
Cesium中的相機—YawPitchRoll
原博文地址:https://blog.csdn.net/u011575168/article/details/83097894
以正前方為X軸,以左手座標系建立O_XYZ座標系。Yaw、Pitch、Roll建立座標系,從基準正前方出發,相機以向上和向右旋轉為正。
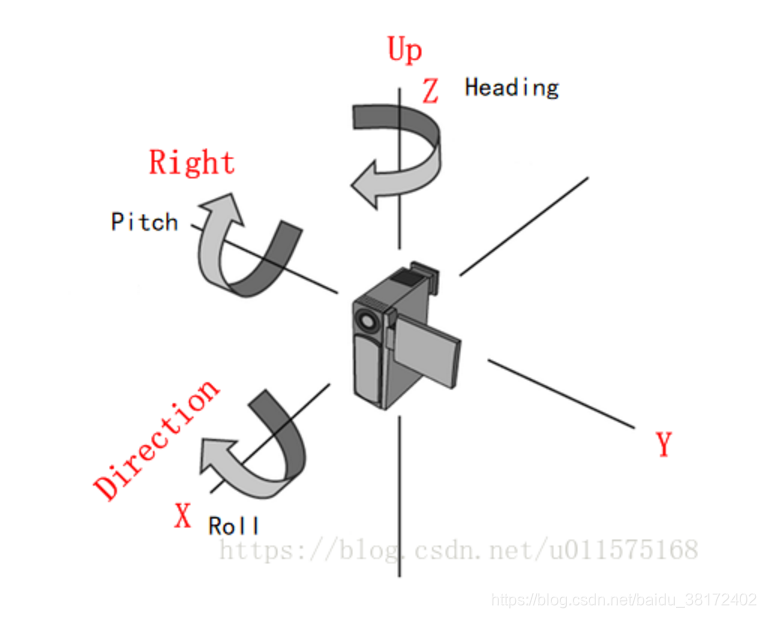
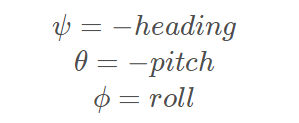
由於求取旋轉矩陣是,座標軸之間的旋轉都是以逆時針進行的,所以實際角度有如下關係:
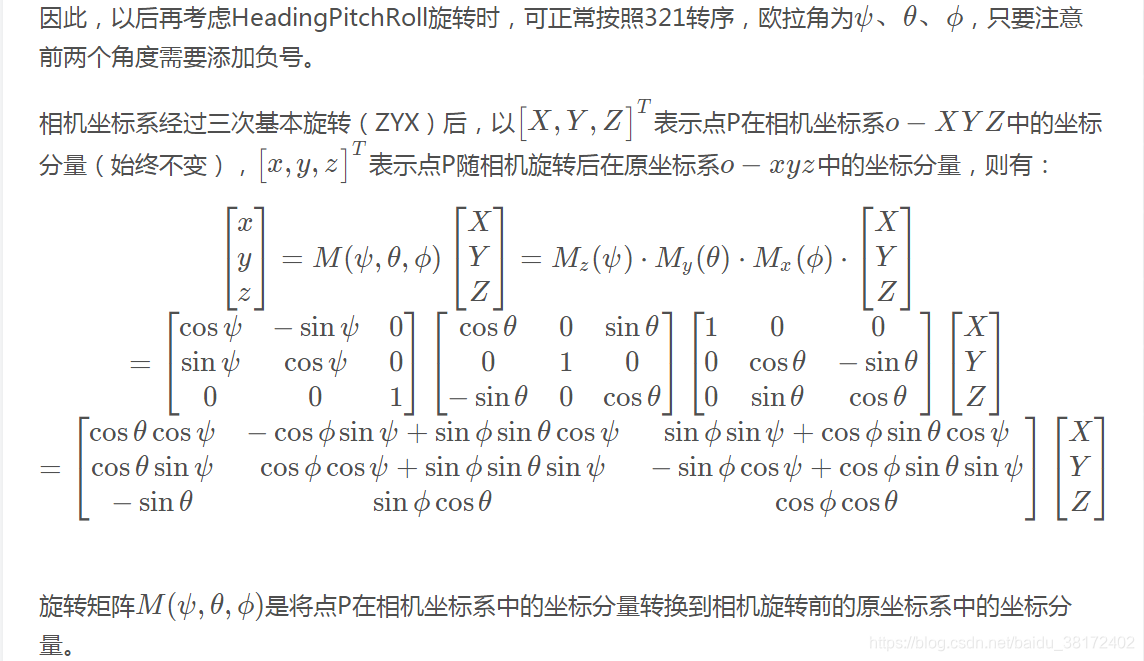
旋轉矩陣表示:
相關推薦
Cesium中的相機—YawPitchRoll
原博文地址:https://blog.csdn.net/u011575168/article/details/83097894 以正前方為X軸,以左手座標系建立O_XYZ座標系。Yaw、Pitch、Roll建立座標系,從基準正前方出發,相機以向上和向右旋轉為正。 由於求取旋轉矩
Cesium中的相機—方向餘弦陣
前面在討論兩個不同座標系之間的轉換時都是通過尤拉旋轉或者四元素來定義的。今天直接給出方向餘弦陣的定義和用途。 方向餘弦的定義 方向餘弦是指在解析幾何裡,一個向量的三個方向餘弦分別是這向量與三個座標軸之間的角度的餘弦。 如下圖中,向量A與座標系三個軸i,j,ki,
視覺SLAM中相機詳解
目的 攝像頭 像素 一定的 原理 接收 計算 傳感 span 視覺SLAM中,通常是指使用相機來解決定位和建圖問題。 SLAM中使用的相機往往更加簡單,不攜帶昂貴的鏡頭,以一定的速率拍攝周圍的環境,形成一個連續的視頻流。 相機分類: 單目相機:只是用一個攝像頭進行SLAM的
Cesium中的幾種座標和相互轉換
轉載:https://blog.csdn.net/qq_34149805/article/details/78393540 幾個重要的座標物件: 1.世界座標 Cartesian3:笛卡爾空間直角座標系 1 new Cesium.
Cesium中對geojson的處理
最近關注到cesium對json處理,有點小收穫,記錄下來,有不對的請指正。 Cesium讀取geojson cesium支援topojson,GEOjson和普通的json格式,方法可以共用 一.topojson <body> <div id="cesiu
cesium中定位方法使用
