
【ROS機器人作業系統初探索02.01】MoveIt!
安裝的部分我就省略了,跟著官網的步驟來就可以了(需要詳細翻譯步驟的話,可以留言,需要的人多的話,我就出個翻譯教程),第二部分學習完之後
先不要跳到MoveIt!Setup Assistant tutorial,先按照它側目錄的步驟走,不然可能有一些需要tutorial裡面需要用到的東西就被你先刪掉了,變成了你自己的配置檔案,就不能執行demo了。
然後到第三個部分Move Group C++ Interface,跟著教程執行demo,就會在看到
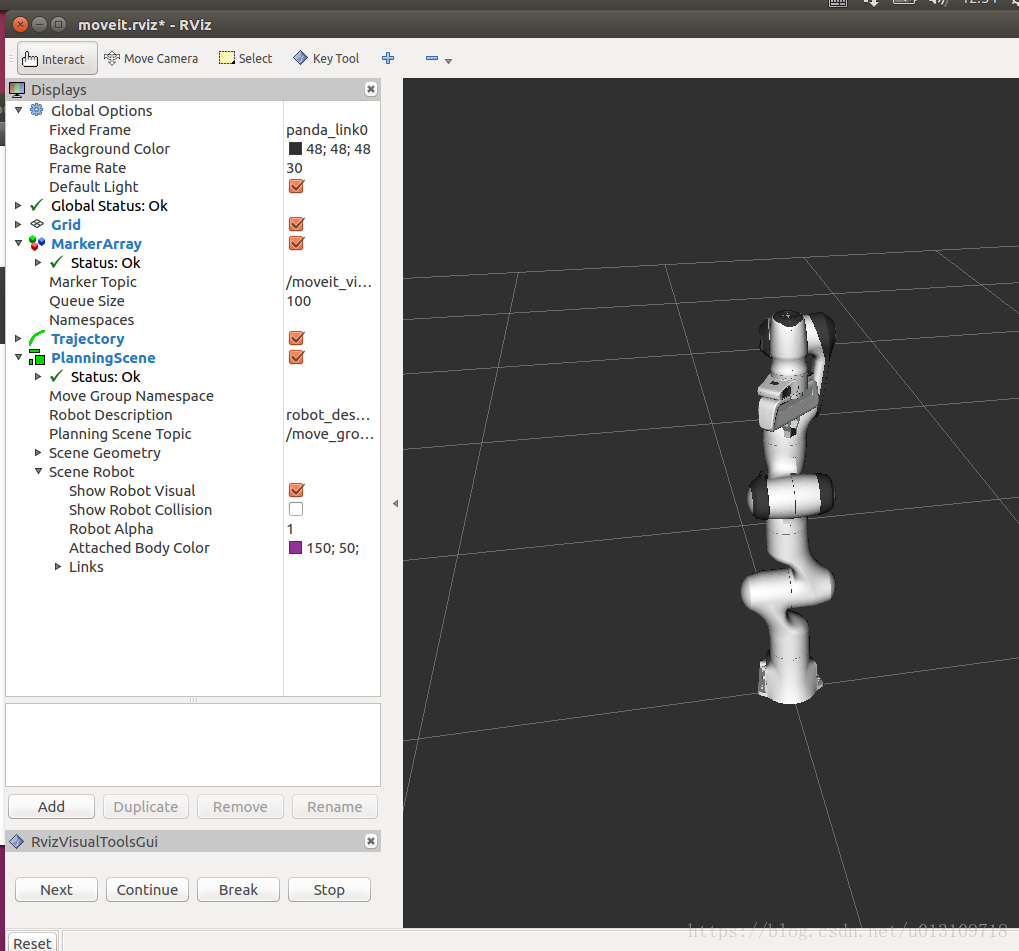
運行了第二個shell之後,然後按next按鈕,我這裡按到第三次的時候會出現一個error,不知道你們有沒有
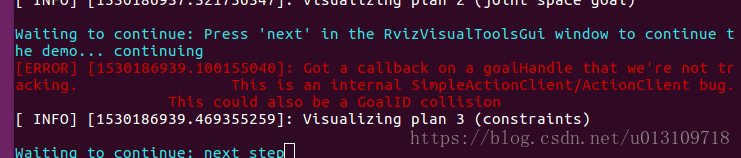
我沒去解決這個問題,然後繼續按next按鈕,之後出現了下面這張圖
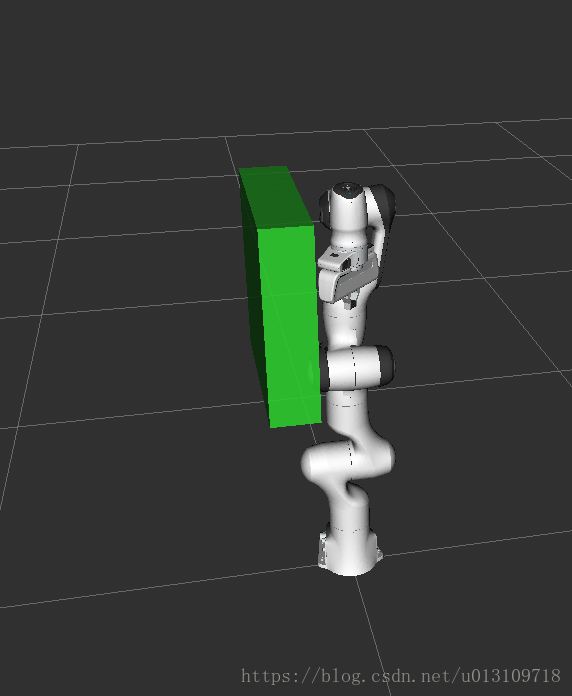
嗯~ o(* ̄▽ ̄*)o這就是我想要的官網的那張圖,繼續next,發現,誒?變色了
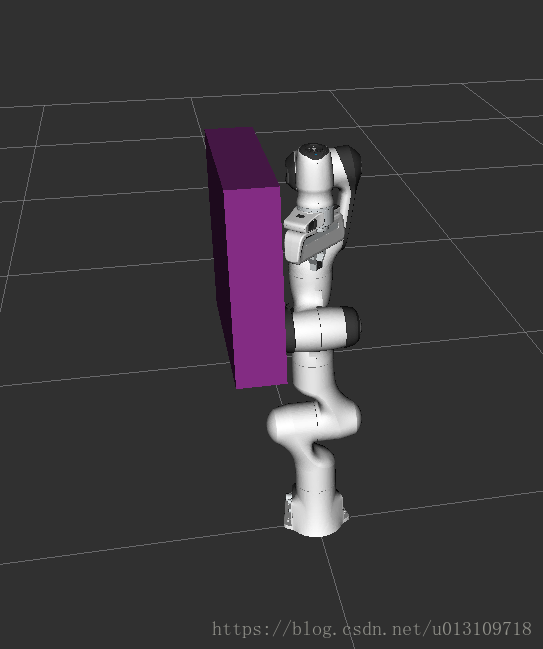
再按一次next又變回了綠色,之後就繼續next直至退出,下面是console裡的內容
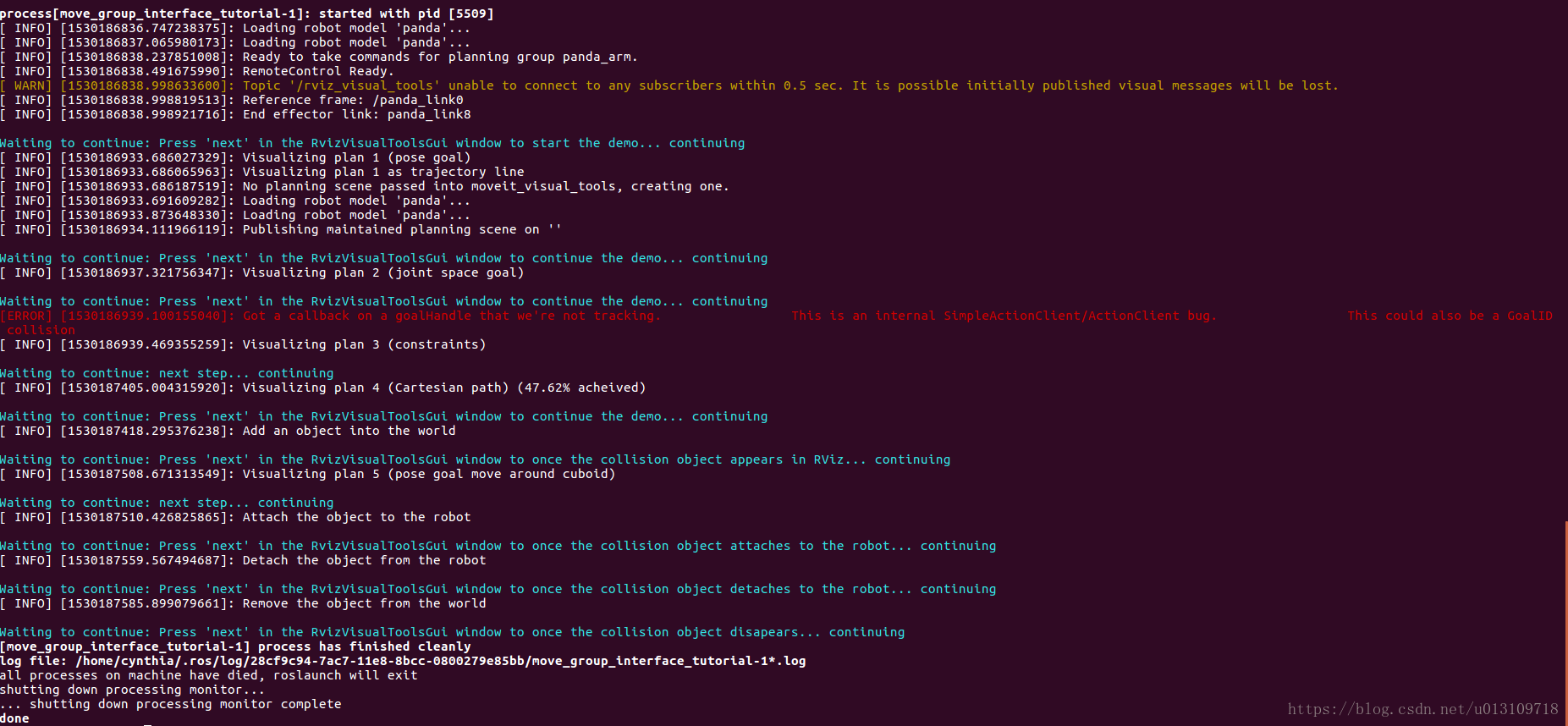
可以清晰的看到每一步在做什麼,然後之後就是介紹程式碼怎麼寫了。我們可以在
這個位置,找到我們執行的c++程式碼,然後官網上面清晰的解釋了每個部分是做什麼的,該怎麼寫。我就不再重複描述了。
