
機器人作業系統ROS(indigo)與三維模擬軟體V-Rep(3.2.1)通訊介面使用筆記
通過網頁快速瞭解Linux(Ubuntu)和ROS機器人作業系統,請參考實驗樓線上系統如下:
關鍵字:ROS(indigo),V-Rep(3.2.1), vrep_ros_bridge(lagadic).
vrep_ros_bridge提供了V-Rep和ROS之間的通訊介面,可以實現使用ROS訊息和服務控制V-Rep模擬的功能。
安裝說明:注意:所以安裝測試均在ubuntu 14.04 LTS下進行
1. 進入到通過終端進入到catkin_ws/src目錄下
使用GIT下載:
git clone https://github.com/lagadic/vrep_ros_bridge.git
2. 檢測版本號:
git checkout indigo-devel
3. 新開啟一個終端:
gedit ~/.bashrc
4. 在末尾加上:
export VREP_ROOT_DIR=/ChangeWithyourPathToVrep/
export ROS_PACKAGE_PATH=${ROS_PACKAGE_PATH}:/path_to_catkin_ws/catkin_ws/src
source /opt/ros/indigo/setup.bash
source /path_to_catkin_ws/catkin_ws/devel/setup.bash
其中:/ChangeWithyourPathToVrep/以及/path_to_catkin_ws/分別為代指,請根據實際安裝目錄調整。
5. 回到catkin_workspace並且執行:
catkin_make
