
KITTI 資料集
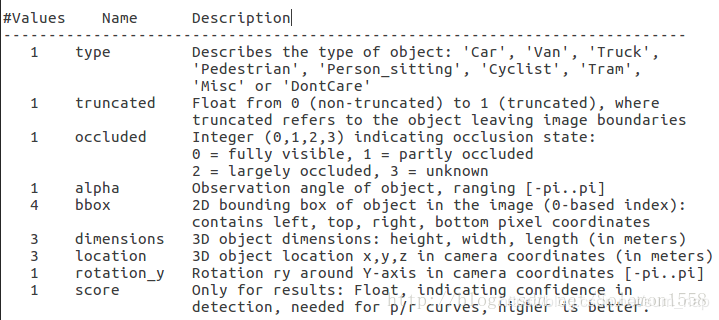
欄位一:type
物體類別:‘Car’, ‘Van’, ‘Truck’,‘Pedestrian’, ‘Person_sitting’, ‘Cyclist’,‘Tram’, ‘Misc’ or ‘DontCare’
注意,’DontCare’ 標籤表示該區域沒有被標註,比如由於目標物體距離鐳射雷達太遠。為了防止在評估過程中(主要是計算precision),將本來是目標物體但是因為某些原因而沒有標註的區域統計為假陽性(false positives),評估指令碼會自動忽略’DontCare’ 區域的預測結果。
欄位2:truncated
代表物體是否在影象內,取值為0~1之間的浮點數
欄位3:occuluded
代表物體是否被遮擋
取值為整數0,1,2,3表示被遮擋的程度
0:完全可見 1:小部分遮擋 2:大部分遮擋 3:完全遮擋(unknown)
欄位4:alpha
物體的觀測角度(全域性角度):
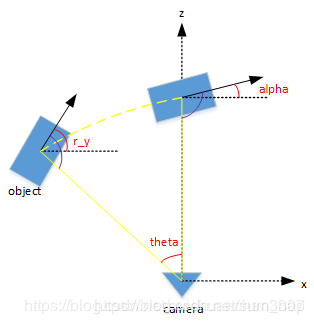
alpha,物體的觀察角度,範圍:[-π,π]
是在相機座標系下,以相機原點為中心,相機原點到物體中心的連線為半徑,將物體繞相機y軸旋轉至相機z軸,此時物體方向與相機x軸的夾角
r_y + pi/2 -theta = alpha +pi/2(即圖中紫色的角是相等的)
所以alpha = r_y - theta
欄位5~8:2D標註框
物體的2維邊界框:xmin,ymin,xmax,ymax;分別為該邊界框在2D影象上的左、上、右、下,四個地方的邊界線。該四條邊界線組成的框。
欄位9~11:3維物體的尺寸:在空間中的長寬高
欄位12~15:在相機座標系下的3D物體位置(劃重點,此處用的是相機座標系,不是lidar座標系!!!!)
欄位16:3維物體的空間方向:rotation_y;
這個y方向指的是鐳射點雲的座標系。範圍[-π,π];