
基於Stm32的超聲波測距、OLED顯示、BEEP蜂鳴報警
1.目標/目的
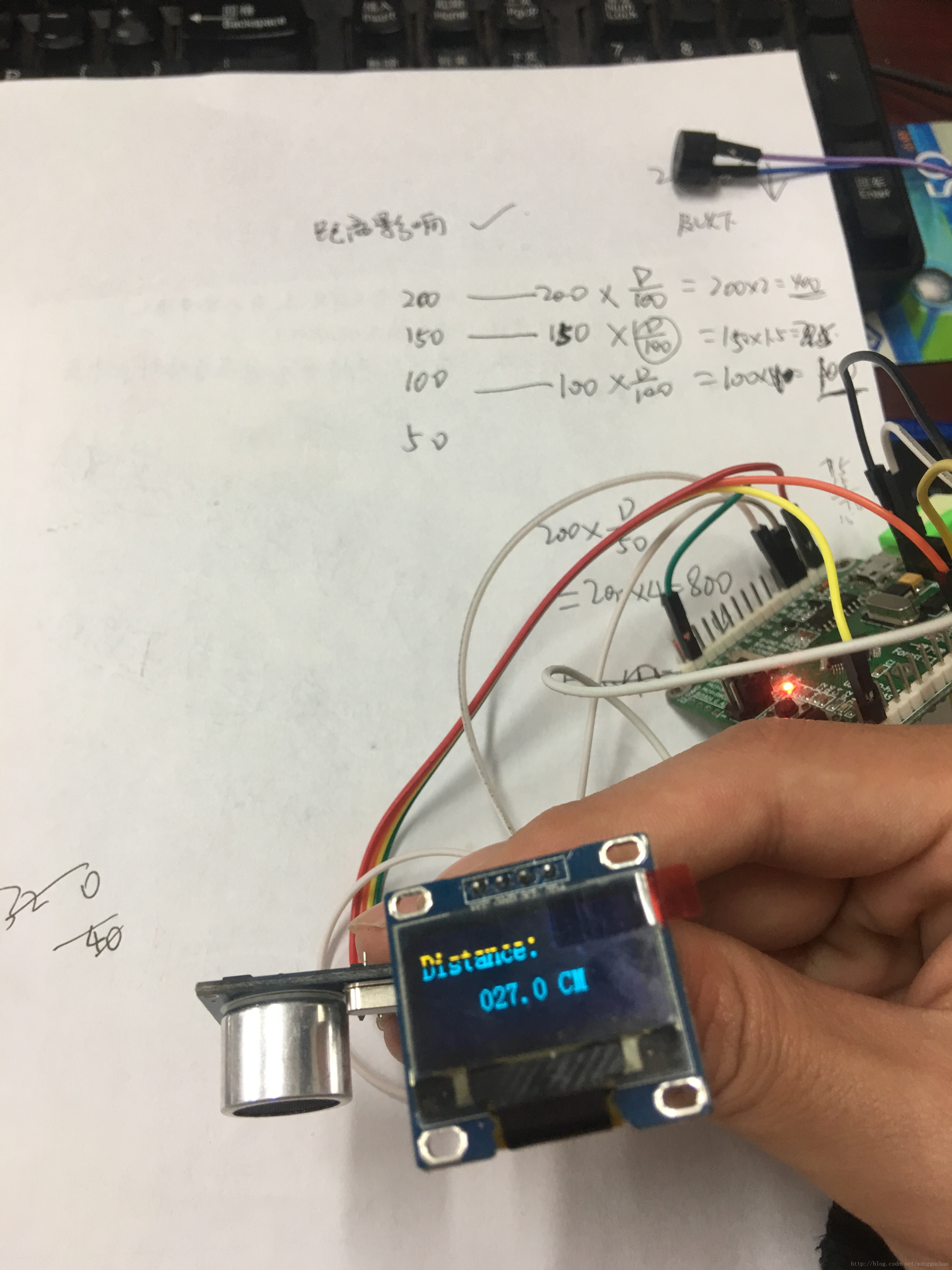
本人做移動機器人,超聲波亦或者是紅外測距報警都是肯定的,一個小實驗,目的是超聲測距,OLED顯示前方障礙的距離,距離過小時,蜂鳴器報警,且距離越小報警蜂鳴頻率越快。
2.硬體
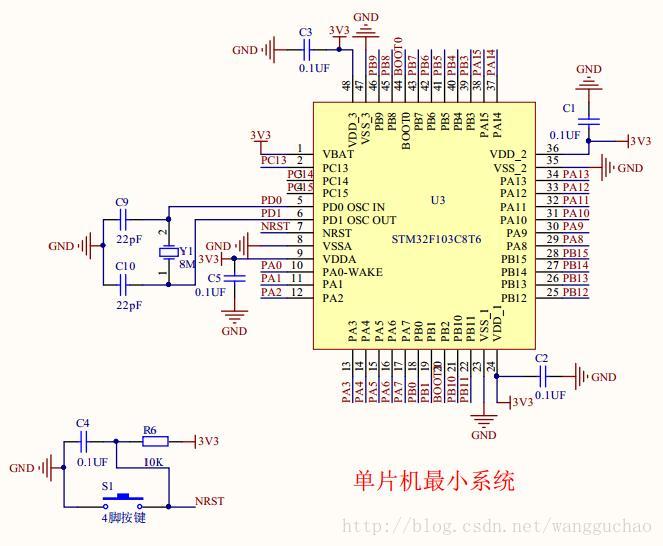
(1)stm32f1
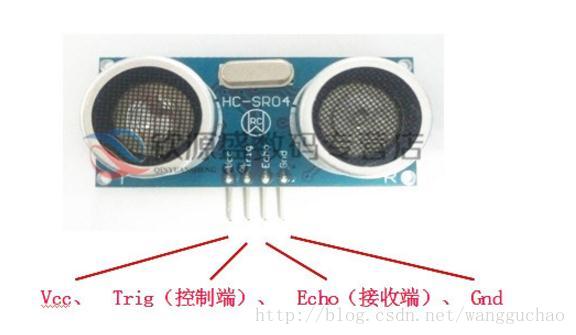
(2)超聲波HC-SRO4
(3)OLED12864
(4)BEEP
3.硬體引數
(1)微控制器stm32f1
(2)超聲波模組HC-SRO4
1:使用電壓:DC5V
2:靜態電流:小於2mA3:電平輸出:高5V
4:電平輸出:底0V5:感應角度:不大於15度
6:探測距離:2cm-450cm
7:高精度:可達0.3cm
板上接線方式,VCC---+5V
