ROS機器人作業系統線上練習
阿新 • • 發佈:2019-01-17
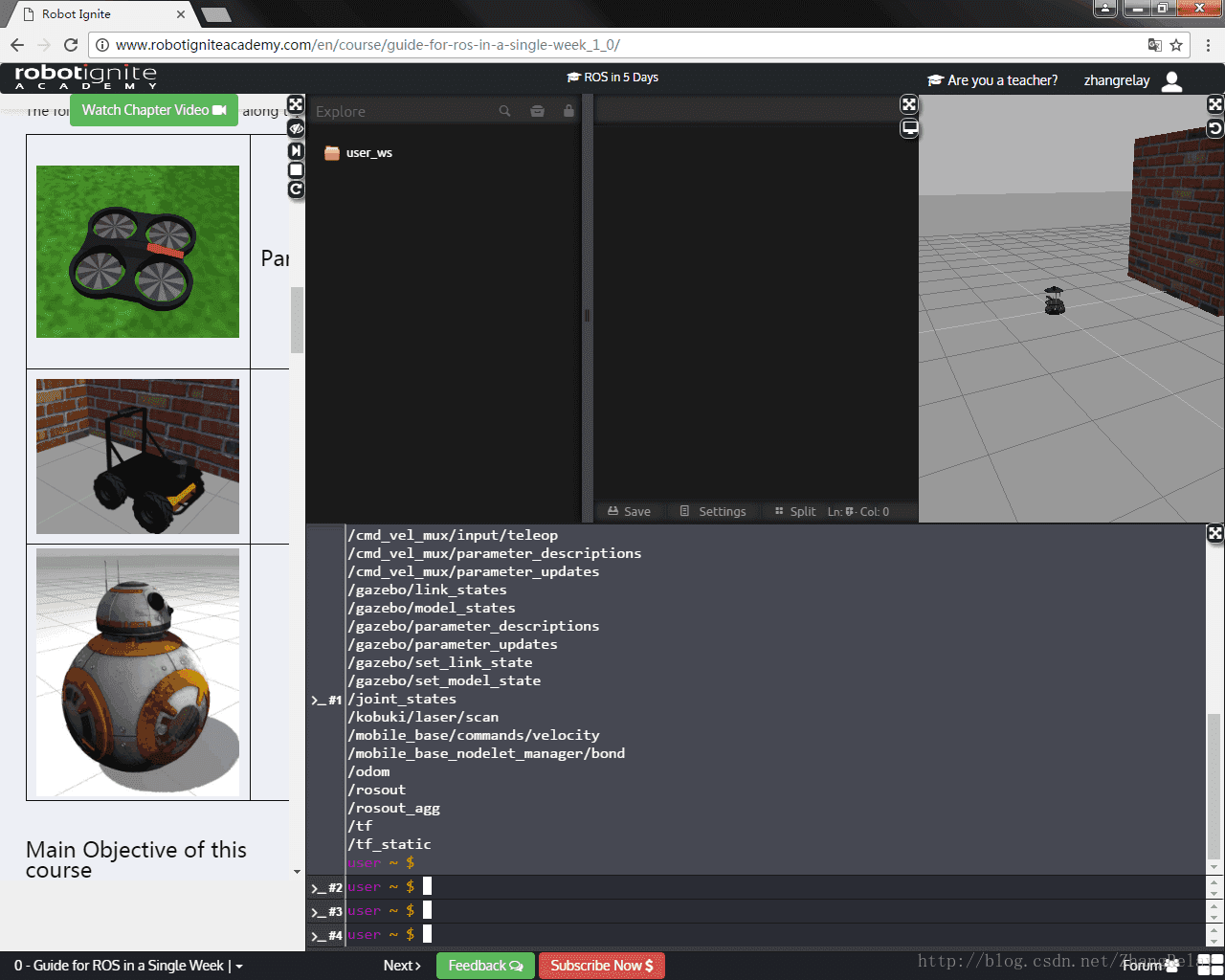
通過網頁快速瞭解Linux(Ubuntu)和ROS機器人作業系統,請參考實驗樓線上系統如下:
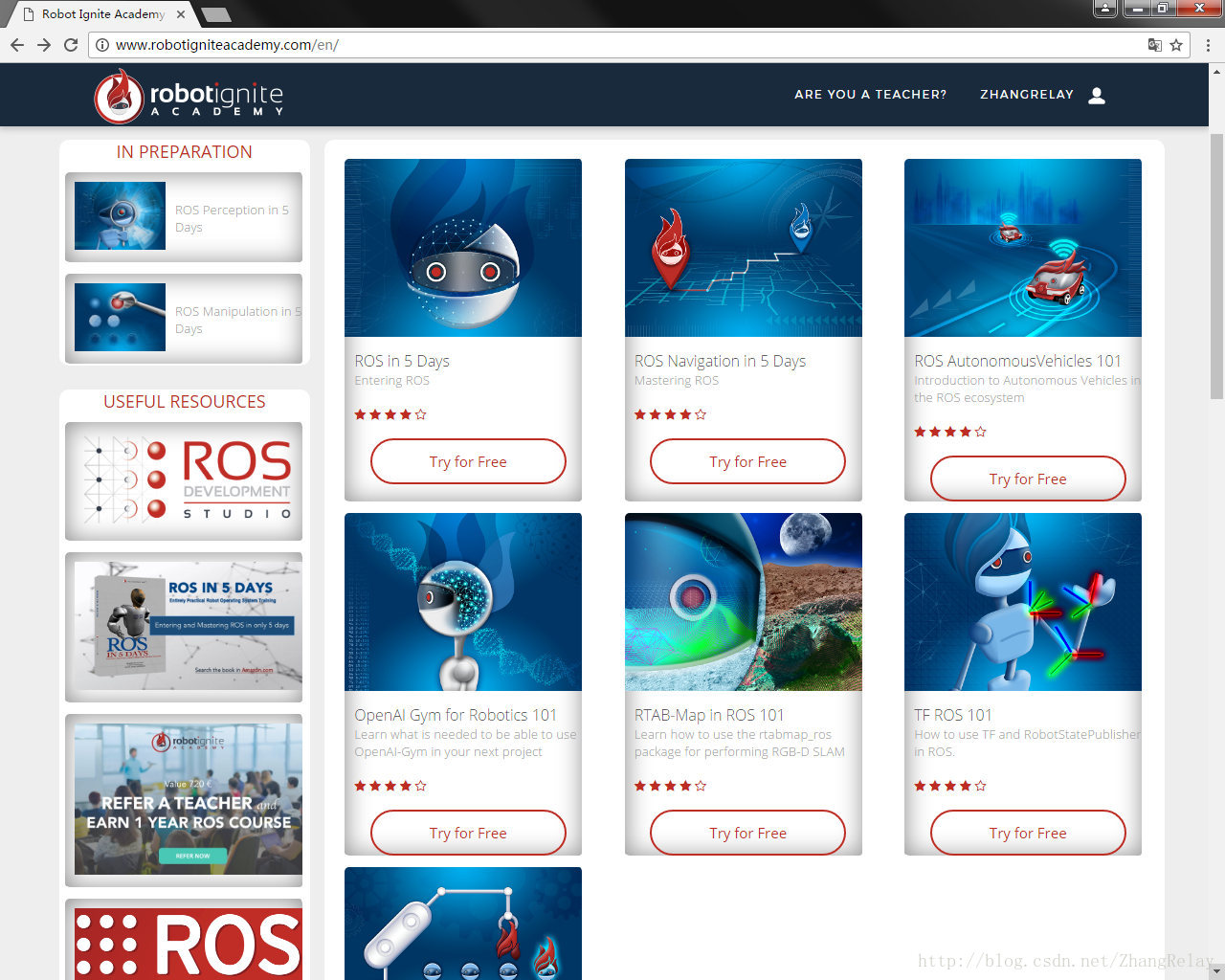
