
編寫第一個ROS(建立工作空間workspace和功能包package)
剛接觸ROS,學著寫了第一個程式,怕以後忘記,就將其步驟記錄下來。。
首先你必須保證你電腦已安裝配置好ROS。
1.建立工作空間(workspace)
我們所建立功能包package,應該全部放到一個叫做工作空間(workspace)的目錄中 。你可以把目錄儲存在你賬號的任何位置例如,我所建立的工作空間的是路徑/home,同時你可以用任何你喜歡的名字命名你的工作空間,我的工作空間名為 test,現在請使用標準的mkdir命令列去建立一個工作空間。我首先建立一個工作空間,名字為test,
此處建立的工作空間還需要在工作區目錄中建立一個叫做 src 的子目錄。這個子目錄將用於存放功能包的原始碼。而 程式碼中的 “-p” ,這時mkdir命令會自動建立所有不存在的目錄。
在終端命令中鍵入(開啟終端的快捷鍵為“Ctrl+Alt+T”)
mkdir -p ~/test/src
執行後你會發現你名為test的工作空間中已經有了一個src 的子目錄。這樣你的工作空間建立已經完成。
2.建立功能包(package)
建立一個新ROS功能包的命令應該在你工作空間中的src目錄下執行:catkin_create_pkg package-name,package-name指的是你功能包的名字,我所建立的功能包名為amin,注意是在你工作空間中的src目錄下執行(cd命令可以進入你要進入的目錄)繼續在終端中鍵入
cd ~/test/src
進入src目錄下執行
catkin_create_pkg amin
其實,這個功能包建立命令沒有做太多工作,它只不過建立了一個存放這個功能包的目錄(也就是我所建立的功能包amin),並在amin那個目錄下生成了兩個配置檔案。
第一個配置檔案,叫做 package.xml,稱為清單檔案。
第二個檔案,叫做 CMakeLists.txt,是一個 Cmake 的指令碼檔案,Cmake 是一個符合工業標準的跨平臺編譯系統。這個檔案包含了一系列的編譯指令,包括應該生成哪種可執行檔案,需要哪些原始檔,以及在哪裡可以找到所需的標頭檔案和連結庫。當然,這個檔案表明 catkin 在內部使用了 Cmake。
注意:ROS 包的命名遵循一個命名規範,只允許使用小寫字母、數字和下劃線,而且首字元必須是一個小寫字母。一些 ROS工具,包括 catkin,不支援那些不遵循此命名規範的包。
可以不看此處:編輯清單檔案 建立包後,你可能希望編輯其 package.xml 檔案,其中包含一些描述這個包的元資料。通過 catkin_create_pkg 建立的功能包預設含有很豐富的註釋,對於讀者在很大程度上是不言自明的。然而,請注意,無論是在編譯時還是在執行時,其中的大部分資訊 ROS 並沒有使用,這些資訊只有在你公開發布程式碼時才變得重要。本著保持文件與實際功能同步的精神,至少填寫description 和 maintainer 兩部分可能是比較合理的。
3.編寫ROS程式
我編寫一個簡單的 hello,ros!的程式,命名為hello.cpp。這個名為 hello.cpp 的原始檔 也 存 放 在 你 的 功 能 包 amin文 件 夾 中 , 挨 著 package.xml 和CMakeLists.txt。
注意:一些線上教程建議在你的功能包目錄中建立 src 目錄來存放 C ++原始檔。這個附加的組織結構可能是有益的,特別是對於那些含有多種型別檔案的較大的功能包,但它不是嚴格必要的。
#include <ros/ros.h> int main ( int argc , char ** argv ) { ros::init ( argc , argv , "hello" ) ; ros::NodeHandle nh ; ROS_INFO_STREAM( " Hello , ROS! " ) ; }
4.編譯 Hello 程式
我們該如何編譯和執行這個程式呢?這些交給ROS的catkin編譯系統來處理。
第一步:宣告依賴庫
首先,我們需要宣告程式所依賴的其他功能包。對於 c++程式而言,此步驟是必要的,以確保 catkin 能夠向 c++編譯器提供合適的標記來定位編譯功能包所需的標頭檔案和連結庫。為了給出依賴庫,
編輯包目錄下的 CMakeLists.txt 檔案。
該文件的預設版本含有如下行:find_package(catkin REQUIRED)
所依賴的其他 catkin 包可以新增到這一行的 COMPONENTS 關鍵字後面,如下所示:find_package(catkin REQUIRED COMPONENTS package-names)
對於 hello 例程,我們需要新增名為 roscpp 的依賴庫,它提供了 ROS 的 C++客戶端庫。因此,修改後的 find_package 行如下:
find_package(catkin REQUIRED COMPONENTS roscpp)
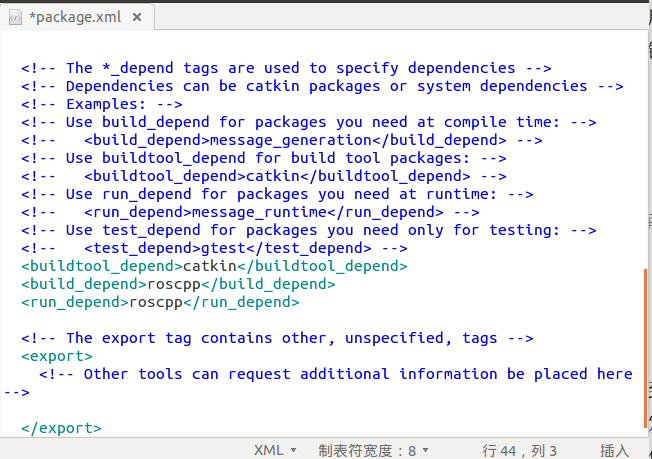
我們同樣需要在包的清單檔案package.xml 中列出依賴庫,通過使用build_depend (編譯依賴)和 run_depend(執行依賴)兩個關鍵字實現:格式如下:
<build_depend>package-name</build_depend>
<run_depend>package-name</run_depend>
在hello 程式在編譯時和執行時都需要 roscpp 庫,因此清單檔案package.xml加入:
<build_depend>roscpp</build_depend> <run_depend>roscpp</run_depend>
package.xml的開啟方式用gedit開啟如圖:
注意:然而,在清單檔案中宣告的依賴庫並沒有在編譯過程中用到;如果你在此處忽略它們,你可能不會看到任何錯誤訊息,直到釋出你的包給其他人,他們可能在沒有安裝所需包的情況下編譯你釋出的包而導致報錯。
第二步:宣告可執行檔案
接下來,我們需要在 CMakeLists.txt 中新增兩行,來宣告我們需要建立的可執行檔案。
其一般形式是:add_executable(executable-name source-files) 此處executable-name為執行檔案的名字(hello),source-files為原始檔的名字(hello.cpp)
target_link_libraries(executable-name ${catkin_LIBRARIES})
第一行聲明瞭我們想要的可執行檔案的檔名,以及生成此可執行檔案所需的原始檔列表。如果你有多個原始檔,把它們列在此處,並用空格將其區分開。
第二行告訴 Cmake 當連結此可執行檔案時需要連結哪些庫(在上面的 find_package 中定義)。如果你的包中包括多個可執行檔案,為每一個可執行檔案複製和修改上述兩行程式碼。
在我的例程中,我們需要一個名為 hello 的可執行檔案,它通過名為 hello.cpp 的原始檔編譯而來。所以我們需要新增如下幾行程式碼到 CMakeLists.txt 中:
add_executable(hello hello.cpp)
target_link_libraries(hello ${catkin_LIBRARIES})
第三步:編譯工作區
利用catkin_make這個命令進行編譯,注意必須從你的工作空間目錄執行,此命令時是進入你的工作空間目錄。
cd ~/test
catkin_make這個命令它將會完成一些配置步驟(尤其是你第一次執行此命令時),並且在你的工作區中建立 devel 和 build 兩個子目錄。這兩個新目錄用於存放和編譯相關的檔案,例如自動生成的編譯指令碼、目的碼和可執行檔案。如果你喜歡,當完成功能包的相關工作後(譯者注:即完成了編寫、除錯、測試等一系列工作後,此時程式碼基本定型),可以放心地刪除 devel 和 build兩個子目錄。
catkin_make
執行完後你的工作空間目錄裡多了devel 和 build 兩個子目錄。如圖為執行出來結果。
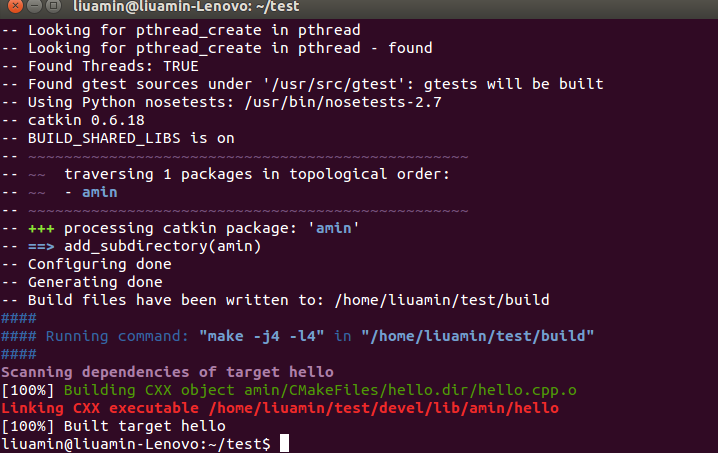
當然,有可能如 果 你 看 到 來 自 catkin_make 的編譯 錯 誤 , 提 示 無 法 找 到ros/ros.h 標頭檔案,或者 ros::init 等 ROS 函式未定義的錯誤,你會在執行此步驟時看見它們。最大的可能性是你的 CMakeLists.txt 沒有正確宣告對 roscpp的依賴。
在更正它們以後,你可以重新執行 catkin_make 來完成編譯工作。
5.執行hello程式
首先要啟動 roscore:這個程式是一個節點,節點需要一個節點管理器才可以正常執行。啟動節點管理器的命令:
