
移動看機器人差速輪運動學模型
做機器人底層程式的時候,經常用到航跡推演(Odometry),無論是定位導航還是普通的方向控制。航跡推演中除了對機器人位姿進行估計,另一個很重要的關係是移動機器人前進速度、轉向角速度
與左輪速度
、右輪速度
之間的轉換。
在機器人區域性路徑規劃演算法DWA解析一文中,是在假設已知機器人前進線速度和角速度
的情況下,對機器人航跡推演的位姿進行推導了,然而缺少如何通過左右輪速度得到
、
,因此本文將補上這個空缺。
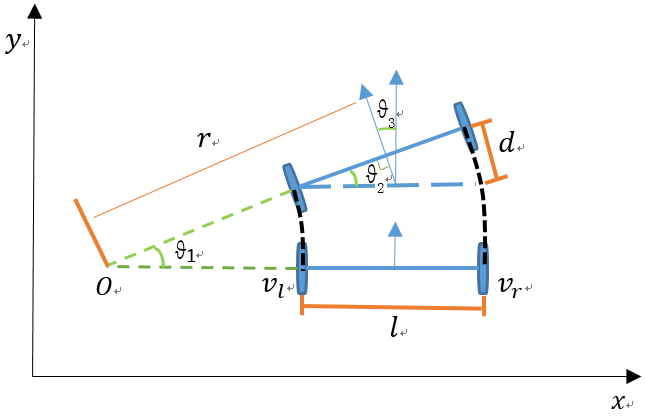
下圖是移動機器人在兩個相鄰時刻的位姿,其中是兩相鄰時刻移動機器人繞圓弧運動的角度,
是兩相鄰時刻移動機器航向角(朝向角head)的變化量。
是左右輪之間的間距,
是右輪比左輪多走的距離。
是移動機器人圓弧運動的半徑。
移動機器人前進速度等於左右輪速度的平均,這個好理解。
(1)
現在來推導機器人航向角如何計算,以及如何計算角速度。如圖所示,把兩個時刻的機器人位置疊加在一起,可以清楚的看到移動機器人航向角變化量是
。從圖中的幾何關係可以得到:
也就是說移動機器人航向角變化了多少角度,它就繞其運動軌跡的圓心旋轉了多少角度。這句話很好驗證,我們讓機器人做圓周運動,從起點出發繞圓心一圈回到起點處,在這過程中機器人累計的航向角為360度,同時它也確實繞軌跡圓心運動了360度,說明機器人航向角變化多少度,就繞圓心旋轉了多少度。而這三個角度中,很容易計算出來,由於相鄰時刻時間很短,角度變化量
很小,有下面的近似公式:
所以可以得到機器人繞圓心運動的角速度,它也是機器人航向角變化的速度:
(2)
線速度、角速度都有了,因此可以推出移動機器人圓弧運動的半徑:
(3)
從公式(3)可以發現當左輪速度等於右輪速度時,半徑無窮大,即直線運動。最後將三個公式綜合起來,可以得到左右輪速度和線速度角速度之間的關係如下,:
