發行包管理,它也提供一些工具和庫用於獲取、建立、編寫和執行多機融合的程式。
與計算機作業系統對比:
核心ROS教程:http://wiki.ros.org/cn/ROS/Tutorials
挖個坑
相關推薦
為什麼推薦使用Ubuntu 18.04 LTS學習機器人作業系統ROS 1和2
因為: Canonical將Ubuntu 18.04 LTS Linux支援擴充套件到10年 這是第一次LTS的支援長達10年!!! 非常有助於解決版本過多,迭代過快等現象。 並且, Ubuntu 18.04 可以非常方便安裝 ROS 1和2,教程和案例都已經非常豐富了。 但
在Windows10安裝和使用機器人作業系統ROS補充說明
在Ubuntu 18.04的安裝和使用說明,請參考專欄:U_ROS_M1;U_ROS_B2。 在Mac OS X的安裝和使用,請參考:X_ROS1;X_ROS2。 在Windows/Linux/MacOSX都支援原始碼編譯和二進位制功能包兩種安裝方式。 在之後教程和
機器人作業系統ROS
ROS(機器人作業系統,Robot Operating System),是專為機器人軟體開發所設計出來的一套電腦作業系統架構。它是一個開源的元級作業系統(後作業系統),提供類似於作業系統的服務,包括硬體抽象描述、底層驅動程式管理、共用功能的執行、程式間訊息傳遞、程式發行包管理,它也提供一些工具和庫用
機器人作業系統ROS Indigo 入門學習(6)——理解ROS Nodes
1.理解ROS Node 這個教程將會介紹ROS圖的概念並且會討論roscoe,rosnode,和rosrun命令列工具。 1.1前提 在這個教程中我們會用到小型模擬器,請安裝: $ sudo apt-get install ros-<distro>-ro
機器人作業系統ROS(indigo)與三維模擬軟體V-Rep(3.2.1)通訊介面使用筆記
通過網頁快速瞭解Linux(Ubuntu)和ROS機器人作業系統,請參考實驗樓線上系統如下:關鍵字:ROS(indigo),V-Rep(3.2.1), vrep_ros_bridge(lagadic).vrep_ros_bridge提供了V-Rep和ROS之間的通訊介面,可以
機器人作業系統ROS教程(三) ROS新手教程
前面我們介紹了ROS的特點和結構,接下來就要開始準備動手感受一下ROS的強大了。ROS官網的wiki上針對 新手的教程很詳細,最好把所有的新手教程都搞清楚,這是後面開發最基礎的東西。儘管如此,ROS對於新手 來說還是很難上手,這裡,我就來總結一下我當時學習的歷程,也為其他新
機器學習、深度學習和機器人作業系統ROS實踐以及無人駕駛SLAM教程
在網上找了好幾天,終於蒐集全了有關機器學習、深度學習、機器人作業系統ROS以及SLAM相關的無人駕駛技術的相關教程相信一定非常有用,在這裡先Mark一下哈哈,我自己總結的學習路線: 機器人作業系統ROS實踐------>SLAM無人駕駛------>機器學習和深度
在Windows系統安裝ROS機器人作業系統
具體資源英文連結參考:微軟Windows作業系統全面相容機器人作業系統ROS1和ROS2 中文具體資源參考:https://blog.csdn.net/ZhangRelay/article/details/82928141 目前,ROS1和ROS2,已經基本實現了全平臺支援(Window
機器人作業系統(ROS)淺析(肖軍浩 博士 譯) 學習筆記二(第六章到第十章)
第 6 章 啟動檔案 利用啟動檔案一次性配置和執行多個節點 。 roslaunch :這是一個自適應工具,如果啟動多節點時沒有節點管理器執行,它會自動啟動節點管理器;如果已經有一個節點 管理器在執行,則會使用已有的。 利用啟動檔案一次性配
機器人作業系統(ROS)淺析(肖軍浩 博士 譯) 學習筆記一(第一章到第五章)
機器人作業系統(ROS)淺析(肖軍浩 博士 譯) 學習筆記 第一章: 第 1 章 緒論 1.1 選擇 ROS 的理由 分散式計算 現代機器人系統往往需要多個計算機同時執行多個 程序,例如: (1)一些機器人搭載多臺計算機,每臺計算機用於控制機器人的 部分驅動器或感測器
【ROS】關於MOOC中《機器人作業系統入門》中可能遇到的問題解決方案
1、安裝ROS過程中總是提示缺少某個模組,比如說re模組: 檢查你的計算機是否安裝了pyhton3, 如果是的話把.bashrc檔案中的python3註釋掉,應該就能解決問題 2、在rviz中無法看到laserscan的影象: 首先用topic list檢查是否已經啟動了所有需要的topic,
ROS機器人作業系統 基礎知識 節點 話題 訊息 服務 行動 引數 日誌 TF變換 目標結構 啟動檔案
ROS機器人作業系統 基礎知識 節點 話題 訊息 服務 行動 引數 日誌 TF變換 目標結構 啟動檔案 1. 安裝 官方安裝指北 博文github a 新增 sources.list sudo sh -c 'echo "deb http://package
一篇預定未達標的Chat(沉迷機器人作業系統(ROS)的一個理由和四種修仙祕籍)
這是第一次寫Chat,未達標也是情理之中的事兒,自己還需多多努力才行! 定價1.98元,人數設定100,即便達標,其實也毫無收益啊,在此非常感謝GitChat的推廣和CSDN的信任。 這篇Chat初稿寫了半年,是我三年機器人教學的總結,也許如我這般卑微之人,總結似乎毫無意
ROS 2 Crystal Clemmys版機器人作業系統安裝說明
對於有ROS使用經驗的開發者而言,非常簡單,並且能和ROS 1 Melodic、ROS 2 Bouncy共存(更新source bash,選擇使用版本即可)。 支援系統windows、linux和mac os,愉快玩耍! 安裝具體過程如下: [email prot
ROS機器人作業系統資料與資訊(2018年12月)
要聞一覽: ROS 2新版 開源機器人論文集徵稿 機器人導航新功能 適用18.04+16.04的ROS QT 4.8 行為樹 釋出ROS版本號命名 Existing ROS 2 names and codenames: Ardent Apa
Ubuntu16.04安裝ROS(機器人作業系統)教程
“在人生的路上,每一個人都是孤獨的旅客。與其舒舒服服,懵懵懂懂過一輩子,倒不如品嚐一點不平常的滋味,似苦而是甜。” 還是記錄下吧~ 最近腦子總是不好使~ ROS(Robot OS 機器人作業系統) 官網:http://wiki.ros.org/RO
ROS新手教程【一】ROS開源機器人作業系統簡介
大多數已經存在的機器人軟體工程都包含了可以在工程外重複使用的驅動和演算法,不幸的是,由於多方面的原因,大部分程式碼的中間層都過於混亂,以至於很困難提取出它的功能,也很難把它們從原型中提取出來應用到其他方面。為了應對這種趨勢,我們鼓勵將所有的驅動和演算法逐漸發展成為和ROS沒有依賴性單獨的庫。RO
ROS機器人作業系統的安裝 配置與初級教程 1
分享一下我老師大神的人工智慧教程!零基礎,通俗易懂!http://blog.csdn.net/jiangjunshow 也歡迎大家轉載本篇文章。分享知識,造福人民,實現我們中華民族偉大復興!
ROS(1和2)機器人作業系統相關書籍、資料和學習路徑
ROS機器人相關書籍與資料(更新日期2017年11月)之前寫過一篇博文總結過相關書籍(流行版本和相關書籍彙總),但是並沒有具體介紹。學習ROS基礎知識以官網和書籍為主,如果需要了解ROS最新成果和進展,以論文和會議資料為主。使用ROS進行機器人設計與開發,那就需要在掌握機器人
ROS機器人作業系統線上練習
通過網頁快速瞭解Linux(Ubuntu)和ROS機器人作業系統,請參考實驗樓線上系統如下:廢話不說,先看圖吧:1. ROS in 5 DaysEntering ROS2. ROS Navigation