roscore
啟動完節點管理器後,執行名為 setup.bash 的指令碼檔案,它是 catkin_make 在你工作區的 devel 子目錄下生成的。
這個自動生成的指令碼檔案設定了若干環境變數,從而使 ROS 能夠找到你建立的功能包和新生成的可執行檔案。(也就是將程式註冊)
注意:除非目錄結構發生變化,否則你只需要在每個終端執行此命令一次,即使你修改了程式碼並且用 catkin_make 執行了重編譯。
注意:此命令必須在你的工作空間目錄執行,進入你的工作空間目錄的命令上文提到過“cd ~/test”,否則會出現“沒有那個檔案或目錄”
source devel/setup.bash
最後一步,執行節點,用命令:使用格式為"rosrun package-name executable-name" package-name 為功能包名稱, executable-name為可執行檔名稱
rosrun amin hello
執行結果如圖:
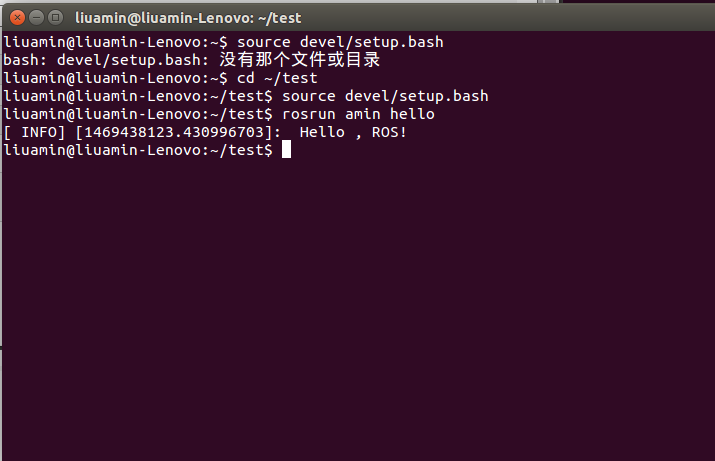
這樣一個簡單的ROS程式就完成了。。
當然網上也有官方的教程,有點不一樣,我覺得這篇很有用,也成功的運行了。這裡有官方教程的一個簡化版,很有必要看下:http://blog.csdn.net/yake827/article/details/44564057
相關推薦
編寫第一個ROS(建立工作空間workspace和功能包package)
剛接觸ROS,學著寫了第一個程式,怕以後忘記,就將其步驟記錄下來。。 首先你必須保證你電腦已安裝配置好ROS。 1.建立工作空間(workspace) 我們所建立功能包package,應該全部放到一個叫做工作空間(workspace)的目錄中 。你可以把目錄儲存在你賬號的任何位置例如,我所建立的
1.ROS建立工作空間
建立一個catkin 工作空間: $ mkdir -p ~/catkin_ws/src //建立一個資料夾 $ cd ~/catkin_ws/src //到該檔案目錄下 $ catkin_init_workpace
ROS下建立工作空間以及編譯一個包
在ROS層面上編寫軟體,需要有相關的工作空間(workspace)。 生成工作控制元件並不複雜,首先,我們開啟一個控制檯(Ctrl+Alt+T),在使用者路徑下信件一個資料夾,我們起名為LearnROS(也可以起一個自己喜歡的名字)。 然後在這個資料夾中再建立一個資料夾,我
ROS學習筆記(一):建立工作空間和功能包
所有的ROS程式,包括我們自己開發的程式,都被組織成功能包,而ROS的功能包被存放在稱之為工作空間的目錄下。因此,在我們寫程式之前,第一步是建立一個工作空間以容納我們的功能包。其實ROS工作空間就是linux下的一個目錄,建立ROS工作空間就是建立一個linux目錄(我們建立名為catkin_ws的
【ROS】建立工作空間和程式包
要使用ROS系統進行開發,首先需要在ROS下建立工作空間(workspace)和程式包(package)。 建立工作空間: $ mkdir -p ~/catkin_ws/src 執行上述命令即在使用者主目錄下建立了catkin_ws資料夾及其子資料夾src(-p表示建立目標路徑上的所
ros回爐2-建立工作空間
建立ros工作空間 *均以indigo為例 在Groovy之前所有版本的ROS都使用rosbuild來建立ROS堆和包。從Groovy開始,另一種名叫catkin的建系統被引入。同時,堆被元資料包取代。 由於現在使用Groovy之前版本的較少,所有我們就從catkin開始學習。
編寫第一個python 指令碼(重要檔案建立備份)
程式設計思路: 需要備份的檔案和目錄由一個列表指定。 備份應該儲存在主備份目錄中。 檔案備份成一個zip檔案。 zip存檔的名稱是當前的日期和時間。 我們使用標準的zip命令,它通常預設地隨Linux/Unix發行版提供。Windows使用者可以使用Info-Z
ROS下工作空間、功能包的建立,以及建立節點,實現節點之間的通訊
我是ROS初學者,完全根據《ROS機器人高效程式設計》第三版這本書學習的,學習第2.4節時,經常會出現一些莫名其妙的問題,所以通過各種上網查資料,最後終於完成了書上的程式設計!以下是我對ROS工作空間的建立、建立節點、實現通訊進行總結 第一步:建立ROS工作空間 我們
