
六軸感測器MPU6050
1.六軸與九軸的區別
六軸包括:三軸加速度計、三軸陀螺儀
九軸包括:三軸加速度計、三軸陀螺儀、三軸磁強計
2.MPU6050簡單介紹
MPU6050 是 InvenSense 公司推出的全球首款整合性 6 軸運動處理元件,相較於多元件方案,免除了組合陀螺儀與加速器時之軸間差的問題,減少了安裝空間。MPU6050 內部整合了 3 軸陀螺儀和 3 軸加速度感測器,並且含有一個第二 IIC 介面,可用於連線外部磁力感測器即AUX_CL 和 AUX_DA,並利用自帶的數字運動處理器(DMP: DigitalMotion
Processor)硬體加速引擎,通過主 IIC 介面,嚮應用端輸出完整的 9 軸融合演算資料。有了 DMP,我們可以使用 InvenSense 公司提供的運動處理資料庫,非常方便的實現姿態解算,降低了運動處理運算對作業系統的負荷,同時大大降低了開發難度。
3.模組原理圖
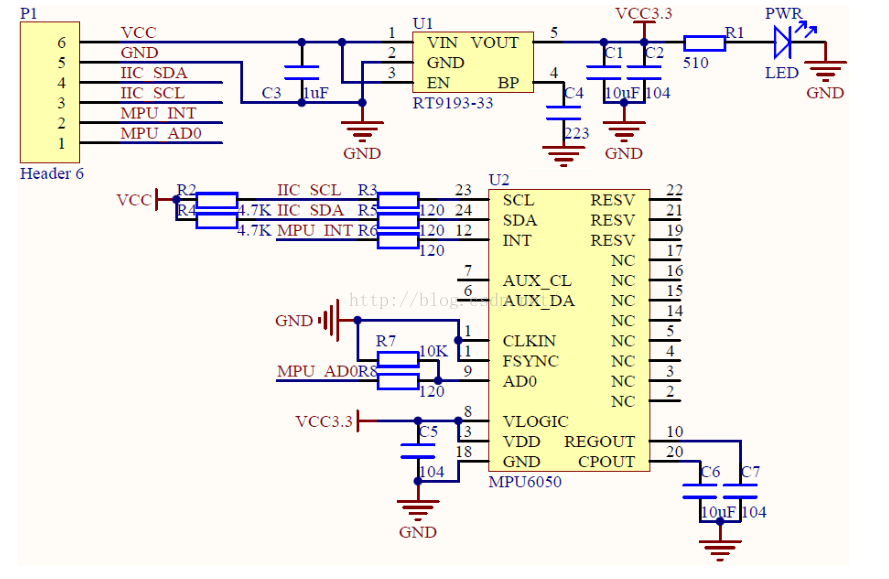
其中,SCL 和 SDA 是連線 MCU 的 IIC 介面,MCU 通過這個 IIC 介面來控制 MPU6050,
另外還有一個 IIC 介面:AUX_CL 和 AUX_DA,這個介面可用來連線外部從裝置,比如磁
感測器,這樣就可以組成一個九軸感測器。VLOGIC 是 IO 口電壓,該引腳最低可以到 1.8V,
我們一般直接接 VDD 即可。AD0 是從 IIC 介面(接 MCU)的地址控制引腳,該引腳控制
IIC 地址的最低位。如果接 GND,則 MPU6050 的 IIC 地址是:0X68,如果接 VDD,則是
0X69,注意:這裡的地址是不包含資料傳輸的最低位的(最低位用來表示讀寫)!!