catkin_make --pkg vrep_ros_bridge --cmake-args -DCMAKE_BUILD_TYPE=RelWithDebInfo
如果成功,可以在catkin_ws/devel/lib/下發現libv_repExtRosBridge.so, libcamera_handler.so, libmanipulator_handler.so, libquadrotor_handler.so, librigid_body_handler.so
6. 使用終端到V-Rep安裝目錄下,並輸入:
ln -s /YOUR_CATKIN_WS_PATH/devel/lib/libv_repExtRosBridge.so
其中: /YOUR_CATKIN_WS_PATH為代指,請根據實際安裝目錄調整。
安裝測試:
1. 在終端輸入:
roscore
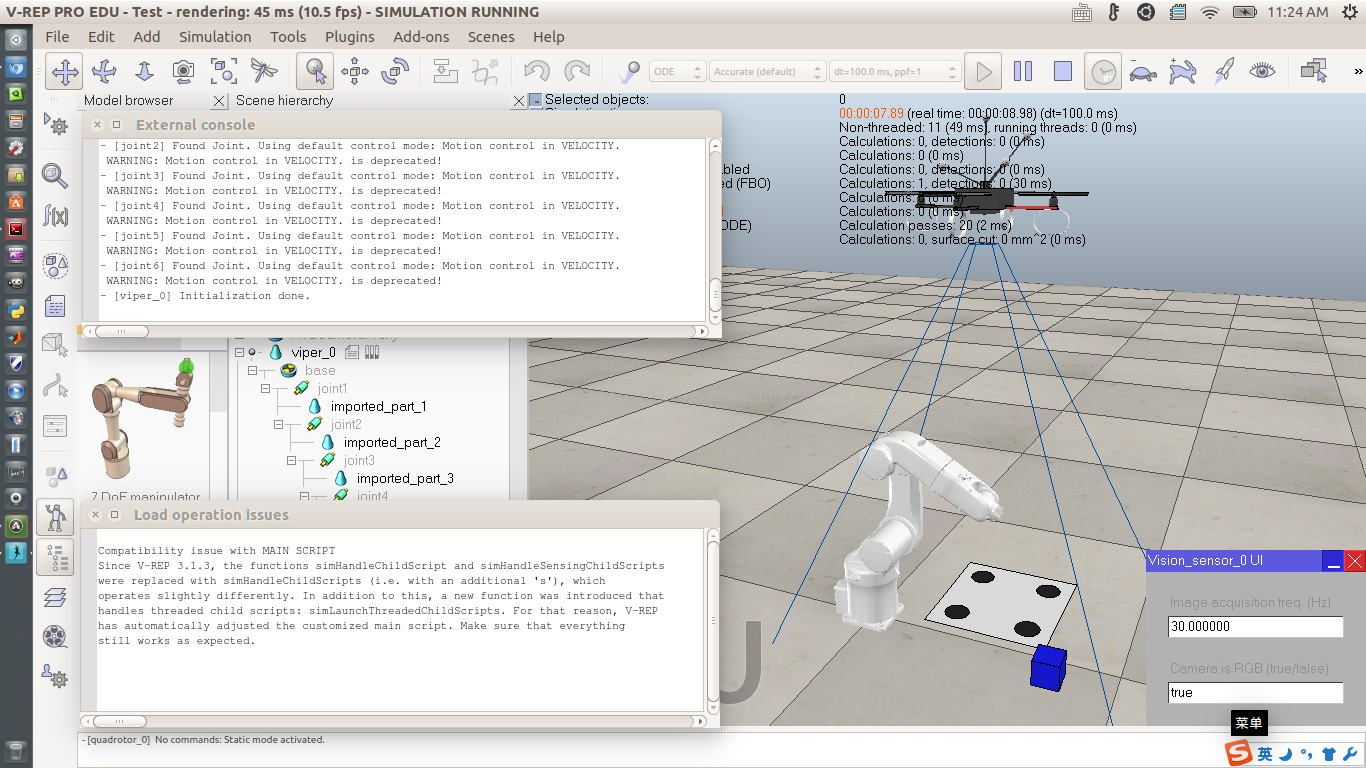
2. 在終端啟動V-Rep:
./vrep.sh
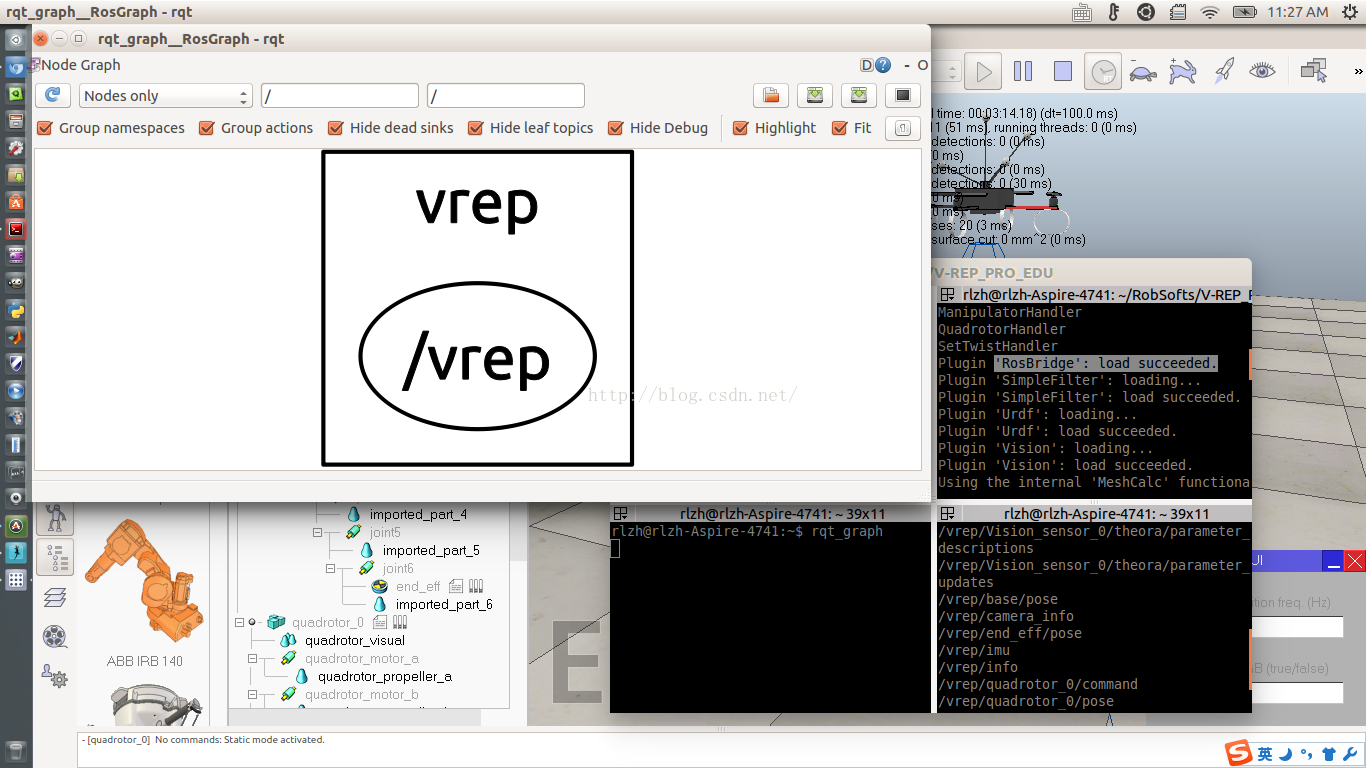
3. 測試ROS一些功能:
rqt_graph以及 rostopic list 等。
http://v.youku.com/v_show/id_XMTM2ODg5MDY5Ng
參考文獻彙總:
1.ROS
http://wiki.ros.org/cn
2.V-Rep
http://www.coppeliarobotics.com/resources.html
3.vrep_ros_bridge
https://github.com/lagadic/vrep_ros_bridge
http://wiki.ros.org/vrep_ros_bridge