試試跟著原始碼對某些引數進行改變,會發生什麼~
相關推薦
【ROS機器人作業系統初探索02.01】MoveIt!
安裝的部分我就省略了,跟著官網的步驟來就可以了(需要詳細翻譯步驟的話,可以留言,需要的人多的話,我就出個翻譯教程),第二部分學習完之後先不要跳到MoveIt!Setup Assistant tutorial,先按照它側目錄的步驟走,不然可能有一些需要tutorial裡面需要用
【ROS機器人作業系統初探索01】安裝與初級教程(主要是貼上了連結,沒有在此描述詳細步驟)
由於畢設選擇了一個與機器人相關的題目,所以開始了漫長的盲目的摸索。至今為止還屬於畢設0突破狀態,因為時間不多了,所以想要寫寫部落格督促一下自己學習,記錄一下學習進展。第一次接觸很多原理的東西都不懂,只知道跟著官網的教程敲入程式碼QAQ感覺長路漫漫,畢業無望先寫一下學習的目標:
在Windows系統安裝ROS機器人作業系統
具體資源英文連結參考:微軟Windows作業系統全面相容機器人作業系統ROS1和ROS2 中文具體資源參考:https://blog.csdn.net/ZhangRelay/article/details/82928141 目前,ROS1和ROS2,已經基本實現了全平臺支援(Window
ROS機器人作業系統 基礎知識 節點 話題 訊息 服務 行動 引數 日誌 TF變換 目標結構 啟動檔案
ROS機器人作業系統 基礎知識 節點 話題 訊息 服務 行動 引數 日誌 TF變換 目標結構 啟動檔案 1. 安裝 官方安裝指北 博文github a 新增 sources.list sudo sh -c 'echo "deb http://package
