SDM(supervised descent method)演算法
阿新 • • 發佈:2019-01-07
最近在研究人臉特徵點檢測,之前沒接觸過,有些論文雖然能看懂,但是細節的部分可能之前的論文都有提到過,就沒有再提。所以找了一篇稍微早一點的文章開始學習起來。
MATLAB版本的程式碼基本上都看懂了,不過作者可能之前做過ASM,程式碼中有一些方法沒有使用,或者使用了比較複雜的演算法,其實只使用了其中一小部分結果,看起來有點難。準備找時間自己實現一下,看了程式碼應該不算難(又立flag了,督促自己不要偷懶)。這裡先簡單的實現SDM演算法,不做人臉應用的程式碼。
簡單的說SDM演算法是牛頓法的一種改進,牛頓法在求解梯度的時候需要用到Hessian矩陣的逆以及Jacobian矩陣,在高維度的情況下這個計算量較大,而且有些情況下Hessian矩陣是不可逆的。這篇論文通過監督學習來學習Hessian矩陣的逆以及Jacobian矩陣的乘積,這樣就可以省去複雜的計算過程。
下面程式碼是SDM實現的例子,完成對曲線的擬合。擬合過程中會列印誤差值。R儲存了要學習的引數。steps是蒙特卡洛取樣的引數,取樣點間隔越小,擬合效果越好。
程式碼簡單的說就是在訓練過程中已知dx,dy,然後可以通過最小二乘訓練R,然後在Test過程中,已知dy可以通過R求解x的最優解。論文中提到了訓練引數R和b,應該可以合到一起,這裡只有引數R。
#coding:utf-8
import numpy as np
import math
import matplotlib.pyplot as plt
#取樣間距
steps = [0.25,0.025,0.0025,0.00025]
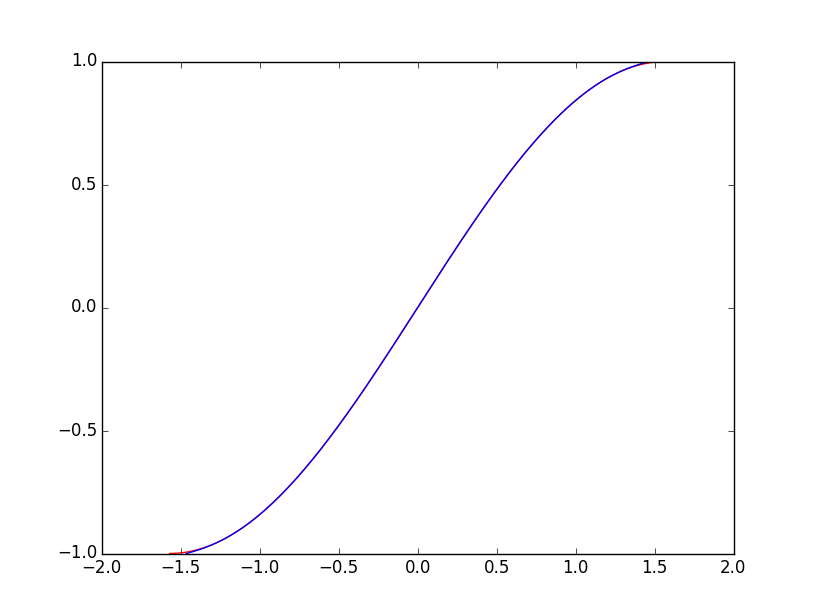
y = np.mat(np.arange(-1 下面是擬合的效果圖,紅色為真實曲線,藍色為訓練得到的曲線。