注: TRIP引腳是內部上拉10K的電阻,用微控制器的IO口拉低TRIP引腳,然後給一個10us以上的脈衝訊號。
OUT腳為此模組作為防盜模組時的開關量輸出腳,測距模組不用此腳!
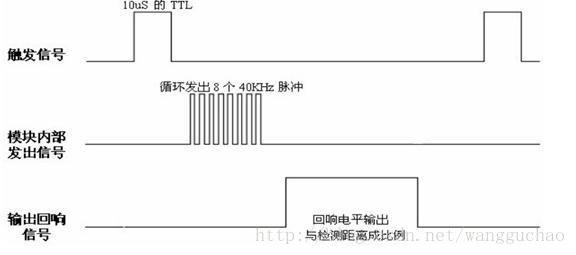
採用IO口TRIG觸發測距,給最少10us的高電平訊號。模組自動傳送8個40khz的方波,自動檢測是否有訊號返回;有訊號返回,通過IO口ECHO輸出一個高電平,同時開定時器計時,當此口變為低電平時就可以讀定時器的值,高電平持續的時間就是超聲波從發射到返回的時間。測試距離=(高電平時間*聲速(340M/S))/2;us
(3)OLED12864
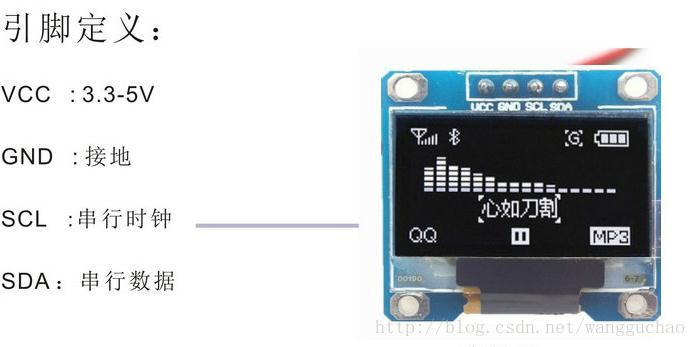
如圖用的IIC通訊。SCL---PB6,SCL---PB7
(4)BEEP(無源)
無源蜂鳴器意思是需要加音訊驅動訊號才能使其發出聲音,與有源蜂鳴器相對應。有源蜂鳴器只需要通上直流電即會發出蜂鳴聲,有源蜂鳴器內部自帶振盪器!
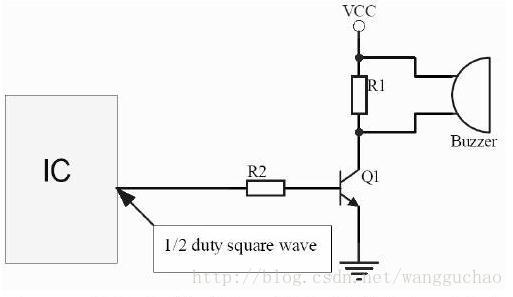
+接PA11,-接GND,定時器PWM脈衝驅動。
4.程式
相關推薦
基於Stm32的超聲波測距、OLED顯示、BEEP蜂鳴報警
1.目標/目的 本人做移動機器人,超聲波亦或者是紅外測距報警都是肯定的,一個小實驗,目的是超聲測距,OLED顯示前方障礙的距離,距離過小時,蜂鳴器報警,且距離越小報警蜂鳴頻率越快。 2.硬體 (1)stm32f1 (2)超聲波HC-SRO4 (3)OLED12864 (4)
基於QGLViewer實現的點雲顯示、框選(例項)
生活中處處面臨著狗血的選擇,如果你是個很吸引人的青年,你會發現身邊有很多選擇,但做出選擇往往是很難的。 而且大家有時候只能看,不能選,因為不會選,選錯了你就完蛋了。 如果這時候你會選了,選對了,就不用一個人過節了。 好,那麼今天
android應用市場、社群客戶端、漫畫App、TensorFlow Demo、歌詞顯示、動畫效果等原始碼
Android精選原始碼 MVP架構Android應用市場專案 android刻度盤控制元件原始碼 Android實現一個社群客戶端 android商品詳情頁上拉檢視詳情 基於RxJava+Retrofit2+Glide+ButterKnife的MVP模式漫畫app原始碼 an
JQuery練習丨多選、手風琴、省市聯動、突出顯示、刪除表格
<!DOCTYPE html> <html> <head> <meta charset="UTF-8"> <title></title> <script src="js/jquery-
STM32 超聲波測距模組HCSR-04 驅動程式
超聲波測距原理見:超聲波測距原理 超聲波測距模組:HC-SR04 採用定時器及外部中斷方式 /*******************************************************************************
datatables option columns.render 渲染列(3) url變超連結、圖片顯示、值替換(加樣式)
前言 用render在表格後面加按鈕 1、html程式碼 <table class="table table-striped table-hover table-bordered" i
IT觀察】網路通訊、圖片顯示、資料庫操作……Android程式設計師如何利用開源框架
【51CTO.com原創稿件】每個Android 程式設計師都不是Android應用開發之路上孤軍奮戰的一個人,GitHub上浩如煙海的開源框架或類庫就是前人為我們發明的輪子,有的輪子能提高軟體效能,而有的輪子似乎是以犧牲效能為代價換取程式設計速度。擅長利用輪子的程式設計師已經遙遙領先,不擅長利用輪子的
NGUI名字跟隨、傷害顯示、血條和miss效果的製作
這裡講一下類似於魔獸爭霸裡面的血條、傷害和miss效果的製作, 這個涉及到了NGUI裡面的HUDText,它是NGUI的擴充套件,有效的只有兩個指令碼。 其中一個是UIFollowTarget、另外一個是HUDText。 UIFollowTarget指令碼所在的物體在
C#2005 一個簡單的查詢介面程式碼:DataGridView使用、影象顯示、複合查詢樣例
using System;using System.Collections.Generic;using System.ComponentModel;using System.Data;using System.Drawing;using System.Text;using S
OLED的波形曲線、進度條、圖片顯示(STM32 HAL庫 模擬SPI通訊 5線OLED螢幕)詳細篇
少廢話,先上效果圖 螢幕顯示效果 全家福 觀看演示效果: https://www.bilibili.com/video/BV13V411b78V 一、基礎認識及引腳介紹 螢幕引數: 尺寸:0.96英寸 解析度:12
