
機器視覺相機和鏡頭選型
阿新 • • 發佈:2019-01-18
工業相機選型:
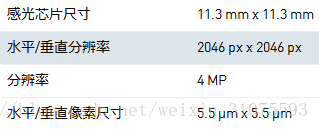
- 解析度:相機每次採集影象的畫素點數,一般對應於光電感測器靶面排列的像元數,解析度=感光晶片尺寸/畫素尺寸,面陣相機的解析度有795×596,1024×1024,2048×2048,5320×5320等。
- 解析度的確定:根據待測物體的尺寸估算出視野的大小,再結合檢測精度,利用上面的公式就可以大概確定檢測系統的工業相機的解析度。
- 線陣相機OR面陣相機:對於靜止檢測或者一般低速的檢測,優先考慮面陣相機,對於大幅面高速運動或者滾軸等運動的特殊應用考慮使用線陣相機。
- 相機幀率:
- 獲得物體至鏡頭的距離(工作距離)WD,如果是一個範圍,取中間值;
- 通過已知的 感測器成像面高度Hi 和 被測物尺寸(視場高度)Ho 計算 影象放大倍數PMAG;
- 利用公式計算所需的焦距f;
- 選取與計算值最接近的標準鏡頭產品,並取其焦距值;
- 根據所選鏡頭焦距重新核算鏡頭到物體的距離WD。
參考文獻: