
關於差速移動機器人的運動學模型推導 1
阿新 • • 發佈:2019-01-22
在機器人的運動中,經常會涉及到航向推演。 下面這篇部落格寫的挺好的。
在學習機器人運動模型推導的時候,有看到 網上別人的推導過程,連結如下:
其中都有相對應的推導過程,但是,如果我只是在這 複製黏貼那就毫無意義了,這裡說一下我的推導思路,沒有做對應的近似,
結果也是很接近,算是開拓思路,減少誤差吧,找個時間將會 搭個機器人里程計 框架計算出結果再與imu對比, 看一下誤差會不會特別大。
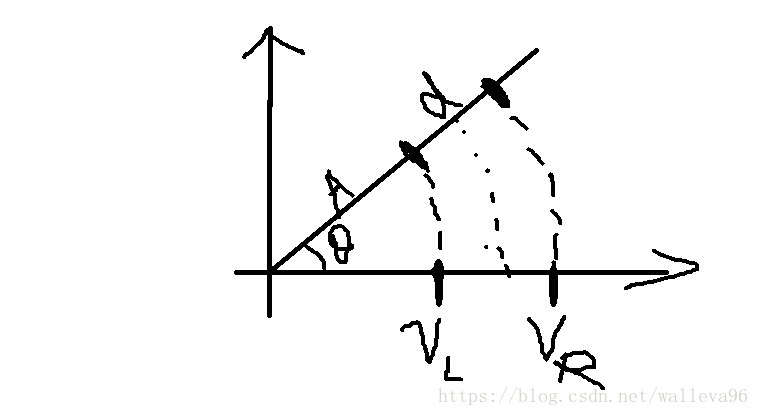
哈哈,感受一下靈魂畫手吧。 在差速機器人模型中,應用 PID(或ADRC演算法)的演算法,對左右輪的電機進行閉環控制,可以得到一個相對比較穩定的轉速狀態,設左路的速度為Vl 右輪為Vr, 那麼模型的中心線的線速度 Va=(Vl+Vr)/2 , 旋轉角為θ, 左輪離圓心的距離為A,右輪離圓心的距離為(A+d), 輪距為d,設運動的時間Δt。
那麼可得左輪的旋轉角的公式為 : θ/360‘= (Δt * Vl)/(2*π*A),右輪的公式為 : θ/360‘= (Δt * Vr)/(2*π*(A+d)),
將二者相等之後,可得: A = (Vl*d)/(Vr-Vl),
模型的中線點的線速度和角度的公式為: θ/360‘ = (Va*Δt)/(2*π*(A+d/2));
結合前面的等式可得: θ/360‘= ((Vr-Vl) *Δt )/(2*π*d) ;
所以 θ = ((Vr-Vl) *Δt *360 )/(2*π*d) ; 弧度制: θ = ((Vr-Vl) *Δt )/(d),
這公式打得累死,===
前面的連結上 都會利用 泰勒級數,對 sin(θ )===》 θ。
如有錯誤,歡迎指出。
最後感謝一下csdn的草稿儲存,差點哭出來 ==