
opencv 3.0 影象去畸變 undistortion
阿新 • • 發佈:2019-02-05
主要用到的是 initUndistortRectifyMap這個函式
在opencv中這個函式是用於 去除鏡頭畸變的影象拉伸
為了快速演算法:使用了座標查詢變和雙線性差值的方法
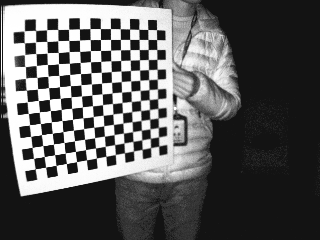
先上結果圖
原圖
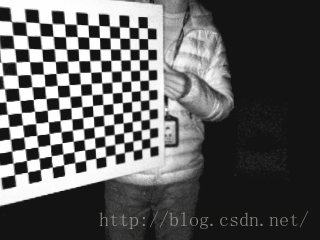
去畸變至全圖

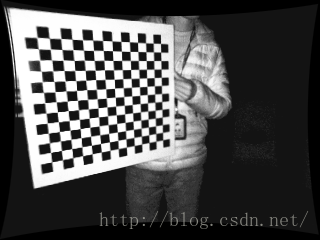
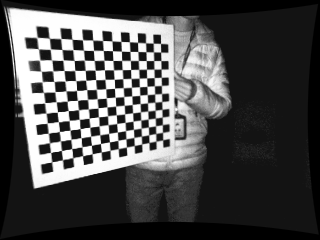
去畸變並保留最大圖
#include "opencv.hpp" using namespace std; using namespace cv; void ReadIntrinsics(Mat &cameraMatrix, Mat &distCoeffs, Size &imageSize, char *IntrinsicsPath) { bool FSflag = false; FileStorage readfs; FSflag = readfs.open(IntrinsicsPath, FileStorage::READ); if (FSflag == false) cout << "Cannot open the file" << endl; readfs["Camera_Matrix"] >> cameraMatrix; readfs["Distortion_Coefficients"] >> distCoeffs; readfs["image_Width"] >> imageSize.width; readfs["image_Height"] >> imageSize.height; cout << cameraMatrix << endl << distCoeffs << endl << imageSize << endl; readfs.release(); } void Undistort_img(Mat map1, Mat map2, char *path) { Mat img1, img2; img1 = imread(path); if (img1.empty()) cout << "Cannot open the image" << endl; remap(img1, img2, map1, map2, INTER_LINEAR); // imwrite(path, img2); imshow("src img", img1); imshow("dst img", img2); waitKey(); } void main() { Mat cameraMatrix, distCoeffs, map1, map2; Size imageSize; char * IntrinsicsPath = "Intrinsics.yml"; ReadIntrinsics(cameraMatrix, distCoeffs, imageSize, IntrinsicsPath); // 去畸變並保留最大圖 initUndistortRectifyMap(cameraMatrix, distCoeffs, Mat(), getOptimalNewCameraMatrix(cameraMatrix, distCoeffs, imageSize, 1, imageSize, 0), imageSize, CV_16SC2, map1, map2); Undistort_img(map1, map2, "E:/VS13/undistort/undistort/1.bmp"); // 去畸變至全圖 initUndistortRectifyMap(cameraMatrix, distCoeffs, Mat(), Mat(), imageSize, CV_16SC2, map1, map2); Undistort_img(map1, map2, "E:/VS13/undistort/undistort/1.bmp"); }