基於STM32的ROS智慧移動機器人構建地圖、定位以及自主導航研究
原文地址是:https://blog.csdn.net/huapiaoxiang21/article/details/81504395 好長時間沒寫部落格了,今天繼續工作的第一件事情是做一款STM32 的ROS智慧移動機器人,構建地圖以及自主導航。在這裡筆者認為最難的事情是搞機器人底盤,由於
超聲波測距模組(LCD顯示)—基於51微控制器
#include <reg52.h> #define uint unsigned int #define uchar unsigned char sbit Trig = P1^0; //控制端 sbit Echo = P1^1; //接收端
Linux下編譯、燒寫RT-Rhread,基於STM32微控制器(二)
上一篇文章主要描述了Linux安裝JLink驅動的過程,由於要關心國足的比賽停了一天,今天國足終於不出意外的輸給勒伊朗,所以工科小屌又來寫部落格了。 PC:Ubuntu14(32位),開發板STM32F103RE,JLink V8,RT_Thread V2.0 既然JLIn
基於Bootstrap的多圖片(檔案也可以)上傳、預覽、刪除、縮放、進度...顯示
一、引用js、css 二、Html程式碼 <input id="myFile" type="file" name="myFile" multiple class="file-loading
17、新手入手樹莓派教程--超聲波測距(HC-SR04)的使用
1.元件外觀: HC-SR04 模組可以測量 3cm - 4m 的距離,精確度可以達到 3mm。它包含了超聲波發射器、接收器和控制電路三部分。 2.接線方式 一共兩個電源引腳和兩個控
VS2017+OpenCV3.3基於SGBM演算法的雙目立體視覺、雙目測距(雙目校正和立體匹配)
前些日子做了一個關於雙目立體視覺的入門作業,現在在這裡總結一下學到的一些知識(寫的可能會有很多欠缺的地方,還望海涵!) 本篇部落格不涉及雙目標定的知識,關於雙目標定網上資料很多,大家可以自行查詢學習。 先說一下本部落格的雙目立體視覺的實現基礎,已知以下資訊:
基於Qt與OpenCV的圖片讀取、儲存,並利用Canny進行簡單的邊緣處理結果顯示
第一次寫CSDN部落格,最近在做畢業設計,有空之餘寫了一個圖片讀存和簡單OpenCV的邊緣處理。最終實現了圖片的讀取,邊緣檢測,儲存的功能。 本次採用Qt5.7(安裝包名稱為qt-opensource-windows-x86-mingw530-5.7.1.exe)與OpenCV3.1版本。兩者環境的配置就
基於stm32的超聲波測距
首先來看模組圖 在某寶上一搜就能找到,關於它的使用也是非常簡單,先看資料手冊裡面需要注意的幾點 1 基本的引數 在實際測試當中,最大測量三米多的距離還是可以,最小距離我沒有做測試,我測
Struts1應用、實現簡單計算器、使用DispatchAction、顯示友好的報錯信息、使用動態Form簡化開發
實體類 ica setattr sources 建立 -s number asc rlogin 實現簡單的支持加、減、乘、除的計算器 復制一份Struts1Demo改動:Struts1Calc 方案1: Struts1Calc 創建ActionForm: CalcFor
【JAVAEE學習筆記】hibernate02:實體規則、對象狀態、緩存、事務、批量查詢和實現客戶列表顯示
使用 ins tro trace ges create 綁定 criteria 命名 一、hibernate中的實體規則 實體類創建的註意事項 1.持久化類提供無參數構造 2.成員變量私有,提供共有get/set方法訪問.需提供屬性 3.持久化類中的屬性,應盡量使用包