
eye-in-hand手眼標定系統
阿新 • • 發佈:2019-02-11
上一個博文說了一種手眼標定系統的特殊情況,就是相機隨著機械手一起移動的情況。雖然前面簡單介紹了一種辦法,就是內次拍照時讓相機回到之前標定的位置,但是這樣處理機器人的工作效率就會大大降低,產生很多重複動作,所以這篇博文就來講一種更簡單的標定方案。
下面是halcon官方給的手眼標定系統的案例程式碼。
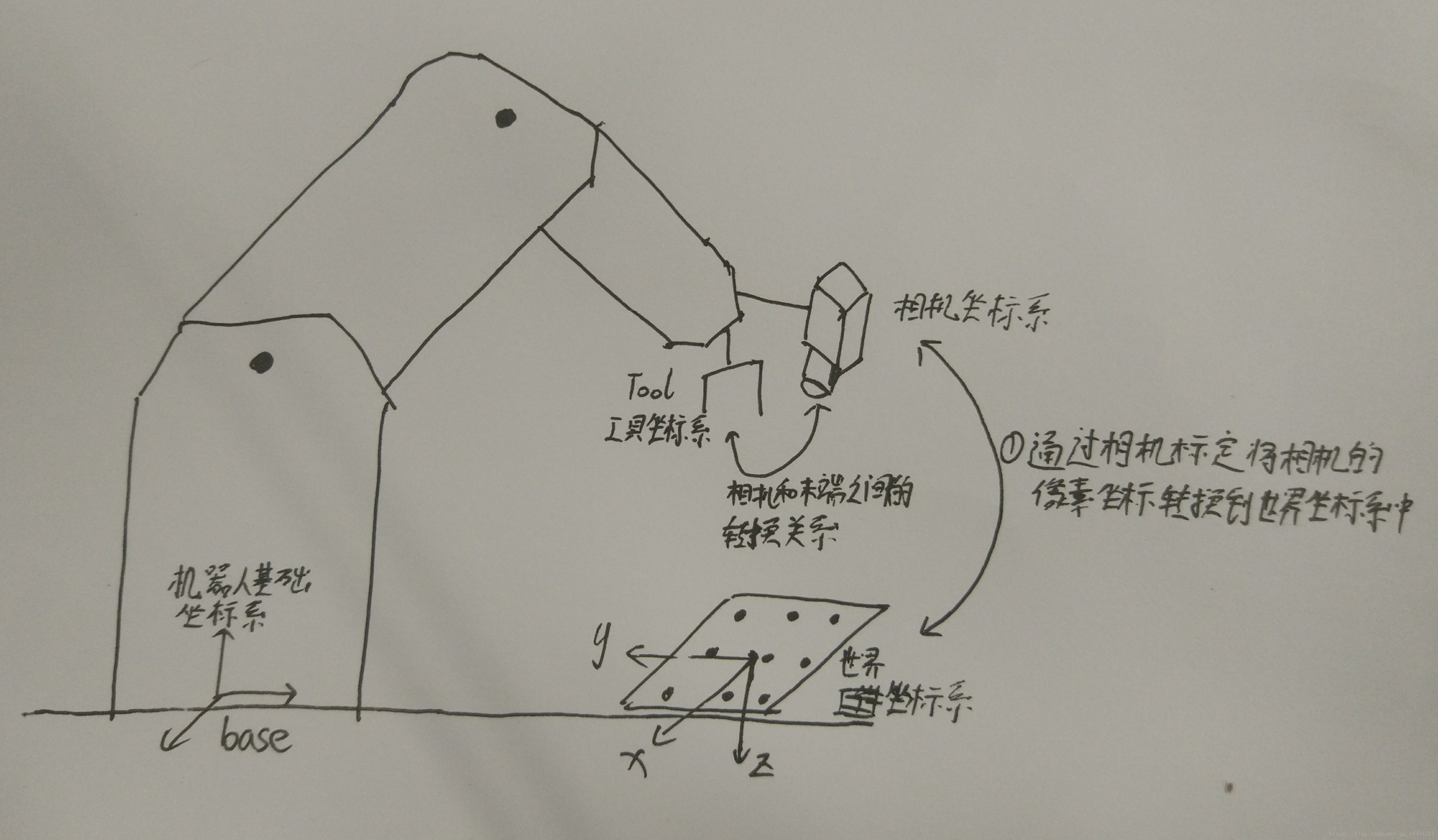
這個例子主要應用於相機固定在機械手末端的手眼系統中,而且標定板相對於機器人也是靜止的。
在這種情況下,手眼校準的目標是確定兩個未知姿勢:
校準物件(CalObjInBasePose)的座標系中機器人基座的姿態。
相機在工具中心點座標系中的姿態。
理論上,作為輸入,該方法在攝像機座標系中至少需要3個校準物件的姿勢。但是我們在實際工程應用中需要至少10個姿態。
校準物件的姿態是從連線到機器人的攝像頭記錄的校準物件的影象中獲得的。為了獲得更好的結果,將攝像機相對於校準物件放置以使物件在影象中傾斜是至關重要的。
在手眼校準之後,提取計算出的變換並用於計算攝像機座標系中校準物件的姿態。
dev_update_off ()
* Directories with calibration images and data files
ImageNameStart := '3d_machine_vision/handeye/movingcam_calib3cm_'
DataNameStart := 'handeye/movingcam_'
NumImages := 14
read_image (Image, ImageNameStart + '00')
dev_close_window ()
get_image_size (Image, Width, Height)
dev_open_window (0