廢話不說,先看圖吧:
1. ROS in 5 Days
Entering ROS
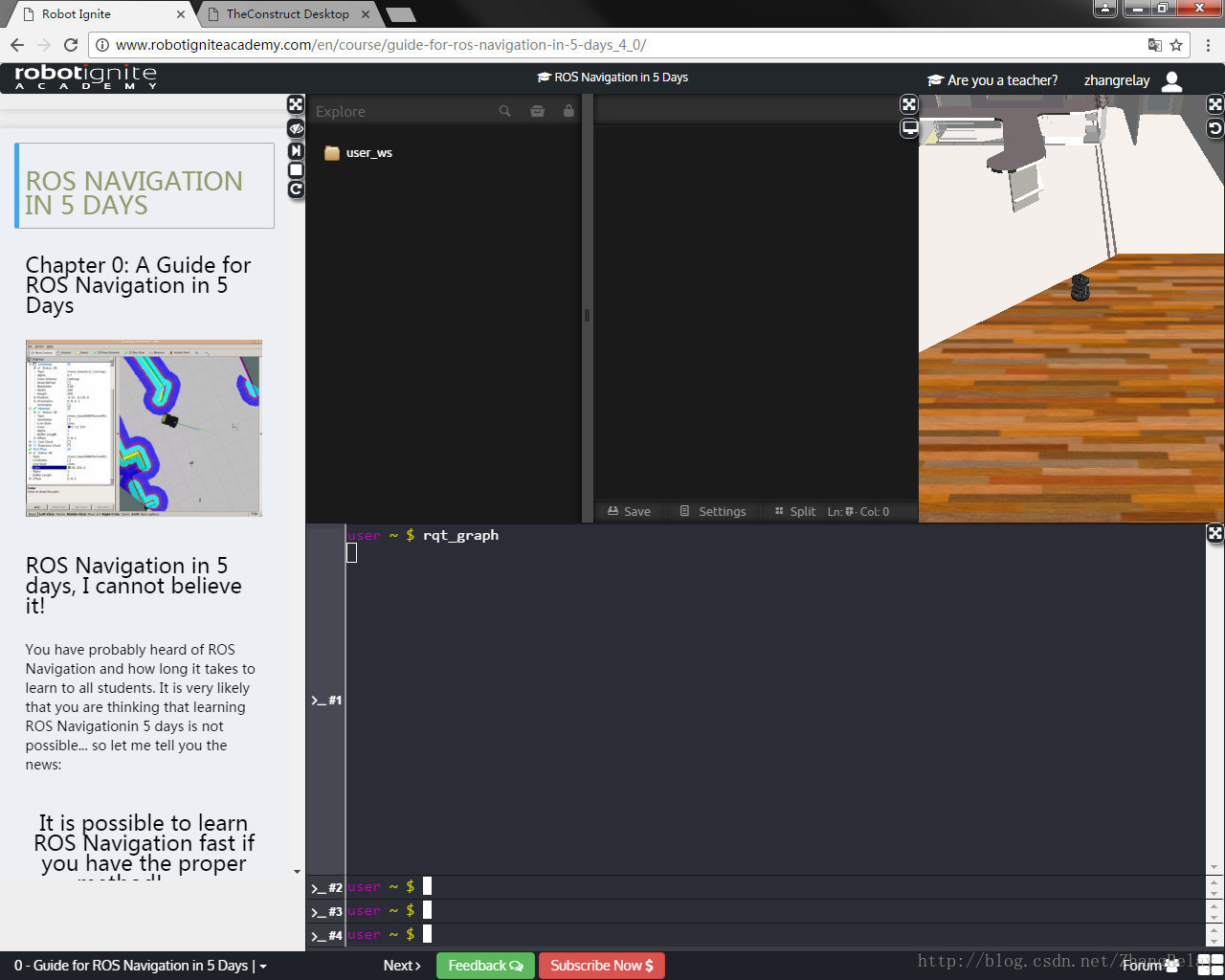
2. ROS Navigation in 5 Days
Mastering ROS


3. ROS AutonomousVehicles 101