4.初始化步驟及暫存器詳解
1 )初始化 IIC 介面
MPU6050 採用 IIC 與 STM32F1 通訊,所以我們需要先初始化與 MPU6050 連線的 SDA
和 SCL 資料線。
2 )復位 MPU6050
這一步讓 MPU6050 內部所有暫存器恢復預設值,通過對電源管理暫存器 1(0X6B)的
bit7 寫 1 實現。 復位後,電源管理暫存器 1 恢復預設值(0X40),然後必須設定該暫存器為
0X00,以喚醒 MPU6050,進入正常工作狀態。
3 )設定角速度感測器(陀螺儀)和加速度感測器的滿量程範圍
這一步,我們設定兩個感測器的滿量程範圍(FSR),分別通過陀螺儀配置暫存器(0X1B)
和加速度感測器配置暫存器(0X1C)設定。我們一般設定陀螺儀的滿量程範圍為±2000dps,
加速度感測器的滿量程範圍為±2g。
4 )設定其他引數
這裡,我們還需要配置的引數有:關閉中斷、關閉 AUX IIC 介面、禁止 FIFO、設定陀
螺儀取樣率和設定數字低通濾波器(DLPF)等。我們不用中斷方式讀取資料,所以關
閉中斷,然後也沒用到 AUX IIC 介面外接其他感測器,所以也關閉這個介面。分別通過中
斷使能暫存器(0X38)和使用者控制暫存器(0X6A)控制。MPU6050 可以使用 FIFO 儲存傳
感器資料,不過我們沒有用到,所以關閉所有 FIFO 通道,這個通過 FIFO 使能暫存器
(0X23)控制,預設都是 0(即禁止 FIFO),所以用預設值就可以了。陀螺儀取樣率通過採
樣率分頻暫存器(0X19)控制,這個取樣率我們一般設定為 50 即可。數字低通濾波器(DLPF)
則通過配置暫存器(0X1A)設定,一般設定 DLPF 為頻寬的 1/2 即可。
5 )配置系統時鐘源並使能角速度感測器和加速度感測器
系統時鐘源同樣是通過電源管理暫存器 1(0X1B)來設定,該暫存器的最低三位用於
設定系統時鐘源選擇,預設值是 0(內部 8M RC 震盪),不過我們一般設定為 1,選擇 x 軸
陀螺 PLL 作為時鐘源,以獲得更高精度的時鐘。同時,使能角速度感測器和加速度感測器,
這兩個操作通過電源管理暫存器 2(0X6C)來設定,設定對應位為 0 即可開啟。
至此,MPU6050 的初始化就完成了,可以正常工作了(其他未設定的暫存器全部採用
預設值即可),接下來,我們就可以讀取相關暫存器,得到加速度感測器、角速度感測器和
溫度感測器的資料了。不過,我們先簡單介紹幾個重要的暫存器。
首先,我們介紹電源管理暫存器 1,該暫存器地址為 0X6B,各位描述如圖

其中,DEVICE_RESET 位用來控制復位,設定為 1,復位 MPU6050,復位結束後,MPU
硬體自動清零該位。SLEEEP 位用於控制 MPU6050 的工作模式,復位後,該位為 1,即進
入了睡眠模式(低功耗),所以我們要清零該位,以進入正常工作模式。TEMP_DIS 用於設
置是否使能溫度感測器,設定為 0,則使能。最後 CLKSEL[2:0]用於選擇系統時鐘源,選擇
關係如表
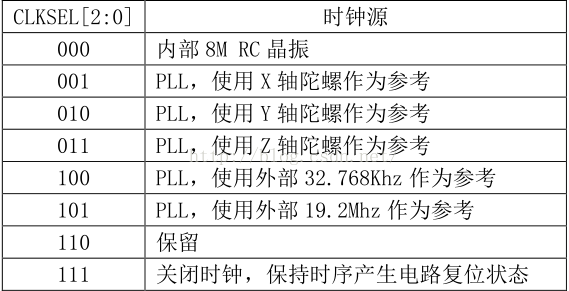
預設是使用內部 8M RC 晶振的,精度不高,所以我們一般選擇 X/Y/Z 軸陀螺作為參考
的 PLL 作為時鐘源,一般設定 CLKSEL=001 即可。
接著,我們看陀螺儀配置暫存器,該暫存器地址為:0X1B,各位描述如圖

該暫存器我們只關心 FS_SEL[1:0]這兩個位,用於設定陀螺儀的滿量程範圍:0,±250°
/S;1,±500°/S;2,±1000°/S;3,±2000°/S;我們一般設定為 3,即±2000°/S,因
為陀螺儀的 ADC 為 16 位解析度,所以得到靈敏度為:65536/4000=16.4LSB/(°/S)。
接下來,我們看加速度感測器配置暫存器,暫存器地址為:0X1C,各位描述如圖

該暫存器我們只關心 AFS_SEL[1:0]這兩個位,用於設定加速度感測器的滿量程範圍:0,
±2g;1,±4g;2,±8g;3,±16g;我們一般設定為 0,即±2g,因為加速度感測器的
ADC 也是 16 位,所以得到靈敏度為:65536/4=16384LSB/g。
接下來,我看看 FIFO 使能暫存器,暫存器地址為:0X1C,各位描述如圖

該暫存器用於控制 FIFO 使能,在簡單讀取感測器資料的時候,可以不用 FIFO,設定
對應位為 0 即可禁止 FIFO,設定為 1,則使能 FIFO。注意加速度感測器的 3 個軸,全由 1
個位(ACCEL_FIFO_EN)控制,只要該位置 1,則加速度感測器的三個通道都開啟 FIFO
了。
接下來,我們看陀螺儀取樣率分頻暫存器,暫存器地址為:0X19,各位描述如圖

該暫存器用於設定 MPU6050 的陀螺儀取樣頻率,計算公式為:
取樣頻率 = 陀螺儀輸出頻率 / (1+SMPLRT_DIV)
這裡陀螺儀的輸出頻率,是 1Khz 或者 8Khz,與數字低通濾波器(DLPF)的設定有關,
當 DLPF_CFG=0/7 的時候,頻率為 8Khz,其他情況是 1Khz。而且 DLPF 濾波頻率一般設定
為取樣率的一半。取樣率,我們假定設定為 50Hz,那麼 SMPLRT_DIV=1000/50-1=19。
接下來,我們看配置暫存器,暫存器地址為:0X1A,各位描述如圖

這裡,我們主要關心數字低通濾波器(DLPF)的設定位,即:DLPF_CFG[2:0],加速
度計和陀螺儀,都是根據這三個位的配置進行過濾的。DLPF_CFG 不同配置對應的過濾情
況如表

這裡的加速度感測器,輸出速率(Fs)固定是 1Khz,而角速度感測器的輸出速率(Fs),
則根據 DLPF_CFG 的配置有所不同。一般我們設定角速度感測器的頻寬為其取樣率的一半,
如前面所說的,如果設定取樣率為 50Hz,那麼頻寬就應該設定為 25Hz,取近似值 20Hz,
就應該設定 DLPF_CFG=100。
接下來,我們看電源管理暫存器 2,暫存器地址為:0X6C,各位描述如圖

該暫存器的 LP_WAKE_CTRL 用於控制低功耗時的喚醒頻率,本章用不到。剩下的 6
位,分別控制加速度和陀螺儀的 x/y/z 軸是否進入待機模式,這裡我們全部都不進入待機模
式,所以全部設定為 0 即可。
接下來,我們看看陀螺儀資料輸出暫存器,總共有 8 個暫存器組成,地址為:0X43~0X48,
通過讀取這 8 個暫存器,就可以讀到陀螺儀 x/y/z 軸的值,比如 x 軸的資料,可以通過讀取
0X43(高 8 位)和 0X44(低 8 位)暫存器得到,其他軸以此類推。
同樣,加速度感測器資料輸出暫存器,也有 8 個,地址為:0X3B~0X40,通過讀取這 8
個暫存器,就可以讀到加速度感測器 x/y/z 軸的值,比如讀 x 軸的資料,可以通過讀取 0X3B
(高 8 位)和 0X3C(低 8 位)暫存器得到,其他軸以此類推。
最後,溫度感測器的值,可以通過讀取 0X41(高 8 位)和 0X42(低 8 位)暫存器得到,
溫度換算公式為:
Temperature = 36.53 + regval/340
其中,Temperature 為計算得到的溫度值,單位為℃,regval 為從 0X41 和 0X42 讀到的
溫度感測器值。
5.DMP使用
我們可以讀出 MPU6050 的加速度感測器和角速度感測器的原始數
據。不過這些原始資料,對想搞四軸之類的初學者來說,用處不大,我們期望得到的是姿態
資料,也就是尤拉角:航向角(yaw)、橫滾角(roll)和俯仰角(pitch)。有了這三個角,我
們就可以得到當前四軸的姿態,這才是我們想要的結果。
要得到尤拉角資料,就得利用我們的原始資料,進行姿態融合解算,這個比較複雜,知
識點比較多,初學者 不易掌握。而 MPU6050 自帶了數字運動處理器,即 DMP,並且,
InvenSense 提供了一個 MPU6050 的嵌入式運動驅動庫,結合 MPU6050 的 DMP,可以將我
們的原始資料,直接轉換成四元數輸出,而得到四元數之後,就可以很方便的計算出尤拉角,
從而得到 yaw、roll 和 pitch。
使用內建的 DMP,大大簡化了四軸的程式碼設計,且 MCU 不用進行姿態解算過程,大
大降低了 MCU 的負擔,從而有更多的時間去處理其他事件,提高系統實時性。
使用 MPU6050 的 DMP 輸出的四元數是 q30 格式的,也就是浮點數放大了 2 的 30 次方
倍。在換算成尤拉角之前,必須先將其轉換為浮點數,也就是除以 2 的 30 次方,然後再進
行計算,計算公式為:
q0=quat[0] / q30; //q30 格式轉換為浮點數
q1=quat[1] / q30;
q2=quat[2] / q30;
q3=quat[3] / q30;
//計算得到俯仰角/橫滾角/航向角
pitch=asin(-2 * q1 * q3 + 2 * q0* q2)* 57.3; //俯仰角
roll=atan2(2 * q2 * q3 + 2 * q0 * q1, -2 * q1 * q1 - 2 * q2* q2 + 1)* 57.3; //橫滾角
yaw=atan2(2*(q1*q2 + q0*q3),q0*q0+q1*q1-q2*q2-q3*q3) * 57.3; //航向角
其中 quat[0]~ quat[3]是 MPU6050 的 DMP 解算後的四元數,q30 格式,所以要除以一個
2 的 30 次方,其中 q30 是一個常量:1073741824,即 2 的 30 次方,然後帶入公式,計算出
尤拉角。上述計算公式的 57.3 是弧度轉換為角度,即 180/π,這樣得到的結果就是以度(°)
為單位的。
nvenSense 提供的 MPU6050 運動驅動庫是基於 MSP430 ,官方DMP驅動庫移植起來,還是比較簡單的,主要是實現這4個函式:i2c_write,i2c_read,delay_ms 和 get_ms,主要移植六個檔案:

該驅動庫,重點就是兩個 c 檔案:inv_mpu.c 和 inv_mpu_dmp_motion_driver.c。其中我
們在 inv_mpu.c 添加了幾個函式,方便我們使用,重點是兩個函式:mpu_dmp_init 和
mpu_dmp_get_data 這兩個函式,這裡我們簡單介紹下這兩個函式。
mpu_dmp_init,是 MPU6050 DMP 初始化函式,該函式程式碼如下:
//mpu6050,dmp 初始化
//返回值:0,正常
// 其他,失敗
u8 mpu_dmp_init(void)
{
u8 res=0;
IIC_Init(); //初始化 IIC 匯流排
if(mpu_init()==0) //初始化 MPU6050
{
res=mpu_set_sensors(INV_XYZ_GYRO|INV_XYZ_ACCEL);//設需要的感測器
if(res)return 1;
res=mpu_configure_fifo(INV_XYZ_GYRO|INV_XYZ_ACCEL);//設定 FIFO
if(res)return 2;
res=mpu_set_sample_rate(DEFAULT_MPU_HZ); //設定取樣率
if(res)return 3;
res=dmp_load_motion_driver_firmware(); //載入 dmp 韌體
if(res)return 4;
res=dmp_set_orientation(inv_orientation_matrix_to_scalar(gyro_orientation));
//設定陀螺儀方向
if(res)return 5;
res=dmp_enable_feature(DMP_FEATURE_6X_LP_QUAT|DMP_FEATURE_TAP
|DMP_FEATURE_ANDROID_ORIENT|DMP_FEATURE_SEND_RAW_ACCEL
|DMP_FEATURE_SEND_CAL_GYRO|DMP_FEATURE_GYRO_CAL);
//設定 dmp 功能
if(res)return 6;
res=dmp_set_fifo_rate(DEFAULT_MPU_HZ);//設定 DMP 輸出速率(最大 200Hz)
if(res)return 7;
res=run_self_test(); //自檢
if(res)return 8;
res=mpu_set_dmp_state(1); //使能 DMP
if(res)return 9;
}
return 0;
}
此函式首先通過 IIC_Init(需外部提供)初始化與 MPU6050 連線的 IIC 介面,然後呼叫
mpu_init 函式,初始化 MPU6050,之後就是設定 DMP 所用感測器、FIFO、取樣率和載入
韌體等一系列操作,在所有操作都正常之後,最後通過 mpu_set_dmp_state(1)使能 DMP 功
能,在使能成功以後,我們便可以通過 mpu_dmp_get_data 來讀取姿態解算後的資料了。
mpu_dmp_get_data 函式程式碼如下:
//得到 dmp 處理後的資料(注意,本函式需要比較多堆疊,區域性變數有點多)
//pitch:俯仰角 精度:0.1° 範圍:-90.0° <---> +90.0°
//roll:橫滾角 精度:0.1° 範圍:-180.0°<---> +180.0°
//yaw:航向角 精度:0.1° 範圍:-180.0°<---> +180.0°
//返回值:0,正常
// 其他,失敗
u8 mpu_dmp_get_data(float *pitch,float *roll,float *yaw)
{
float q0=1.0f,q1=0.0f,q2=0.0f,q3=0.0f;
unsigned long sensor_timestamp;
short gyro[3], accel[3], sensors;
unsigned char more;
long quat[4];
if(dmp_read_fifo(gyro, accel, quat, &sensor_timestamp, &sensors,&more))return 1;
if(sensors&INV_WXYZ_QUAT)
{
q0 = quat[0] / q30; //q30 格式轉換為浮點數
q1 = quat[1] / q30;
q2 = quat[2] / q30;
q3 = quat[3] / q30;
//計算得到俯仰角/橫滾角/航向角
*pitch = asin(-2 * q1 * q3 + 2 * q0* q2)* 57.3; // pitch
*roll = atan2(2 * q2 * q3 + 2 * q0 * q1, -2 * q1 * q1 - 2 * q2* q2 + 1)* 57.3;// roll
*yaw= atan2(2*(q1*q2 + q0*q3),q0*q0+q1*q1-q2*q2-q3*q3) * 57.3;//yaw
}else return 2;
return 0;
}
此函式用於得到 DMP 姿態解算後的俯仰角、橫滾角和航向角。這裡就用到了我們前面
介紹的四元數轉尤拉角公式,將 dmp_read_fifo 函式讀到的 q30 格式四元數轉換成尤拉角。
6.實現部分原始碼
//初始化 MPU6050
//返回值:0,成功
// 其他,錯誤程式碼
u8 MPU_Init(void)
{
u8 res;
MPU_IIC_Init(); //初始化 IIC 匯流排
MPU_Write_Byte(MPU_PWR_MGMT1_REG,0X80);//復位 MPU6050
delay_ms(100);
MPU_Write_Byte(MPU_PWR_MGMT1_REG,0X00);//喚醒 MPU6050
MPU_Set_Gyro_Fsr(3); //陀螺儀感測器,±2000dps
MPU_Set_Accel_Fsr(0); //加速度感測器,±2g
MPU_Set_Rate(50); //設定取樣率 50Hz
MPU_Write_Byte(MPU_INT_EN_REG,0X00); //關閉所有中斷
MPU_Write_Byte(MPU_USER_CTRL_REG,0X00); //I2C 主模式關閉
MPU_Write_Byte(MPU_FIFO_EN_REG,0X00); //關閉 FIFO
MPU_Write_Byte(MPU_INTBP_CFG_REG,0X80); //INT 引腳低電平有效
res=MPU_Read_Byte(MPU_DEVICE_ID_REG);
if(res==MPU_ADDR)//器件 ID 正確
{
MPU_Write_Byte(MPU_PWR_MGMT1_REG,0X01);
//設定 CLKSEL,PLL X 軸為參考
MPU_Write_Byte(MPU_PWR_MGMT2_REG,0X00);//加速度與陀螺儀都工作
MPU_Set_Rate(50); //設定取樣率為 50Hz
}else return 1;
return 0;
}
//得到溫度值
//返回值:溫度值(擴大了 100 倍)
short MPU_Get_Temperature(void)
{
u8 buf[2];
short raw; float temp;