ROS機器人作業系統資料與資訊(2018年12月)
要聞一覽: ROS 2新版 開源機器人論文集徵稿 機器人導航新功能 適用18.04+16.04的ROS QT 4.8 行為樹 釋出ROS版本號命名 Existing ROS 2 names and codenames: Ardent Apa
【GDKOI2012模擬02.01】數字
想了2個小時。。。都想到數位DP去了,雖然沒打(但是我瘋了) 打表找規律。比賽時打了個表發現每九個的D()都是一迴圈(1~9) 然後想著怎麼做,先打了個暴力然後在想,沒想到的是: 如果x為喜歡的數的話,那麼x+22680也是喜歡的數。 為什麼? 設x=a·D(a),那麼x+22680
[JZOJ2702] 【GDKOI2012模擬02.01】探險
題目 題目大意 給你一個每條邊正反權值不一定相同的無向圖,求起點為 1 1 1點的最小環。
[JZOJ2701] 【GDKOI2012模擬02.01】矩陣
題目 題目大意 給你一個矩陣,然後你需要構造一個等長等寬的矩陣,其中矩陣的每一個數字都有一個固定的範圍 [ L
[JZOJ2700] 【GDKOI2012模擬02.01】數字
題目 題目大意 其實這題的題目大意非常簡練,所以我認為我不用解釋了。 思考歷程 首先亂推了一波,然後什麼東西都沒有發現。 於是想想 D
ROS機器人作業系統的安裝 配置與初級教程 1
分享一下我老師大神的人工智慧教程!零基礎,通俗易懂!http://blog.csdn.net/jiangjunshow 也歡迎大家轉載本篇文章。分享知識,造福人民,實現我們中華民族偉大復興!