Introduction to Autonomous Vehicles in the ROS ecosystem

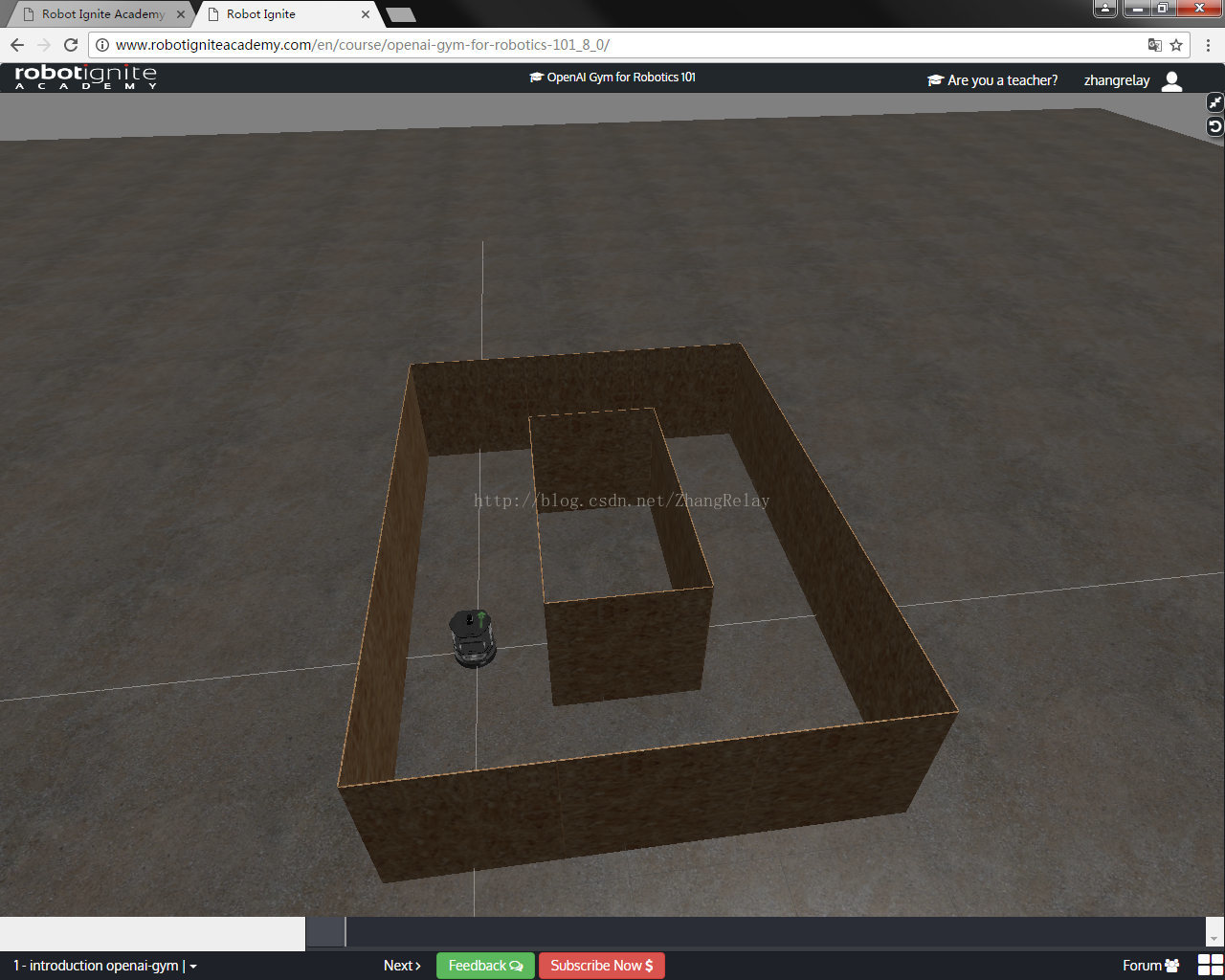
4. OpenAI Gym for Robotics 101
Learn what is needed to be able to use OpenAI-Gym