MPU_Read_Len(MPU_ADDR,MPU_TEMP_OUTH_REG,2,buf);
raw=((u16)buf[0]<<8)|buf[1];
temp=36.53+((double)raw)/340;
return temp*100;
}
//得到陀螺儀值(原始值)
//gx,gy,gz:陀螺儀 x,y,z 軸的原始讀數(帶符號)
//返回值:0,成功
// 其他,錯誤程式碼
u8 MPU_Get_Gyroscope(short *gx,short *gy,short *gz)
{
u8 buf[6],res;
res=MPU_Read_Len(MPU_ADDR,MPU_GYRO_XOUTH_REG,6,buf);
if(res==0)
{
*gx=((u16)buf[0]<<8)|buf[1];
*gy=((u16)buf[2]<<8)|buf[3];
*gz=((u16)buf[4]<<8)|buf[5];
}
return res;;
}
//得到加速度值(原始值)
//gx,gy,gz:陀螺儀 x,y,z 軸的原始讀數(帶符號)
//返回值:0,成功
// 其他,錯誤程式碼
u8 MPU_Get_Accelerometer(short *ax,short *ay,short *az)
{
u8 buf[6],res;
res=MPU_Read_Len(MPU_ADDR,MPU_ACCEL_XOUTH_REG,6,buf);
if(res==0)
{
*ax=((u16)buf[0]<<8)|buf[1];
*ay=((u16)buf[2]<<8)|buf[3];
*az=((u16)buf[4]<<8)|buf[5];
}
return res;;
}
/IIC 連續寫
//addr:器件地址
//reg:暫存器地址
//len:寫入長度
//buf:資料區
//返回值:0,正常
// 其他,錯誤程式碼
u8 MPU_Write_Len(u8 addr,u8 reg,u8 len,u8 *buf)
{
u8 i;
IIC_Start();
IIC_Send_Byte((addr<<1)|0);//傳送器件地址+寫命令
if(IIC_Wait_Ack()){IIC_Stop();return 1;}//等待應答
IIC_Send_Byte(reg); //寫暫存器地址
IIC_Wait_Ack(); //等待應答
for(i=0;i<len;i++)
{
IIC_Send_Byte(buf[i]); //傳送資料
if(IIC_Wait_Ack()) {IIC_Stop();return 1;}//等待 ACK
}
IIC_Stop();
return 0;
}
//IIC 連續讀
//addr:器件地址
//reg:要讀取的暫存器地址
//len:要讀取的長度
//buf:讀取到的資料儲存區
//返回值:0,正常
// 其他,錯誤程式碼
u8 MPU_Read_Len(u8 addr,u8 reg,u8 len,u8 *buf)
{
IIC_Start();
IIC_Send_Byte((addr<<1)|0); //傳送器件地址+寫命令
if(IIC_Wait_Ack()){ IIC_Stop();return 1; } //等待應答
IIC_Send_Byte(reg); //寫暫存器地址
IIC_Wait_Ack(); //等待應答
IIC_Start();
IIC_Send_Byte((addr<<1)|1);//傳送器件地址+讀命令
IIC_Wait_Ack(); //等待應答
while(len)
{
if(len==1)*buf=IIC_Read_Byte(0);//讀資料,傳送 nACK
else *buf=IIC_Read_Byte(1); //讀資料,傳送 ACK
len--; buf++;
}
IIC_Stop(); //產生一個停止條件
return 0;
}
//串列埠 1 傳送 1 個字元
//c:要傳送的字元
void usart1_send_char(u8 c)
{
while((USART1->SR&0X40)==0);//等待上一次傳送完畢
USART1->DR=c;
}
//傳送資料給匿名四軸上位機軟體(V2.6 版本)
//fun:功能字. 0XA0~0XAF
//data:資料快取區,最多 28 位元組!!
