
28BYJ-48步進電機+ULN2003驅動模組
阿新 • • 發佈:2019-01-24
步進電機的操作倒是簡單,只需要引用Stepper.h庫檔案操作即可。
關鍵點:
1、網上買的步進電機,很多接線順序都不對。經過不懈努力查資料,終於找到了能用的接線方式:
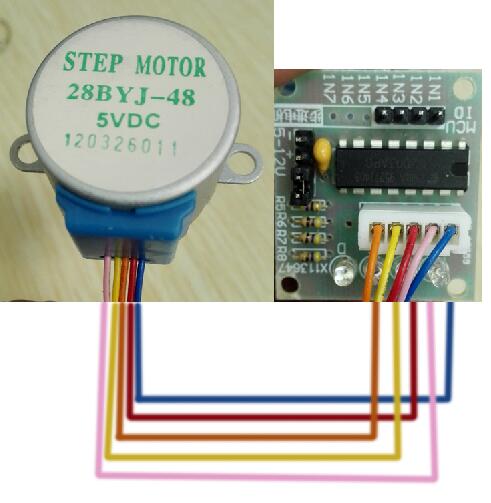
電機上的12345針腳,對應著接線端子的42135。
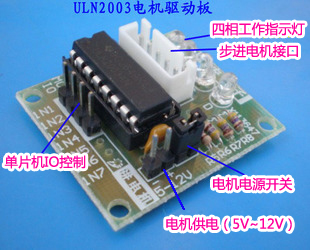
2、ULN2003步進電機驅動板可以讓你方便的用Arduino控制28BYJ-48步進電機。驅動板的電機供電介面可以連線到Arduino的GND和5V取電,但是不推薦這種方法,推薦用獨立的5-12伏1安培的電源或電池組取電。“IN0~IN4”連線arduino的4個數字口(在程式碼裡進行相應的設定)。
3、28BYJ-48步進電機的齒輪減速比為64:1,轉速約15轉/分鐘,一些軟體採用某些手段和高電壓電源(如12伏直流)也能達到約25轉/分鐘的轉速。
4步控制訊號序列:11.25度/步,32步旋轉一週。
8步控制訊號序列:5.625度/步, 64步旋轉一週。
正常情況下,4步模式下旋轉一週將用:32(步/周)X64(齒輪比) = 2048 步。
程式碼如下:
//使用arduino IDE自帶的Stepper.h庫檔案
#include <Stepper.h>
// 這裡設定步進電機旋轉一圈是多少步
#define STEPS 100
//設定步進電機的步數和引腳(就是注意點2裡面說的驅動板上IN1~IN4連線的四個數字口)。
Stepper stepper(STEPS, 8, 9, 10, 11);
void setup()
{
// 設定電機的轉速:每分鐘為90步
stepper.setSpeed(90);
// 初始化串列埠,用於除錯輸出資訊