ROS機器人作業系統線上練習
通過網頁快速瞭解Linux(Ubuntu)和ROS機器人作業系統,請參考實驗樓線上系統如下:廢話不說,先看圖吧:1. ROS in 5 DaysEntering ROS2. ROS Navigation
ros機器人作業系統安裝
注意我採用的時ubuntu16.04, ros是kinetic。<1>.ROS安裝步驟:1. Setup your sources.listsudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb
ROS機器人作業系統中級教程 3
roslaunch在大型專案中的使用技巧 課程描述: 本教程主要介紹roslaunch在大型專案中的使用技巧。重點關注如何構建launch檔案使得它能夠在不同的情況下重複利用。我們將使用2dnav_pr2功能包作為學習案例。 課程難度: 中級 目錄 簡介高層結構機器標籤和環境變數引數、名稱空間和yaml
【Laya2.0引擎踩坑筆記 01】—— 整合Protobuf
安裝node.js以及nmp、protobufjs 在執行 pb-egret add 之後,bin下會生成protobuf資料夾,將 .proto 檔案放到它下面,然後執行第2步。 因為多個.pro
【ssm個人部落格專案實戰01】SSM環境搭建
前言 今天開始就做一個個人部落格實戰專案了,首先就專案環境的搭建,萬丈高樓平地起。這篇 部落格主要講解基於maven的ssm專案整合。 1、ssm系統架構 整合步驟 第一步: MyBatis和Spring整合,通過Spring管理mapp
【STM32 .Net MF開發板學習-01】Hello world
現在我們終於可以用三四百元的價格獲得史上最便宜的.Net Micro Framework開發板了(參見《》),現在我們拋棄掉所謂的模擬器,我們在真機上體驗一下執行最簡單的“Hello world”程式的效果。 開發前準備: 1、下載並安裝VS2008 SP1 .Net Mic
【探索之路】機器人篇-ROS系統並創建工作空間和項目
wid 輸入 圖片 描述 wiki 創建目錄 dir osc ins 在ROS官網,已經給出了詳細的教程。下面我就般一下磚,把相應的操作寫到這裏。官方網址:http://wiki.ros.org/cn/ 安裝ROS系統 indigo在ubuntu上的安裝教程。官網:
【ROS】關於MOOC中《機器人作業系統入門》中可能遇到的問題解決方案
1、安裝ROS過程中總是提示缺少某個模組,比如說re模組: 檢查你的計算機是否安裝了pyhton3, 如果是的話把.bashrc檔案中的python3註釋掉,應該就能解決問題 2、在rviz中無法看到laserscan的影象: 首先用topic list檢查是否已經啟動了所有需要的topic,
ROS新手教程【一】ROS開源機器人作業系統簡介
大多數已經存在的機器人軟體工程都包含了可以在工程外重複使用的驅動和演算法,不幸的是,由於多方面的原因,大部分程式碼的中間層都過於混亂,以至於很困難提取出它的功能,也很難把它們從原型中提取出來應用到其他方面。為了應對這種趨勢,我們鼓勵將所有的驅動和演算法逐漸發展成為和ROS沒有依賴性單獨的庫。RO
【Py大法系列--01】20多行代碼生成你的微信聊天機器人
tps 自動機 efault 分析 Language 機器人接口 fff except 之一 前言 近期Stack Overflow公布了一項調查顯示,Python已經成了發展最快的主流編程語言,Python搭乘著數據科學和機器學習以及人工智能的浪潮,席卷了整個技術圈。越