單應性變換(Homography)
阿新 • • 發佈:2019-01-08
概要:
單應性變換就是一個平面到另一個平面的對映關係。
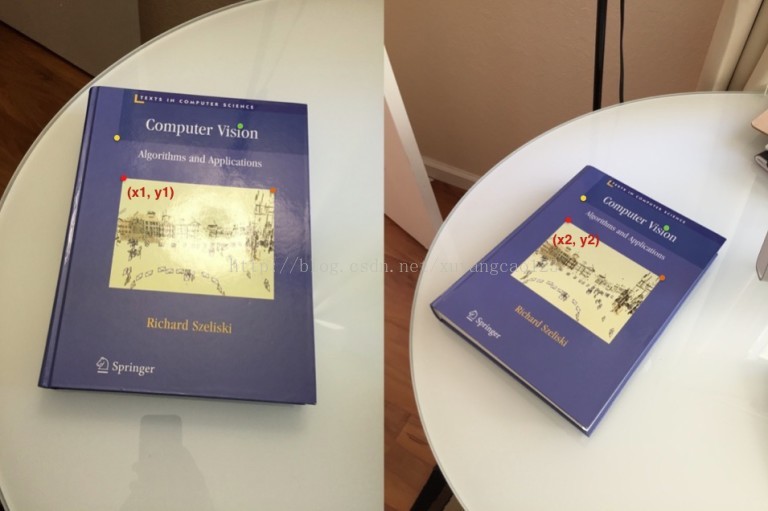
如圖,兩張圖片中相同顏色的點叫做corresponding Points,比如兩個紅點就是一對corresponding points。單應性矩陣(Homography)就是一個從一張影象到另一張影象對映關係的轉換矩陣(3*3)。可以由下面的公式來表示:

以影象中的紅點為例,可以將單應性變換寫成如下形式:

Python實現:
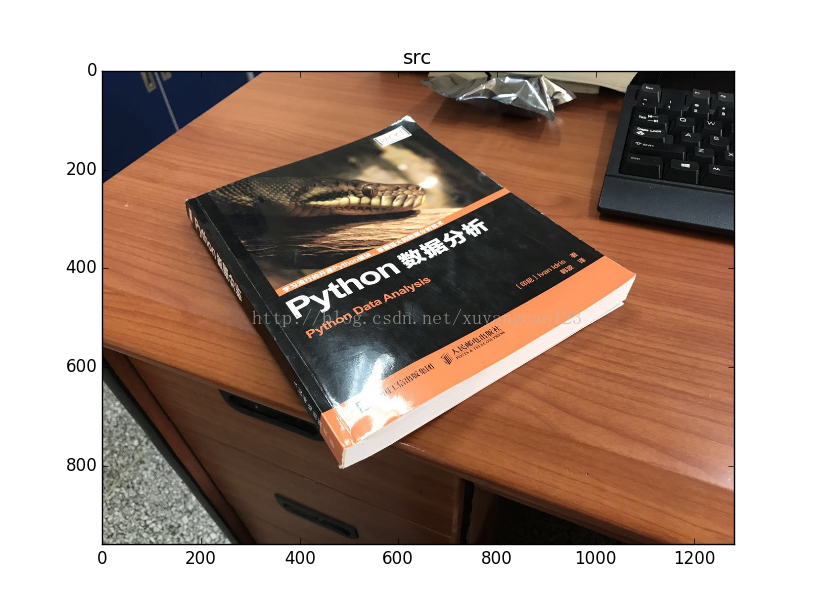
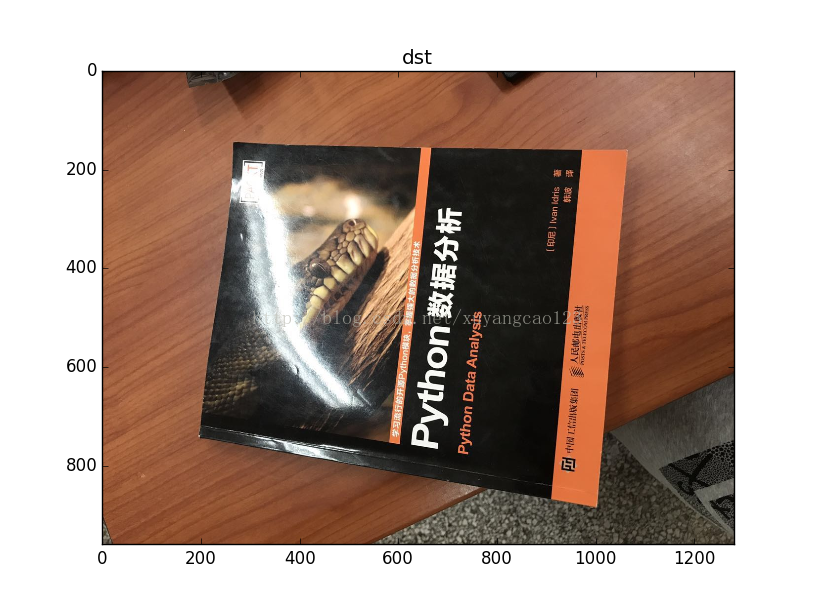
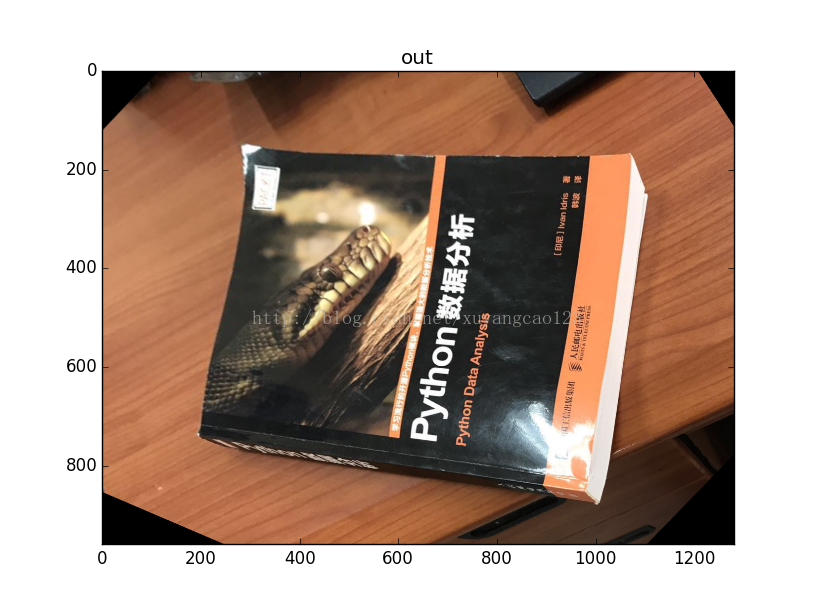
結果:import cv2 import numpy as np import pylab as pl if __name__ == '__main__' : # Read source image. im_src = cv2.imread('book2.jpg') # Four corners of the book in source image pts_src = np.array([[167.0, 264.0], [482.0, 798.0], [1079.0, 403.0],[613.0, 84.0]]) # Read destination image. im_dst = cv2.imread('book1.jpg') # Four corners of the book in destination image. pts_dst = np.array([[193.0, 742.0],[996.0, 874.0],[1059.0, 157.0],[266.0, 145.0]]) # Calculate Homography h, status = cv2.findHomography(pts_src, pts_dst) # Warp source image to destination based on homography im_out = cv2.warpPerspective(im_src, h, (im_dst.shape[1],im_dst.shape[0])) pl.figure(), pl.imshow(im_src[:, :, ::-1]), pl.title('src'), pl.figure(), pl.imshow(im_dst[:, :, ::-1]), pl.title('dst') pl.figure(), pl.imshow(im_out[:, :, ::-1]), pl.title('out'), pl.show() #show dst