//len:data 區有效資料個數
void usart1_niming_report(u8 fun,u8*data,u8 len)
{
u8 send_buf[32]; u8 i;
if(len>28)return; //最多 28 位元組資料
send_buf[len+3]=0; //校驗數置零
send_buf[0]=0X88; //幀頭
send_buf[1]=fun; //功能字
send_buf[2]=len; //資料長度
for(i=0;i<len;i++)send_buf[3+i]=data[i]; //複製資料
for(i=0;i<len+3;i++)send_buf[len+3]+=send_buf[i]; //計算校驗和
for(i=0;i<len+4;i++)usart1_send_char(send_buf[i]); //傳送資料到串列埠 1
}
//傳送加速度感測器資料和陀螺儀資料
//aacx,aacy,aacz:x,y,z 三個方向上面的加速度值
//gyrox,gyroy,gyroz:x,y,z 三個方向上面的陀螺儀值
void mpu6050_send_data(short aacx,short aacy,short aacz,short gyrox,short gyroy,short
gyroz)
{
u8 tbuf[12];
tbuf[0]=(aacx>>8)&0XFF;
tbuf[1]=aacx&0XFF;
tbuf[2]=(aacy>>8)&0XFF;
tbuf[3]=aacy&0XFF;
tbuf[4]=(aacz>>8)&0XFF;
tbuf[5]=aacz&0XFF;
tbuf[6]=(gyrox>>8)&0XFF;
tbuf[7]=gyrox&0XFF;
tbuf[8]=(gyroy>>8)&0XFF;
tbuf[9]=gyroy&0XFF;
tbuf[10]=(gyroz>>8)&0XFF;
tbuf[11]=gyroz&0XFF;
usart1_niming_report(0XA1,tbuf,12);//自定義幀,0XA1
}
//通過串列埠 1 上報結算後的姿態資料給電腦
//aacx,aacy,aacz:x,y,z 三個方向上面的加速度值
//gyrox,gyroy,gyroz:x,y,z 三個方向上面的陀螺儀值
//roll:橫滾角.單位 0.01 度。 -18000 -> 18000 對應 -180.00 -> 180.00 度
//pitch:俯仰角.單位 0.01 度。-9000 - 9000 對應 -90.00 -> 90.00 度
//yaw:航向角.單位為 0.1 度 0 -> 3600 對應 0 -> 360.0 度
void usart1_report_imu(short aacx,short aacy,short aacz,short gyrox,short gyroy,short
gyroz,short roll,short pitch,short yaw)
{
u8 tbuf[28]; u8 i;
for(i=0;i<28;i++)tbuf[i]=0;//清 0
tbuf[0]=(aacx>>8)&0XFF;
tbuf[1]=aacx&0XFF;
tbuf[2]=(aacy>>8)&0XFF;
tbuf[3]=aacy&0XFF;
tbuf[4]=(aacz>>8)&0XFF;
tbuf[5]=aacz&0XFF;
tbuf[6]=(gyrox>>8)&0XFF;
tbuf[7]=gyrox&0XFF;
tbuf[8]=(gyroy>>8)&0XFF;
tbuf[9]=gyroy&0XFF;
tbuf[10]=(gyroz>>8)&0XFF;
tbuf[11]=gyroz&0XFF;
tbuf[18]=(roll>>8)&0XFF;
tbuf[19]=roll&0XFF;
tbuf[20]=(pitch>>8)&0XFF;
tbuf[21]=pitch&0XFF;
tbuf[22]=(yaw>>8)&0XFF;
tbuf[23]=yaw&0XFF;
usart1_niming_report(0XAF,tbuf,28);//飛控顯示幀,0XAF
}
int main(void)
{
u8 t=0,report=1; //預設開啟上報
u8 key;
float pitch,roll,yaw; //尤拉角
short aacx,aacy,aacz; //加速度感測器原始資料
short gyrox,gyroy,gyroz; //陀螺儀原始資料
short temp; //溫度
Stm32_Clock_Init(9); //系統時鐘設定
uart_init(72,500000); //串列埠初始化為 500000
delay_init(72); //延時初始化
usmart_dev.init(72); //初始化 USMART
LED_Init(); //初始化與 LED 連線的硬體介面
KEY_Init(); //初始化按鍵
LCD_Init(); //初始化 LCD
MPU_Init(); //初始化 MPU6050
POINT_COLOR=RED; //設定字型為紅色