in your next project
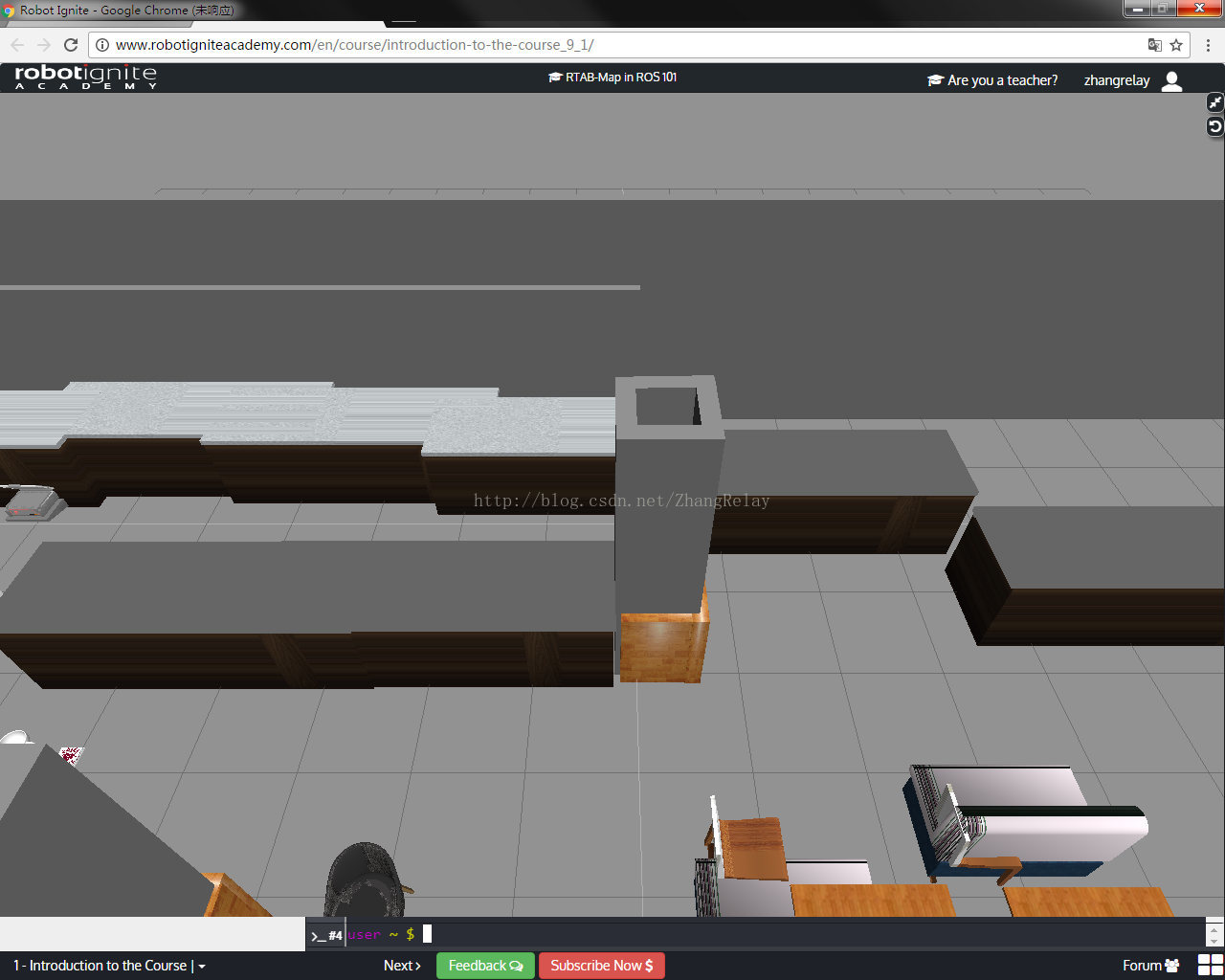
5. RTAB-Map in ROS 101
Learn how to use the rtabmap_ros package for performing RGB-D SLAM
6. TF ROS 101
How to use TF and RobotStatePublisher in ROS.
7. ROS-Industrial 101
Introduction to some basic tools for start working with ROS-Industrial
有興趣可以在嘗試一下,體驗還不錯的~~~~