cesium中定位到位置 在cesium中viewer.flyTo和Camera.flyTo的區別挺大,我們通常會用camera來定位,但當需要加上一個傾斜角的時候,可能定位的結果就和預想的區別很大 需求:矩形的中心點位置(110.0,35.8)為想要定位的
Android中相機拍攝照片,以及相簿選擇圖片壓縮上傳(壓縮後儲存進SD中)(可用於修改頭像等)
這個功能借鑑了多個大神的,然後整合起來。 Android中相機拍攝照片,以及相簿選擇圖片壓縮上傳(壓縮後儲存進SD中)(可用 於修改頭像等) 第一步: privat
Cesium中的地形和座標轉換說明 Cesium基礎使用介紹
轉自miaosen原文 Cesium基礎使用介紹 1 Cesium中的地形 Cesium中的地形系統是一種由流式瓦片資料生成地形mesh的技術,厲害指出在於其可以自動模擬出地面、海洋的三維效果。建立地形圖層的方式如下: var terrainProvider = new Cesiu
Cesium中簡單的LOD動態載入大量三維模型
Cesium中提供了三維模型載入API,但是很顯然一般三維場景的模型成千上萬,如果單純採用預設的三維模型載入方案會出現瀏覽器吃不消致使崩潰或者高延遲低幀率等影響正常視覺化互動的問題。誠然官方團隊已經開始了一個號稱革新技術的3Dtiles的三維模型批量載入處理方案,但目前其一
cesium學習——cesium中的座標
一、座標展現形式 在cesium中,對於座標數值單位有三種:角度、弧度和座標值 1.角度 角度就是我們所熟悉的經緯度,對於地球的座標建立如下: 圖中以本初子午線作為x和z的面,建立了一個空間座標系。可知在緯度方向上,角1的範圍為-90~90,即南緯90°~
Android調用相機實現拍照並裁剪圖片,調用手機中的相冊圖片並裁剪圖片
!= findview create 圖片剪裁 顯示 parent 學會 true mfile 在 Android應用中,非常多時候我們須要實現上傳圖片,或者直接調用手機上的拍照功能拍照處理然後直接顯示並上傳功能,以下將講述調用相機拍照處理圖片然後顯示和調用手機相冊中的
iOS9中,swift判斷相機,相冊權限,選取圖片為頭像
返回 而已 頭像 iss 模式 會有 vid str 編輯模式 在iOS7以後要打開手機攝像頭或者相冊的話都需要權限,在iOS9中更是更新了相冊相關api的調用 首先新建一個swift工程,在SB中放上一個按鈕,並在viewController中拖出點擊事件 ok!按鈕和事
淺析車牌識別相機在智能稱重系統中的應用方案
情況 splay 實時 一個 兩種 nbsp 認識 什麽是 全自動 稱重系統是由稱重衍生出來的現代名詞,是軟件與硬件的結合體,目的是為了減少勞動力,提高管理效率。隨著煤炭,化工,混凝土等行業的計量業務需求不斷增加,新型的計量方式也越來越多,其中引入一個新的概念“
iOS9中,Swift判斷相機,相簿許可權,選取圖片為頭像
在iOS7以後要開啟手機攝像頭或者相簿的話都需要許可權,在iOS9中更是更新了相簿相關api的呼叫 首先新建一個swift工程,在SB中放上一個按鈕,並在viewController中拖出點選事件 ok!按鈕和事件設定好以後,我們來引入要用到的庫,判斷攝像頭許可權,需要引入AVFoundat
Cesium相機高度範圍限制設定
Cesium相機高度範圍限制設定 Cesium相機高度範圍限制設定 自己寫的高度範圍設定(很差勁,自己都看不下去,但是奉獻出來一起改進) 官方引數的方式設定(效果滿意我喜歡) Cesium相機高度範圍限制設定 最
相機標定中部分疑問和注意事項
相機標定基本知識 對於針孔攝像機模型,一幅檢視是通過透視變換將三維空間中的點投影到影象平面。投影公式如下: 或者 這裡(X, Y, Z)是一個點的世界座標,(u, v)是點投影在影象平面的座標,以畫素為單位。A被稱作攝像機矩陣,或者內參數矩陣。(cx, c
cesium(相機)
而且 enter height tin cart range setview ora 時間 本文示列 相機的幾種方式,及區別。 //創建viewer var viewer = new Cesium.Viewer(‘cesiumContainer‘); //第一種
Cesium入門12 - Camera Modes - 相機模式
Cesium入門12 - Camera Modes - 相機模式 Cesium中文網:http://cesiumcn.org/ | 國內快速訪問:http://cesium.coinidea.com/ 為了展現我們的無人機飛行,讓我們用相機模式進行實驗。我們將保持簡單的兩個基本的相機模式,使用者可以切換之
Cesium官方教程6--相機
相機(Camera) 相機控制了場景的觀察視角。有很多相機操控方法,比如旋轉、縮放、平移以及飛行定位。Cesium預設支援使用滑鼠和觸控事件控制相機。Cesium也提供了一套可程式設計的相機控制API。這篇教程就是介紹相機相關知識,以及API。 快速開始 開始示例。開啟Sandcastle的
U3D 編輯器中sceneview下相機操作相關
前幾天在專案中想要實現一個編輯器模式下的3D空間畫線功能,幾經周折,還是作廢。 原因有:相機空間到世界空間轉換問題對於Z值不清楚,U3D自定義座標軸控制問題,射線與平面求交點不對, 一個關鍵問題是:編輯器模式下的求螢幕空間到世界空間的射線使用的相機應該是編輯器檢視本身的相機,然而編輯器有2D,3D模式,有