ros 無法建立工作空間
在ros的工作空間中執行catkin_make出現下面的錯誤 執行其他的python指令同樣會有這個錯誤。 from pkg_resources import load_entry_point File "/usr/lib/python2.7/site-
建立工作空間並建立和使用自己的ros功能包
建立自己的工作空間: 首先在ctrl+alt+T開啟一個終端,輸入如下命令來建立一個catkin_ws(名字自己定)的工作空間,以後所有的功能包都放在catkin_ws/src目錄下: mkdir -
第二天---介紹Python編譯器,pycharm設置以及編寫第一個Python程序
python學習記錄介紹Python編譯器1.linux下:一般使用vi或者vim直接編譯以.py為後綴的文件,使用vi需要自己搜索vim python 自動補全以方便我們編寫。2.windos下:(1)使用submit選擇Python類型進行編譯,但是對於初學者submit需要安裝許多插件,很麻煩。這些後面
編寫第一個HTML5文件
菜單 圖片 oss sublime bad log 顯示 技術分享 彈出 1.3.1 HTML文件的編寫方法編寫HTML文件主要有如下3種方法:手工直接編寫由於HTML語言編寫的文件是標準的ASCII文本文件,所以我們可以使用任何的文本編輯器來打開並編寫HTML文件,如W
編寫第一個H5頁面
ntp int 小寫 itl body ado har put utf <!DOCTYPE html><html ><head> <meta charset="UTF-8"> <title>第一個H5頁面</
使用Pycharm編寫第一個python程序
int 解釋 image ado 保存 f2c run 51cto 顯示 使用Pycharm編寫第一個python程序打開 Pycharm,選擇 Create New Project,創建一個新項目 選擇Pure Python表示創建一個純Python程序項目, Locat
react學習筆記(二)編寫第一個react組件
pub 技術 spa class ima ade ext css pan 繼續上一節課的內容,打開App.js:會看到如下代碼: import React, { Component } from ‘react‘; //在此文件中引用React,以及reat的組件類
C語言入門 2 安裝VS2013開發環境並編寫第一個C語言程式
分享一下我老師大神的人工智慧教程!零基礎,通俗易懂!http://blog.csdn.net/jiangjunshow 也歡迎大家轉載本篇文章。分享知識,造福人民,實現我們中華民族偉大復興!
ubuntu16.04下ROS作業系統學習(四 / 一)ROS基礎-工作空間
主要知識點: 1.src、build、devel、install各資料夾的功能介紹。 2.建立工作空間(建立資料夾,初始化工作空間)、編譯工作空間、設定環境變數,檢查環境變數 (echo $ROS_PACKAGE_PATH) 3.建立功能包:catkin_create_pkg <
C++在另一個檔案建立名稱空間並呼叫
head.h #ifndef KW_H #define KW_H namespace kw { extern std::string name; } #endif // KW_H head.cpp #include <string> #includ
Flutter入坑指南:編寫第一個Flutter應用
本文由 愛學園平臺 進行聯合編輯整理輸出 原作者:愛學園——莫比烏斯環 這是 Flutter 系列文章的第二篇,關於 Flutter 的相關學習文章後面還有很多,如果您喜歡的話,請持續關注 ,謝謝! Flutter 是 Google 推出的移動端跨平臺開發框架,使
1、編寫第一個java程式--Hello—World
1、下載JDK8.0檔案 下載網址:https://www.oracle.com/technetwork/java/javase/downloads/jdk8-downloads-2133151.html 關於系統配置環境變數,問度娘吧! 2、下載編譯器 編譯器有很多種,包括:Editplus、Ult