
[概述]移動機器人自主探索
Autonomous Exploration自主探索
移動機器人自主探索最主要的任務是確定機器人下一步的期望運動位置,最終實現全域性範圍內以最短無碰撞路徑獲取最多未知正確環境資訊。
Autonomous Navigation自主導航
自主導航和自主探索都涉及兩個問題:一個是自身定位和環境地圖構建(SLAM),一個是路徑規劃(Path Planing)。後者包括全域性路徑規劃和區域性避障(Obstacle Avoidance)。區別於自主導航,自主探索不包含明確的目標點(Goals),根據已知區域探索未知區域,需要找到邊界條件,優化機器人的行走路徑,以最小的代價完成未知環境的探索。

邊界探索演算法
Yamauchi.B提出了基於邊界探索演算法(Froniter-Based)該方法基於影象分割技術提取區域性柵格地圖中已知和未知區域之間的邊界,然後控制機器人選擇向最近邊界區域運動,從而獲取新環境資訊,擴大地圖建立。
NBV(Next best view)探索方法
路徑規劃技術是機器人研究領域中的一個重要分支。所謂機器人的最優路徑規劃問題,就是依據某個或某些優化準則(如工作代價最小、行走路線最短、行走時間最短等),在其工作空間中找到一條從起始狀態到目標狀態的能避開障礙物的最優路徑。依據某種最優準則,在工作空間中尋找一條從起始狀態到目標狀態的避開障礙物的最優路徑。需要解決的問題:
1. 始於初始點止於目標點。
2. 避障。
3. 儘可能優化的路徑。
 (by 王超群)
(by 王超群)

Virtual Force Fields(VFF) 虛擬力場法 (Artificial potential field 人工勢場法)
http://www-personal.umich.edu/~johannb/vff&vfh.htm
RRT快速搜尋隨機樹
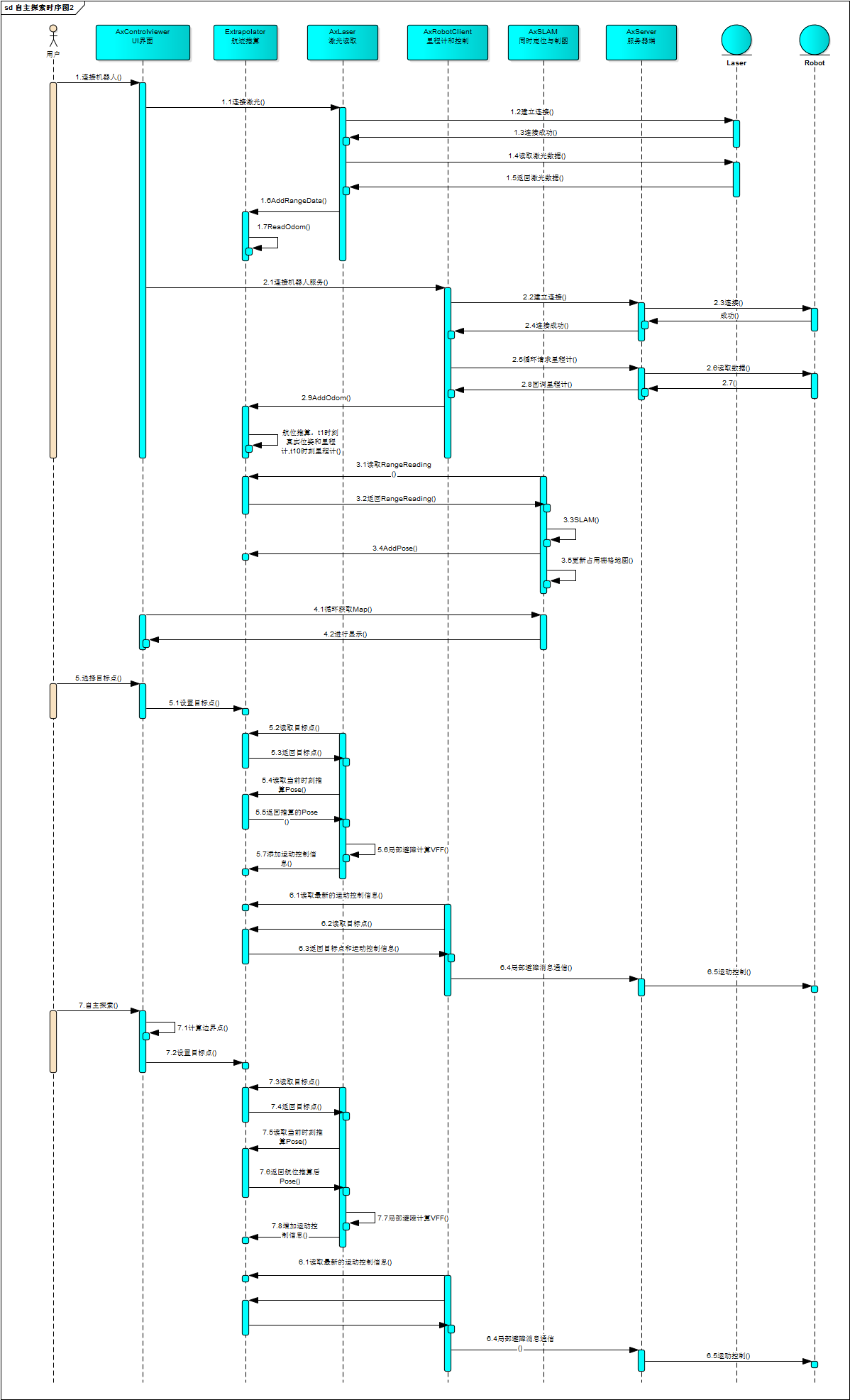
一個淺陋的自主探索的方案

更新一下:
ROS中的導航包

先鋒機器人P3-AT中的自動導航
ArPathPlanningTask is the navigation component
The path planning task uses a grid based search to compute the shortest and safe path from the present robot pose to any reachable point in the given robot enviroment map. It then enables an action that follows the planned path, all the while using the dynamic window method to avoid unmapped obstacles in its path. The path planning thread requires fairly accurate robot location. Hence a localization task (ArLocalizationTask or ArSonarLocalizationTask) must also be run concurrently with the path planning task.
相關閱讀
相關推薦
[概述]移動機器人自主探索
Autonomous Exploration自主探索 移動機器人自主探索最主要的任務是確定機器人下一步的期望運動位置,最終實現全域性範圍內以最短無碰撞路徑獲取最多未知正確環境資訊。 Autonomous Navigation自主導航 自主導航和自主探索都涉及兩個問題:一個是自身定位和環境
基於影象語義的視覺化同時定位和建圖的面向應用程式的移動機器人自主導航解決方案綜述
# 基於影象語義的視覺化同時定位和建圖的面向應用程式的移動機器人自主導航解決方案綜述 論文名稱: A survey of image semantics-based visual simultaneous localization and mapping Application-oriented solut
機器人自主移動的秘密:SLAM與路徑規劃有什麽關系?(三)
針對 left 很多 -s 人在 比較 www. 全局 有時 博客轉載自:https://www.leiphone.com/news/201612/lvDXqY82OGNqEiyl.html 雷鋒網(公眾號:雷鋒網)按:本文作者SLAMTEC(思嵐科技公號slamtec-s
ROS系統玩轉自主移動機器人(5)-- ROS系統建模
關節 evo 編譯 val mpi ans ros 三維 mil 註:本篇博文全部源碼下載地址為:Git Repo傳送門。 1. 下載到本地後解壓到當前文件夾然後運行:catkin_make 編譯。 2. 源碼是在 Ubuntu14.04 + Indigo 環境下編寫。
自主移動機器人的定位與地圖建立(SLAM)關鍵性問題
1.引言: 機器人的研究越來越多的得到關注和投入,隨著計算機技術和人工智慧的發展,智慧自主移動機器人成為機器人領域的一個重要研究方向和研究熱點。移動機器人的定位和地圖建立是自主移動機器人領域的熱點研究問題。對於已知環境中的機器人自主定位和已知機器人位置的地圖建立已經有了一些實用的解決方法。然而在很
基於STM32的ROS智慧移動機器人構建地圖、定位以及自主導航研究
原文地址是:https://blog.csdn.net/huapiaoxiang21/article/details/81504395 好長時間沒寫部落格了,今天繼續工作的第一件事情是做一款STM32 的ROS智慧移動機器人,構建地圖以及自主導航。在這裡筆者認為最難的事情是搞機器人底盤,由於
移動機器人是如何實現自主定位與導航的?
隨著人工智慧技術的發展和社會需求的變化,服務機器人市場需求強勁,將超越工業機器人的增速,成為機器人行業的下一個風口,而服務機器人區別於工業機器人的關鍵技術是,可以自主定位、自主路徑規劃和自主避障。 當我們身處某地,可以通過眼睛觀察周邊環境,如果想要去另一個地方,需判斷最佳路徑,當然也會同時避開障礙物,順利到
webots自學筆記(八)麥克納母輪移動機器人平臺,可控制攝像頭視角
left sad src blog com 例子 好玩 也有 工作量 原創文章,來自“博客園,_阿龍clliu” http://www.cnblogs.com/clliu/,轉載請註明原文章出處。 覺得基礎的東西說的差不多了,之後就分享一些好玩的仿
移動機器人的幾種視覺演算法
轉載https://zhuanlan.zhihu.com/p/21879928 談到移動機器人,大家第一印象可能是服務機器人,實際上無人駕駛汽車、可自主飛行的無人機等等都屬於移動機器人範疇。它們能和人一樣能夠在特定的環境下自由行走/飛行,都依賴於各自的定位導航、路徑規劃以及避障等功能,而視覺演算
基於單目視覺的移動機器人室內定位與運動目標跟蹤
分享一下我老師大神的人工智慧教程!零基礎,通俗易懂!http://blog.csdn.net/jiangjunshow 也歡迎大家轉載本篇文章。分享知識,造福人民,實現我們中華民族偉大復興!
基於ROS1.0的stdr simulation搭建多移動機器人(multiple robots)模擬系統
多移動機器人的概念就不敘述了,直接講如何正確的在ROS系統下構建基於stdr simulation和gazebo平臺下的模擬實驗。 1 前提準備 安裝好如下幾個基本的包: stdr simulation amcl mo
思嵐綻放“2018日本機器人周” 引領機器人自主定位導航未來
10月17日-19日,為期3天的日本機器人周在東京有明國際展覽中心已圓滿落下帷幕,這是目前日本規模最大的服務機器人及機器人相關技術展會,國內機器人自主定位導航領導品牌的思嵐科技,應邀攜帶智慧行走導航方案及核心感測器出席了本次盛會。作為在國內外已有較高知名度的品牌,思嵐科技在展會現場可是賺足了人氣。
SLAM≠機器人自主定位導航
SLAM技術作為機器人自主移動的關鍵技術,讓很多人都誤解為:SLAM=機器人自主定位導航。 其實,SLAM≠機器人自主定位導航 ,不解決行動問題。 SLAM如其名一樣,主要解決的是機器人的地圖構建和即時定位問題,而自主導航
機器人自主定位導航中那些不得不跨的坑
機器人自主定位導航聽起來簡單,地圖資料+演算法的結合,實則挑戰巨大。在落地實踐的過程中,需要解決各種各樣的問題,越過各式各樣的坑,才能最終完美應用。 首先從地圖的呈現方式開始說起。 挑戰一:使用者心理預期地圖的問題 鐳射雷達充當著機器
機器人自主定位導航面臨的3大問題及應對方案
未來,智慧機器人很有可能成為繼PC和智慧手機之後的新一代殺手鐗級別產品,極大的為我們的生活提供便利,但機器人產品的理想落地,需要行業各個技術環節的一起努力,自主定位導航作為機器人自主行走最為核心的技術之一,在落地實踐過程中,也面臨過多項挑戰,最終實現完美應用。 環境多變情況下機器人的可靠定位 在實際的應用
差分移動機器人運動學模型
http://www.diegorobot.com/wp/?p=740&lang=zh https://blog.csdn.net/qq_16149777/article/details/73224070 https://blog.csdn.net/qq_35508344/artic
如何設計一款基於ROS的移動機器人?
編者按:本文是EAI科技創始人兼CEO李金榜在硬創公開課的文字稿,感謝作者和雷鋒網授權轉載。 最近幾年各種移動機器人開始湧現出來,不論是輪式的還是履帶式的,如何讓移動機器人移動都是最核心的工作。要讓機器人實現環境感知、機械臂控制、導航規劃等一系列功能,就需要
rviz 遠端顯示及控制移動機器人的導航
環境: (1)虛擬機器本地端IP 192.168.10.30 (虛擬機器需要通過橋接的形式與PC本地機連線, PC 機IP 192.168.10.21) (2)移動端 IP 192.168.10.11 1 配置本地環境變數 (1)開啟 .bashrc gedit ~/.bashrc
解讀實現機器人自主行走的定位及導航技術
隨著人工智慧技術的發展和社會需求的變化,服務機器人市場需求強勁,將超越工業機器人的增速,成為機器人行業的下一個風口,而服務機器人區別於工業機器人的關鍵技術是,可以自主定位、自主路徑規劃和自主避障。 當我們身處某地,可以通過眼睛觀察周邊環境,如果想要去另一個地方,需判斷最佳路徑,當然也會同時避開障礙物,順利到
移動機器人模擬梳理
最近系統重灌,重新配置模擬環境,因此再次梳理一下 1、模擬環境配置 建立ros工作空間: source /opt/ros/kinetic/setup.bash sh creat_pkg.sh mkdir -p ~/ros_gazebo/src cd ~/ros_g