LCD_ShowString(30,50,200,16,16,"Mini STM32");
LCD_ShowString(30,70,200,16,16,"MPU6050 TEST");
LCD_ShowString(30,90,200,16,16,"[email protected]");
LCD_ShowString(30,110,200,16,16,"2015/4/18");
while(mpu_dmp_init())
{
LCD_ShowString(30,130,200,16,16,"MPU6050 Error"); delay_ms(200);
LCD_Fill(30,130,239,130+16,WHITE); delay_ms(200);
}
LCD_ShowString(30,130,200,16,16,"MPU6050 OK");
LCD_ShowString(30,150,200,16,16,"KEY0:UPLOAD ON/OFF");
POINT_COLOR=BLUE;//設定字型為藍色
LCD_ShowString(30,170,200,16,16,"UPLOAD ON ");
LCD_ShowString(30,200,200,16,16," Temp: . C");
LCD_ShowString(30,220,200,16,16,"Pitch: . C");
LCD_ShowString(30,240,200,16,16," Roll: . C");
LCD_ShowString(30,260,200,16,16," Yaw : . C");
while(1)
{
key=KEY_Scan(0);
if(key==KEY0_PRES)
{
report=!report;
if(report)LCD_ShowString(30,170,200,16,16,"UPLOAD ON ");
else LCD_ShowString(30,170,200,16,16,"UPLOAD OFF");
}
if(mpu_dmp_get_data(&pitch,&roll,&yaw)==0)
{
temp=MPU_Get_Temperature(); //得到溫度值
MPU_Get_Accelerometer(&aacx,&aacy,&aacz); //得到加速度感測器資料
MPU_Get_Gyroscope(&gyrox,&gyroy,&gyroz); //得到陀螺儀資料
if(report)mpu6050_send_data(aacx,aacy,aacz,gyrox,gyroy,gyroz);
//用自定義幀傳送加速度和陀螺儀原始資料
if(report)usart1_report_imu(aacx,aacy,aacz,gyrox,gyroy,gyroz,(int)(roll*100),
(int)(pitch*100),(int)(yaw*10));
if((t%10)==0)
{
if(temp<0)
{
LCD_ShowChar(30+48,200,'-',16,0); //顯示負號
temp=-temp; //轉為正數
}else LCD_ShowChar(30+48,200,' ',16,0); //去掉負號
LCD_ShowNum(30+48+8,200,temp/100,3,16); //顯示整數部分
LCD_ShowNum(30+48+40,200,temp%10,1,16); //顯示小數部分
temp=pitch*10;
if(temp<0)
{
LCD_ShowChar(30+48,220,'-',16,0); //顯示負號
temp=-temp; //轉為正數
}else LCD_ShowChar(30+48,220,' ',16,0); //去掉負號
LCD_ShowNum(30+48+8,220,temp/10,3,16); //顯示整數部分
LCD_ShowNum(30+48+40,220,temp%10,1,16); //顯示小數部分
temp=roll*10;
if(temp<0)
{
LCD_ShowChar(30+48,240,'-',16,0); //顯示負號
temp=-temp; //轉為正數
}else LCD_ShowChar(30+48,240,' ',16,0); //去掉負號
LCD_ShowNum(30+48+8,240,temp/10,3,16); //顯示整數部分
LCD_ShowNum(30+48+40,240,temp%10,1,16); //顯示小數部分
temp=yaw*10;
if(temp<0)
{
LCD_ShowChar(30+48,260,'-',16,0); //顯示負號
temp=-temp; //轉為正數
}else LCD_ShowChar(30+48,260,' ',16,0); //去掉負號
LCD_ShowNum(30+48+8,260,temp/10,3,16); //顯示整數部分
LCD_ShowNum(30+48+40,260,temp%10,1,16); //顯示小數部分
t=0;
LED0=!LED0;//LED 閃爍
}
}
t++;
}
}